Energia kinetyczna w ruchu płaski Wykład 15
Ruch płaski uzyskany, traktując ten ruch jako złożony z ruchu postępowego unoszenia z prędkością środka masy
Vu= VC i ruchu obrotowego względnego dookoła prostej
przechodzącej przez środek masy C, prostopadłej do płaszczyzny kierującej.
y z
Vw ω
0 y
C r V rC
A VC C
rC VC r
0 x x A
V
Rys. 48 Vw = w, VC = Vu = u, V = w +VC


(a)
![]()
![]()
(b)
![]()
(c)
ponieważ 

położenie środka masy względem środka masy
równa się zero.
Podstawiając (b) i (c) do (a) otrzymujemy
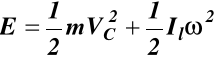
gdzie ![]()
(61)
(61) jest nazywane Twierdzeniem Koeniga
Dynamika ruchu obrotowego ciała sztywnego
Zasada pędu i krętu w ruchu obrotowym
α, β, γ kąty między osią obrotu a osiami x,y,z (rys.49)
z γ l z
ε
α β
0 y 0 ω
z
x Rys.49 x l
Składowe prędkości i przyśpieszenia kątowego są
![]()
, ![]()
, ![]()
(a)
![]()
, ![]()
, ![]()
(b)
Pęd ogólny H i jego pochodna względem czasu ![]()
![]()
(c)
![]()
(d)
z
C m
rC dm
r
0 y
zC xC z
yC xC
y
x
Rys.50
W ogólnym przypadku składowe VC i aC
wyznaczamy ze wzorów
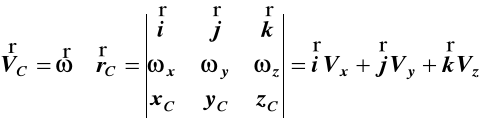
(e)
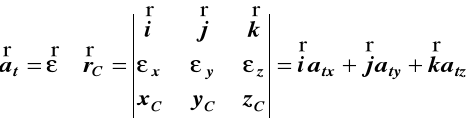
(f)
(g)
W przypadku gdy oś 0z pokrywa się z osią obrotu l wtedy
ωx = 0, ωy = 0, ωz =ω
εx = 0, εy = 0, εz = ε (h)
oraz
Vx = - ωxC, Vy = ωxC, Vz = 0
atx = - εyC, aty = εxC, atz = 0 (i)
anx = - ω2xC, any = - ω2yC, anz = 0
Przy tym założeniu składowe pędu ogólnego H wynoszą
Hx = mVCx = - mωyC
Hy = mVCy = mωxC (j)
Hz = mVCz = 0
Natomiast składowe pochodnej względem czasu
pędu ogólnego H są równe
![]()
![]()
(62)
![]()
gdzie: Px, Py, Pz składowe sumy geometrycznej
wszystkich sił zewnętrznych działających na ciało
Równania (62) opisują zasadę pędu w ruchu obrotowym
Ogólny moment pędu (kręt) względem punktu 0 (rys.49) i (rys.50) leżącego na osi obrotu l wynosi 
gdzie ![]()
![]()
(63)
![]()
Z wzoru (e) wynika
![]()
![]()
![]()
(k)
Podstawiając (k) do (63) i wykonując całkowanie mamy
![]()
![]()
(64)
![]()
Gdy osią obrotu jest oś 0z, wówczas wzory (64)
mają postać
Kx = - Ixzω, Ky = -Iyzω, Kz = Izω (64)
Aby otrzymać równania dynamiczne dla ciała sztywnego
o nieruchomym jednym punkcie, oprzemy się na twierdzeniu dotyczącym krętu względem nieruchomego bieguna. Obierając jako biegun środek ruchu kulistego mamy 
gdzie ![]()
suma momentów sił zewnętrznych (J. Misiak Mechanika Techniczna tom 2
strona 218).
Reakcje dynamiczne łożysk osi obrotu
Przykład 22
Punkt materialny o masie m obraca się wokół osi AB (rys.51) z prędkością kątową ω = const.
Rozwiązanie xω2m
x l RBx ω
m B z
z h RBy
RAx z yω2m
A y
RAy
y Rys.51
Suma rzutów sił na osie
![]()
![]()
Suma momentów względem osi x i y
![]()
![]()
po rozwiązaniu tych równań otrzymujemy
Uwagi dotyczące wyważenia kół
ω2hm
RA b h
0
c
h RB
a ![]()
ω2hm
Suma rzutów sił na oś pionową
RA - RB - ω2hm + ω2hm = 0 stąd RA = RB
suma momentów względem punktu 0
![]()
dla a = b RA = RB = 0
50dyn
51dyn
52dyn
53dyn
54dyn
49dyn
Wyszukiwarka