Projekt z napędu elektrycznego
Temat:
Regulacja prędkości silnika szeregowego
Piotr Jasiński
Silniki szeregowe stosuje się głównie do napędów mechanizmów o rozruchu ciężkim i dużej częstości łączeń narażonych na przeciążenia. Przez zastosowanie specjalnych układów można osiągnąć dużą różnorodność charakterystyk mechanicznych. Nastawianie prędkości silnika szeregowego odbywa się przez wprowadzenie opornika do obwodu twornika i prace na charakterystykach sztucznych. Poza tym stosuje się bocznikowe uzwojenia wzbudzenia szeregowego.
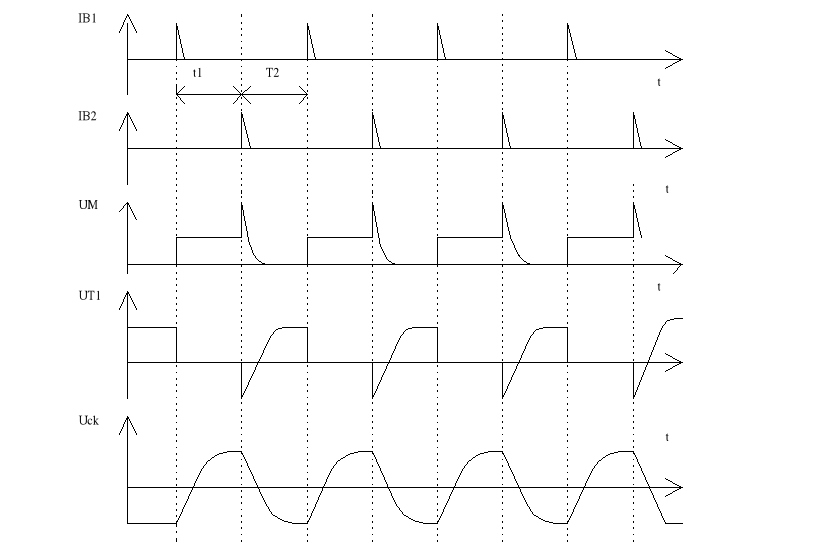
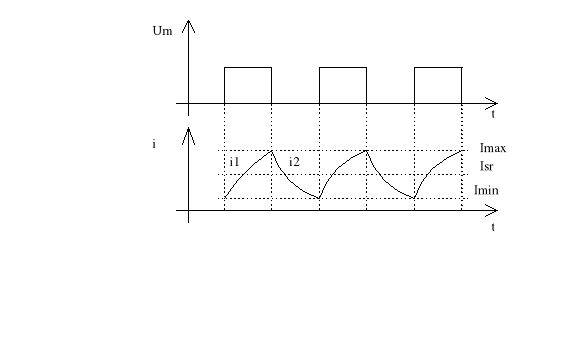
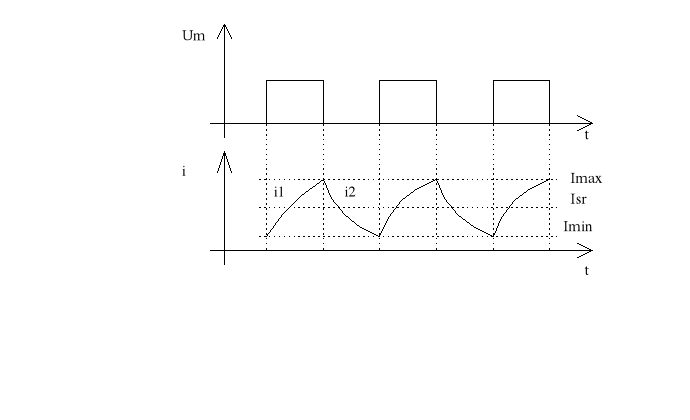
Najbardziej ekonomicznym sposobem regulacji prędkości silnika szeregowego jest zmiana napięcia zasilania silnika. Zastosowanie układów tyrystorowych umożliwia uzyskanie tego sposobu regulacji także w przypadku zasilania silnika z sieci prądu stałego. Regulacja prędkości silnika szeregowego przy zastosowaniu łącznika tyrystorowego, polega na doprowadzeniu energii elektrycznej do silnika w sposób dyskretny. Jeżeli w okresie t1 do silnika doprowadzane jest pełne napięcie sieci prądu stałego , a w okresie t2 wartość tego napięcia wynosi zero, to prędkość silnika określona będzie wartością średnią napięcia za okres impulsowania Ti :
Ti=t1+t2
Układy działające wg omawianej zasady muszą spełniać warunek:
Ti << Tm , gdzie Tm - elektromechaniczna stała czasowa silnika.
Spełnienie powyższego warunku zapewnia utrzymanie przez silnik stałej prędkości w funkcji czasu.
Regulacja prędkości odbywa się przy warunkach:
Ti=t1 +t2 =const i t1/T1 = var
Zmiana stosunku:
t1/Ti=ε
powoduje zmianę wartości średniej napięcia na zaciskach silnika i prowadzi do zmiany prędkości.
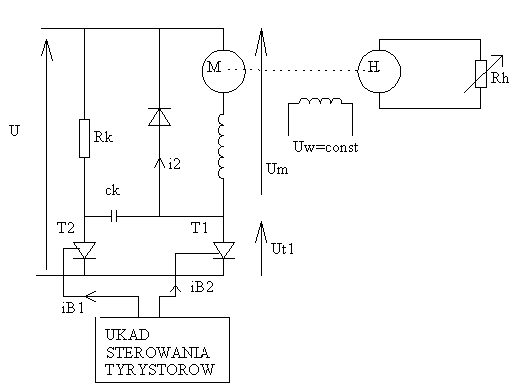
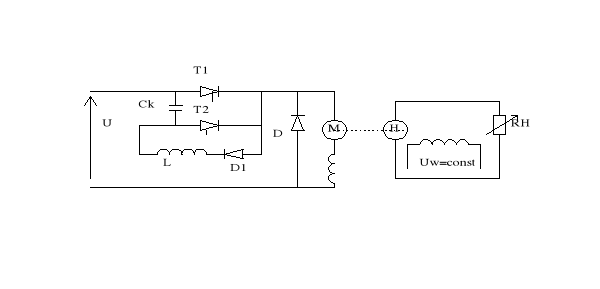
Tyrystor T1 zapewnia cykliczne załączanie silnika M na napięcie sieci U, dioda D umożliwia rozładowanie energii pola magnetycznego silnika w okresie wyłączenia tyrystora T1. Tyrystor T2, rezystor Rk oraz kondensator ck stanowią elementy komutacyjne, umożliwiające wyłączenie przewodzących tyrystorów i cykliczną pracę układu polegającą na przemiennym przewodzeniu jednego i drugiego tyrystora z częstotliwością ![]()
.
Zakładamy iż początkowo tyrystor T1 jest zablokowany a przewodzi tyrystor T2. Chwilowa wartość napięcia na zaciskach silnika jest równa zero. Na anodzie tyrystora występuje napięcie +U, kondensator Ck naładowany do napięcia -U. Na początku okresu t1 pojawia się impuls sterujący na tyrystorze T1, następuje zapłon tyrystora T1, na zaciskach silnika pojawia się pełne napięcie sieci, napięcie na tyrystorze T1 spada do zera. Kondensator Ck przeładowuje się w obwodzie +U, Rk, Ck, T1, -U, polaryzując przez pewien okres zaporowo tyrystor T2, który przestaje przewodzić przechodząc w stan blokowania. Po całkowitym przeładowaniu - napięcie na kondensatorze wynosi +U. Po upływie czasu t1 pojawia się impuls sterujący w obwodzie bramki tyrystora T2. Przebieg zjawisk przebiega teraz odwrotnie do opisanych powyżej. Przewodzi T2, wyłącza się T1, przeładowuje się kondensator do napięcia -U. W momencie załączenia T2 na zaciskach silnikach panuje napięcie 2U, ponieważ przeładowujący się w obwodzie +U, M, UWM, Ck, T2, -U kondensator był przeładowany do napięcia +U.
Założenia jakie należy zachować w celu łatwego określenia ch-ki mechanicznej:
1)
Tyrystory stanowią łączniki idealne tzn pomija się spadek napięcia na przewodzącym tyrystorze i prąd upływu tyrystora w stanie blokowania.
Czas zmiany stanu przyjmuje się jako znikomo krótki.
2)
Pojemność kondensatora komutacyjnego jest na tyle mała że prądy przeładowania kondensatora nie maja wpływu na działanie silnika.
Wartość średnią napięcia na zaciskach silnika określamy zależnością:
Bilans napięć obwodu silnika ma postać:
![]()
![]()
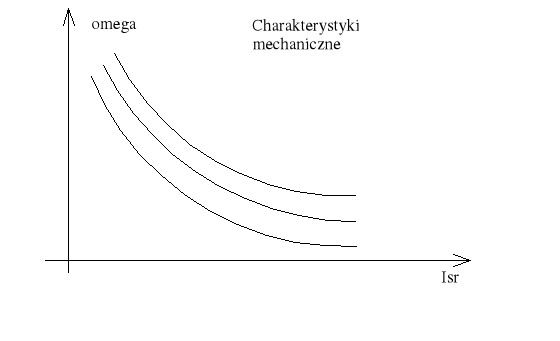
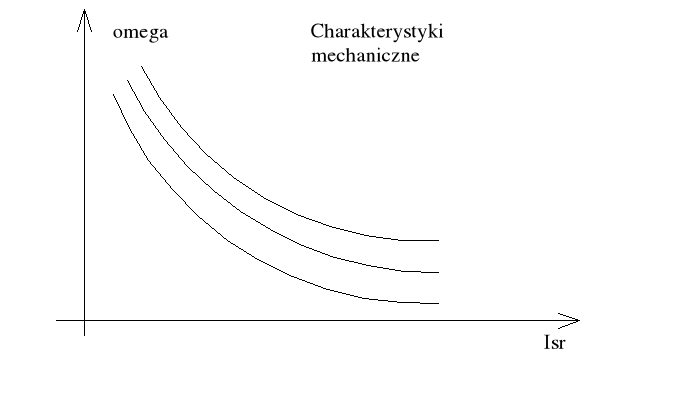
Rodzina charakterystyk mechanicznych silnika szeregowego zasilanego przy użyciu łącznika szeregowego:
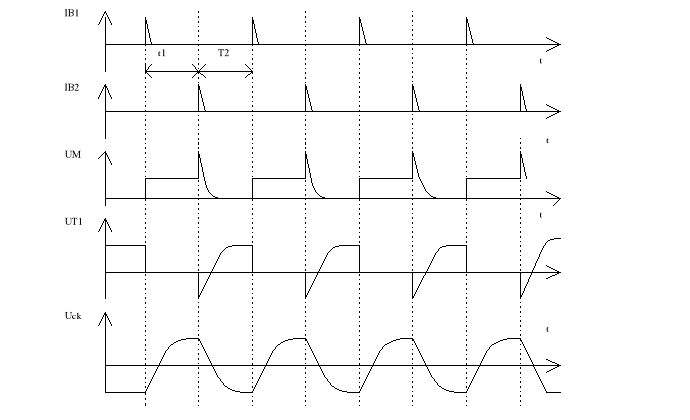
Przebiegi napięcia i prądu:
Omawiany powyżej łącznik pracuje prawidłowo w zakresie względnego czasu pracy 0,1< ε <0,9. Przekroczenie podanych zakresów prowadzi do zmniejszenia się amplitudy napięcia na kondensatorze , co zmniejsz możliwość wyłączania się przewodzącego tyrystora co prowadzi do stanu awaryjnego łącznika. Polega on na równoczesnym przewodzeniu obu tyrystorów i niemożliwości wyłączenia żadnego z nich. Kolejna wadą omawianego łącznika jest stosunkowa mała sprawność, zwłaszcza przy małych wartościach względnego czasu pracy.
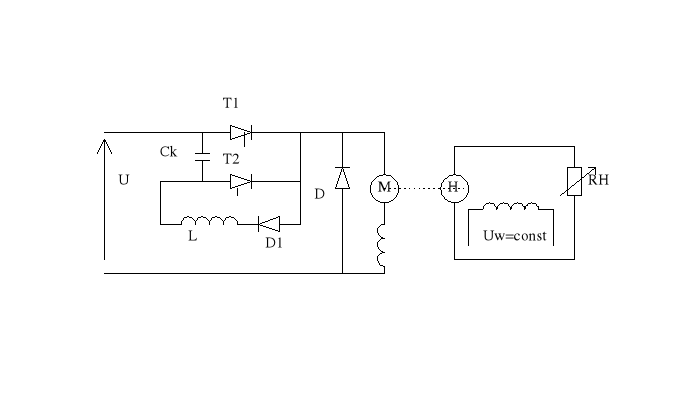
Łącznikiem tyrystorowym pracującym przy wyższej sprawności jest łącznik tyrystorowy o komutacji rezonansowej :
Pokazany na powyższym rysunku układ dostarcza energię porcjami w takt załączania i wyłączania tyrystora głównego T1. Praca łącznika rozpoczyna się w momencie podania impulsu sterującego do obwodu bramki tyrystora pomocniczego T2. Przewodzenie tego tyrystora powoduje ładowanie się kondensatora Ck w obwodzie : +U, Ck,T2 , M, UWM,-U, do napięcia U.
Przewodzenie tyrystora T2 trwa do momentu obniżenia się prądu ładowania kondensatora do wartości krytycznego prądu przewodzenia tyrystora T2. W chwili osiągnięcia tego prądu tyrystor T2 przechodzi samoczynnie w stan blokowania. Podanie impulsu sterującego do obwodu bramki tyrystora T1 powoduje jego załączenie, podanie pełnego napięcia do obwodu silnika M i przeładowanie się kondensatora Ck w obwodzie: T1, D1, L.
Indukcyjność L tak dobrana, że przeładowanie ma charakter oscylacyjny. Ponieważ dioda D umożliwia przepływ prądu tylko w jednym kierunku, kondensator przeładuje się do przeciwnej biegunowości napięcia bliskiego U.
Podanie następnego impulsu sterującego T2 powoduje zaporową polaryzację T1 i jego wyłączenie.
Tyrystorowy łącznik o komutacji rezonansowej daje podobne przebiegi napięcia i prądu silnika jak układ łącznika o komutacji pojemnościowej, podobna jest także w tym łączniku zasada regulacji prędkości silnika. Uruchamiając łącznik o komutacji rezonansowej należy pamiętać aby pierwszy impuls sterujący została podany do tyrystora T2.
Wyszukiwarka