POLITECHNIKA WROCŁAWSKA |
Spraw. wyk.: Krzysztof Małys |
Wydział Inżynierii Środowiska |
|||
LABORATORIUM Z FIZYKI Rok:2 Semestr:3 |
|||||
Data 21.11.1995 |
Temat: Badanie ferromagnetyków. |
Ocena: |
|||
Nr.lab. :6. Nr.ćw. :58. |
|
|
|||
I. CEL ĆWICZENIA JEST:
Obserwacja oscyloskopowa krzywych histerezy magnetycznej dla różnych ferromagnetyków i wyznaczanie pozostałości magnetycznej, natężenia pola koercji oraz kształtu pierwotnej krzywej magnesowania, pomiar temperatury Curie.
II. WSTĘP TEORETYCZNY.
1. Pole magnetyczne.
Pole magnetyczne w ośrodkach można scharakteryzować za pomocą następujących wielkości: indukcji magnetycznej , natężenia pola magnetycznego i polaryzacji magnetycznej.
Ogólny związek między tymi wektorami ma postać:
= μ0+ ;
gdzie μ0 - przenikalność magnetyczna próżni (μ0 = 4 π x 10-7 Vs / Am);
W wielu ośrodkach spełniony jest ponadto związek:
= μ0 ℵ= μ0 (μ -1) gdzie;
ℵ - podatność magnetyczna ośrodka;
μ - względna przenikalność magnetyczna ośrodka (μ = ℵ + 1);
Z obu tych związków wynika zależność:
= μ0μ.
Podatność magnetyczna ℵ i przenikalność magnetyczna μ charakteryzują własności magnetyczne ośrodka:
- diamagnetyki (ℵ < 0 i μ <1);
- paramagnetyki (ℵ > 0 i μ >1);
- ferromagnetyki (ℵ >> 0 i μ >>1 oraz μ ≠ const);
Diamagnetyki i paramagnetyki należą do materiałów słabo magnetycznych, ich przenikalność magnetyczna jest bliska jedności. Ferromagnetki mają bardzo dużą przenikalność magnetyczną.
2. Ferromagnetyki.
Z mikroskopowego punktu widzenia ciała ferrromagnetyczna są to takie ciała, których atomy mają nieskompensowane spinowe momenty magnetyczne elektronów.
Warunkiem istnienia ferromagnetyzmu jest:
- istnienie nieskompensowanych spinowych momentów magnetycznych, które mogą wystąpić tylko w atomach z nizapełnionymi całkowicie powłokami elektronowymi.
- oddziaływanie między momentami spinowymi elektronów sąsiednich atomów, prowadzące do ich wzajemnej orientacji równoległej.
Każdy ferromagnetyk ma strukturę domenową. Zewnętrzne pole magnetyczne powoduje domen w kierunku tego pola.
3. Natężenie pola magnetycznego H, indukcja magnetyczna B, pozostałość magnetyczna Br i pole koercji He.
a. Wartość natężenia pola magnetycznego (pola koercji) określamy ze wzoru:
H(He) = [A/m]
n1 - ilość zwojów uzwojenia pierwotnego;
l - średnia długość drogi magnetycznej;
R1 - wartość rezystancji;
Ux - wartość spadku napięcia na rezystorze R1;
b. Wartość indukcji magnetycznej(pozostałości magnetycznej) określamy ze wzoru:
B(Br) = [T - tesla]
R2 - rezystancja rezystora R2;
s - przekrój poprzeczny próbki
Uy - wartość spadku napięcia na kondensatorze c1;
C1 - pojemność kondensatora C1;
n2 - ilość zwojów uzwojenia wtórnego;
III. SPIS PRZYRZĄDÓW.
1. Oscyloskop STD - 501xy;
2. Autotransformator regulowany typ Ar - 202;
3. Transformator sterujący typ 2TS - 3;
4. Stabilizator prądu typ SP - 102;
5. Rezystor dekadowy typ RD - 101;
6. Trzy próbki ferromagnetyków;
IV. DANE DLA TRZECH PRÓBEK FERROMAGNETYKÓW.
Nr. próbki |
R1[Ω] |
n1[zw] |
n2[zw] |
l[mm] |
s[mm2] |
1 |
10 |
200 |
200 |
90 |
45 |
2 |
8.2 |
250 |
200 |
94 |
56 |
3 |
2.8 |
200 |
314 |
150 |
5.4 |
Dane jednakowe dla trzech próbek.
C1[μF] |
R2[kΩ] |
1.5 |
200 |
V. WYNIKI POMIARÓW I ICH BŁĘDY.
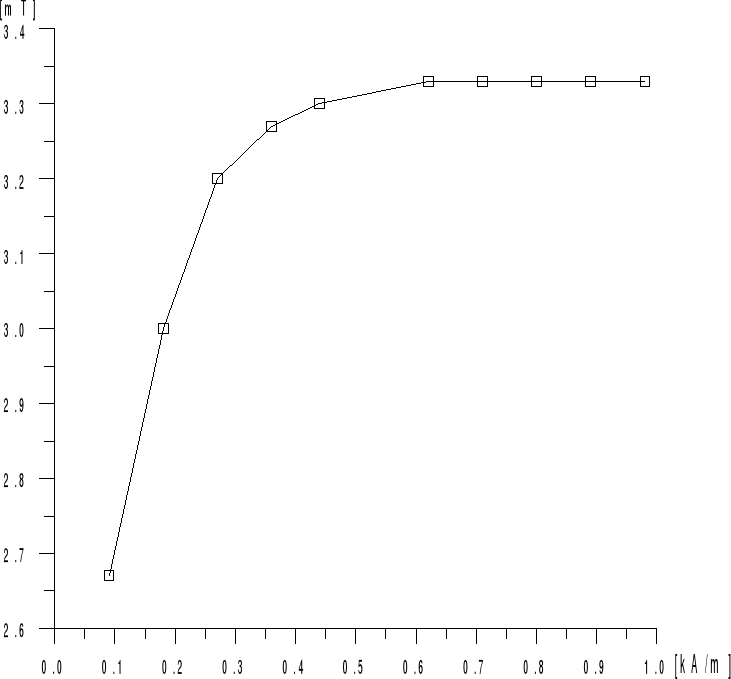
1. Płytka ferromagnetyczna nr 1.
a. Wyznaczanie pierwotnej krzywej rozmagnesowanej próby.
Zakres odczytu wartości na oscyloskopie |
|
x |
y |
2V/cm |
5mV/cm |
Wartości odczytane z ekranu oscyloskopu dla odpowiednich napięć.
Na ekran oscyloskopu naniesiony jest układ współrzędnych XY
Napięcie [V] |
X [cm] |
ΔX [cm] |
UX [V] |
ΔUX [V] |
Y [cm] |
ΔY [cm] |
UY [mV] |
ΔUY [mV] |
25 |
0.2 |
±0.2 |
0.4 |
±0.4 |
1.6 |
±0.2 |
8.0 |
±0.4 |
50 |
0.4 |
±0.2 |
0.8 |
±0.4 |
1.8 |
±0.2 |
9.0 |
±0.4 |
75 |
0.6 |
±0.2 |
1.2 |
±0.4 |
2.0 |
±0.2 |
10.0 |
±0.4 |
100 |
0.8 |
±0.2 |
1.6 |
±0.4 |
2.0 |
±0.2 |
10.0 |
±0.4 |
125 |
1.0 |
±0.2 |
2.0 |
±0.4 |
2.0 |
±0.2 |
10.0 |
±0.4 |
150 |
1.4 |
±0.2 |
2.8 |
±0.4 |
2.0 |
±0.2 |
10.0 |
±0.4 |
175 |
1.6 |
±0.2 |
3.2 |
±0.4 |
2.0 |
±0.2 |
10.0 |
±0.4 |
200 |
1.8 |
±0.2 |
3.6 |
±0.4 |
2.0 |
±0.2 |
10.0 |
±0.4 |
225 |
2.0 |
±0.2 |
4.0 |
±0.4 |
2.0 |
±0.2 |
10.0 |
±0.4 |
250 |
2.2 |
±0.2 |
4.4 |
±0.4 |
2.0 |
±0.2 |
10.0 |
±0.4 |
H [kA/m] |
ΔH [kA/m] |
ΔH/H x 100% |
B [mT] |
ΔB [mT] |
ΔB/B x 100% |
0.09 |
±0.09 |
100% |
2.67 |
±0.13 |
5% |
0.18 |
±0.09 |
50% |
3.00 |
±0.13 |
4% |
0.27 |
±0.09 |
33% |
3.33 |
±0.13 |
4% |
0.36 |
±0.09 |
25% |
3.33 |
±0.13 |
4% |
0.44 |
±0.09 |
20% |
3.33 |
±0.13 |
4% |
0.62 |
±0.09 |
14% |
3.33 |
±0.13 |
4% |
0.71 |
±0.09 |
13% |
3.33 |
±0.13 |
4% |
0.80 |
±0.09 |
11% |
3.33 |
±0.13 |
4% |
0.89 |
±0.09 |
10% |
3.33 |
±0.13 |
4% |
0.98 |
±0.09 |
9% |
3.33 |
±0.13 |
4% |
Wykres przedstawiający zależność B od H w próbce rozmagnesowanej.
b. Wyznaczenie pozostałości magnetycznej Br i pola koercji He.
Zakres odczytu wartości na oscyloskopie |
|
x |
y |
0.1V/cm |
2mV/cm |
Napięcie [V] |
X [cm] |
ΔX [cm] |
UX [V] |
ΔUX [V] |
Y [cm] |
ΔY [cm] |
UY [mV] |
ΔUY [mV] |
||||||
10 |
0.4 |
±0.2 |
0.04 |
±0.02 |
0.6 |
±0.2 |
1.2 |
±0.4 |
||||||
20 |
0.8 |
±0.2 |
0.08 |
±0.02 |
0.8 |
±0.2 |
1.6 |
±0.4 |
||||||
He [A/m] |
ΔHe [A/m] |
ΔHe/He x 100% |
Br [mT] |
ΔBr [mT] |
ΔBr/Br x 100% |
|||||||||
8.9 |
±8.9 |
100% |
0.40 |
±0.13 |
33% |
|||||||||
17.8 |
±8.9 |
50% |
0.50 |
±0.13 |
25% |
|||||||||
22.2 |
±8.9 |
40% |
0.80 |
±0.13 |
17% |
|||||||||
30 |
1.0 |
±0.2 |
0.10 |
±0.02 |
1.2 |
±0.2 |
2.4 |
±0.4 |
||||||
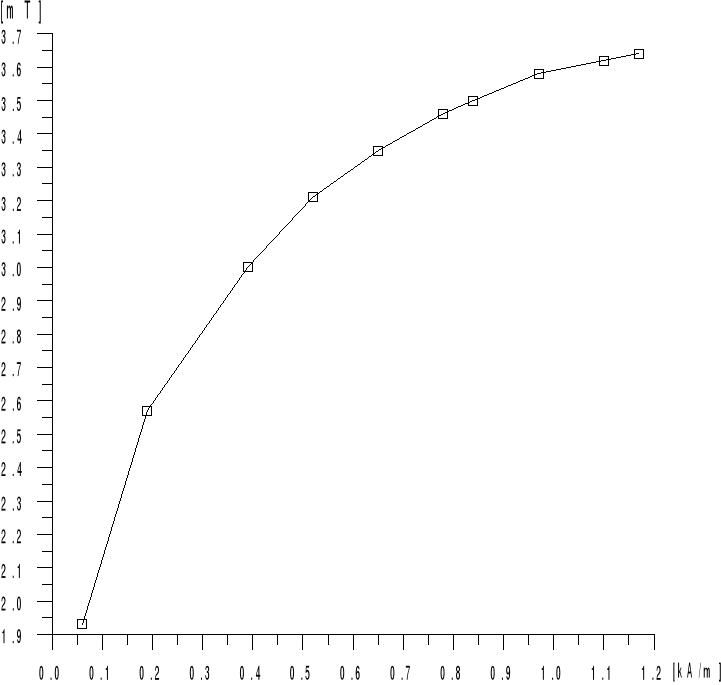
2. Płytka ferromagnetyczna nr 2.
a. Wyznaczanie pierwotnej krzywej rozmagnesowanej próby.
Zakres odczytu wartości na oscyloskopie |
|
x |
y |
1V/cm |
5mV/cm |
Wartości odczytane z ekranu oscyloskopu dla odpowiednich napięć.
Na ekran oscyloskopu naniesiony jest układ współrzędnych XY
Napięcie [V] |
X [cm] |
ΔX [cm] |
UX [V] |
ΔUX [V] |
Y [cm] |
ΔY [cm] |
UY [mV] |
ΔUY [mV] |
25 |
0.2 |
±0.2 |
0.2 |
±0.2 |
1.8 |
±0.2 |
9 |
±1 |
50 |
0.6 |
±0.2 |
0.6 |
±0.2 |
2.4 |
±0.2 |
12 |
±1 |
75 |
1.2 |
±0.2 |
1.2 |
±0.2 |
2.8 |
±0.2 |
14 |
±1 |
100 |
1.6 |
±0.2 |
1.6 |
±0.2 |
3.0 |
±0.2 |
15 |
±1 |
125 |
2.0 |
±0.2 |
2.0 |
±0.2 |
3.0 |
±0.2 |
15 |
±1 |
150 |
2.4 |
±0.2 |
2.4 |
±0.2 |
3.2 |
±0.2 |
16 |
±1 |
175 |
2.6 |
±0.2 |
2.6 |
±0.2 |
3.2 |
±0.2 |
16 |
±1 |
200 |
3.0 |
±0.2 |
3.0 |
±0.2 |
3.4 |
±0.2 |
17 |
±1 |
225 |
3.4 |
±0.2 |
3.4 |
±0.2 |
3.4 |
±0.2 |
17 |
±1 |
250 |
3.6 |
±0.2 |
3.6 |
±0.2 |
3.4 |
±0.2 |
17 |
±1 |
H [kA/m] |
ΔH [kA/m] |
ΔH/H x 100% |
B [mT] |
ΔB [mT] |
ΔB/B x 100% |
0.06 |
±0.06 |
100% |
1.93 |
±0.09 |
4% |
0.19 |
±0.06 |
33% |
2.57 |
±0.09 |
3% |
0.39 |
±0.06 |
17% |
3.00 |
±0.09 |
3% |
0.52 |
±0.06 |
13% |
3.21 |
±0.09 |
3% |
0.65 |
±0.06 |
10% |
3.30 |
±0.09 |
3% |
0.78 |
±0.06 |
8% |
3.43 |
±0.09 |
3% |
0.84 |
±0.06 |
8% |
3.50 |
±0.09 |
3% |
0.97 |
±0.06 |
7% |
3.60 |
±0.09 |
2% |
1.10 |
±0.06 |
6% |
3.64 |
±0.09 |
2% |
1.17 |
±0.06 |
6% |
3.64 |
±0.09 |
2% |
Wykres przedstawiający zależność B od H w próbce rozmagnesowanej.
b. Wyznaczenie pozostałości magnetycznej Br i pola koercji He.
Zakres odczytu wartości na oscyloskopie |
|
x |
y |
0.5V/cm |
5mV/cm |
Napięcie [V] |
X [cm] |
ΔX [cm] |
UX [V] |
ΔUX [V] |
Y [cm] |
ΔY [cm] |
UY [mV] |
ΔUY [mV] |
||||||
50 |
1.0 |
±0.2 |
0.5 |
±0.1 |
0.2 |
±0.2 |
1.0 |
±1 |
||||||
100 |
1.2 |
±0.2 |
0.6 |
±0.1 |
0.4 |
±0.2 |
2.0 |
±1 |
||||||
150 |
1.4 |
±0.2 |
0.7 |
±0.1 |
0.4 |
±0.2 |
2.0 |
±1 |
||||||
He [kA/m] |
ΔHe [kA/m] |
ΔHe/He x 100% |
Br [mT] |
ΔBr [mT] |
ΔBr/Br x 100% |
|||||||||
0.16 |
±0.03 |
20% |
0.21 |
±0.21 |
100% |
|||||||||
0.19 |
±0.03 |
17% |
0.33 |
±0.21 |
40% |
|||||||||
0.23 |
±0.03 |
14% |
0.43 |
±0.21 |
40% |
|||||||||
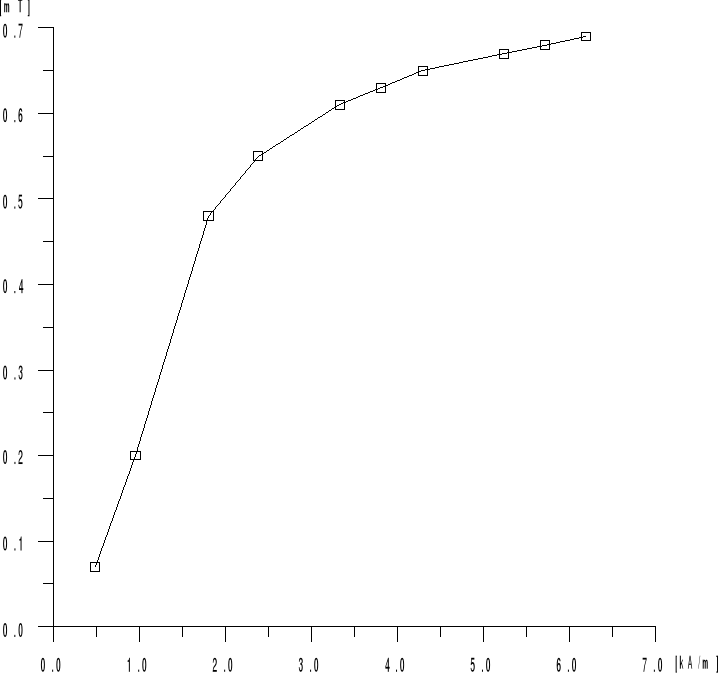
3. Płytka ferromagnetyczna nr 3.
a. Wyznaczanie pierwotnej krzywej rozmagnesowanej próby.
Zakres odczytu wartości na oscyloskopie |
|
x |
y |
5V/cm |
2mV/cm |
Wartości odczytane z ekranu oscyloskopu dla odpowiednich napięć.
Na ekran oscyloskopu naniesiony jest układ współrzędnych XY
Napięcie [V] |
X [cm] |
ΔX [cm] |
UX [V] |
ΔUX [V] |
Y [cm] |
ΔY [cm] |
UY [mV] |
ΔUY [mV] |
25 |
0.2 |
±0.2 |
1 |
±1 |
0.2 |
±0.2 |
0.4 |
±0.4 |
50 |
0.4 |
±0.2 |
2 |
±1 |
0.6 |
±0.2 |
1.2 |
±0.4 |
75 |
0.4 |
±0.2 |
2 |
±1 |
1.4 |
±0.2 |
2.8 |
±0.4 |
100 |
1 |
±0.2 |
5 |
±1 |
1.6 |
±0.2 |
3.2 |
±0.4 |
125 |
1.4 |
±0.2 |
7 |
±1 |
1.8 |
±0.2 |
3.6 |
±0.4 |
150 |
1.6 |
±0.2 |
8 |
±1 |
1.8 |
±0.2 |
3.6 |
±0.4 |
175 |
1.8 |
±0.2 |
9 |
±1 |
1.8 |
±0.2 |
3.6 |
±0.4 |
200 |
2.2 |
±0.2 |
11 |
±1 |
2.0 |
±0.2 |
4.0 |
±0.4 |
225 |
2.4 |
±0.2 |
12 |
±1 |
2.0 |
±0.2 |
4.0 |
±0.4 |
250 |
2.6 |
±0.2 |
13 |
±1 |
2.0 |
±0.2 |
4.0 |
±0.4 |
H [kA/m] |
ΔH [kA/m] |
ΔH/H x 100% |
B [mT] |
ΔB [mT] |
ΔB/B x 100% |
0.48 |
±0.48 |
100% |
0.07 |
±0.07 |
100% |
0.95 |
±0.48 |
50% |
0.20 |
±0.07 |
33% |
0.95 |
±0.48 |
50% |
0.48 |
±0.07 |
14% |
2.38 |
±0.48 |
20% |
0.55 |
±0.07 |
13% |
3.33 |
±0.48 |
14% |
0.61 |
±0.07 |
11% |
3.81 |
±0.48 |
13% |
0.61 |
±0.07 |
11% |
4.29 |
±0.48 |
11% |
0.61 |
±0.07 |
11% |
5.24 |
±0.48 |
9% |
0.68 |
±0.07 |
10% |
5.71 |
±0.48 |
8% |
0.68 |
±0.07 |
10% |
6.19 |
±0.48 |
8% |
0.68 |
±0.07 |
10% |
Wykres przedstawiający zależność B od H w próbce rozmagnesowanej.
b. Wyznaczenie pozostałości magnetycznej Br i pola koercji He.
Zakres odczytu wartości na oscyloskopie |
|
x |
y |
5V/cm |
2mV/cm |
Napięcie [V] |
X [cm] |
ΔX [cm] |
UX [V] |
ΔUX [V] |
Y [cm] |
ΔY [cm] |
UY [mV] |
ΔUY [mV] |
||||||
100 |
1.0 |
±0.2 |
5 |
±1 |
0.6 |
±0.2 |
3.0 |
±0.4 |
||||||
150 |
1.2 |
±0.2 |
6 |
±1 |
0.6 |
±0.2 |
3.0 |
±0.4 |
||||||
200 |
1.2 |
±0.2 |
6 |
±1 |
0.6 |
±0.2 |
3.0 |
±0.4 |
||||||
He [kA/m] |
ΔHe [A/m] |
ΔHe/He x 100% |
Br [mT] |
ΔBr [mT] |
ΔBr/Br x 100% |
|||||||||
2.38 |
±0.48 |
20% |
0.51 |
±0.07 |
13% |
|||||||||
2.86 |
±0.48 |
17% |
0.51 |
±0.07 |
13% |
|||||||||
2.86 |
±0.48 |
12% |
0.51 |
±0.07 |
13% |
|||||||||
VI. WNIOSKI I DYSKUSJA WYNIKÓW.
Wraz ze wzrostem średniej długości drogi magnetycznej oraz gdy spada opór w oporniku i maleje wartość przekroju poprzecznego zauważamy w powyższym ćwiczeniu, wzrost wartości pozostałości magnetycznej Br oraz wzrost pola koercji He. Tak więc największą pozostałością magnetyczną i pole koercji wykazuje próbka ferromagnetyczna nr.3 , a najmniejszą pozostałość magnetyczną i pole koercji ma próba nr.1. Największy wpływ na błąd popełniany przy wyznaczeniu pola koercji i pozostałości magnetycznej ma błąd popełniany przy odczycie wartości z ekranu oscyloskopu, można by ten błąd ograniczyć stosując oscyloskop z dokładniejszą podziałką na ekranie. Przy wyznaczeniu krzywej dla próbki rozmagnesowanej obserwujemy analizując próbki od 1 do 3 wzrost natężenia pola magnetycznego i spadek indukcji magnetycznej.
1
Wyszukiwarka