FIZYKA CIAŁA STAŁEGO
WYKŁADY
DYNAMIKA SWOBODNEGO PUNKTU MATERIALNEGO
Podstawowe równanie dynamiki zwane dynamicznym równaniem różniczkowym ruchu swobodnego punktu materialnego ma postać:
![]()
równanie ruchu punktu materialnego możemy zapisać w postaci wyrażenia wskazującego na zmienność siły
![]()
gdzie
![]()
- wektor wodzący, określający położenie punktu materialnego
![]()
- wektor prędkości
![]()
- czas w którym porusza się punkt materialny.
PIERWSZE ZADANIE DYNAMIKI (proste)
W pierwszym zadaniu mechaniki należy wyznaczyć wartość i kierunek wypadkowy sił działających na punkt materialny znając masę punktu i jego równania ruchu. Trzeba więc wyznaczyć przyśpieszenie, różniczkując względem czasu równania ruchu.
Jeżeli ruch punktu jest opisany wektorem, promieniem wodzącym
![]()
wówczas przyśpieszenie
![]()
według drugiego prawa Newtona siła działająca na omawiany punkt jest równa
![]()
w przypadku, gdy ruch punktu jest opisany we współrzędnych prostokątnych za pomocą równania skalarnego :
![]()
to rzut wypadkowej ![]()
wszystkich sił działających na punkt materialny wynoszą
![]()
ze wzorów:
![]()
![]()
obliczamy wartość i kierunek wypadkowej siły F.
DRUGIE ZADANIE DYNAKIKI (odwrotne)
Drugie zadanie dynamiki polega na wyznaczeniu równań ruchu punktu materialnego znając jego masę i działające siły.
Zadanie to sprowadza się do całkowania równań różniczkowych ruchu.
Jeżeli w chwili początkowej znane będzie położenie punktu i rzuty prędkości tego punktu to wtedy równania początkowe dla t=t0 są następujące
Siła ![]()
może być funkcją czasu t, położenia ![]()
i prędkości ![]()
punktu co możemy zapisać :
Zasada d'Alemberta dla punktu materialnego, zgodnie z drugim prawem Newtona ![]()
Możemy sprowadzić do postaci
![]()
Powyższe równanie możemy rozpatrywać jako warunek równowagi siły ![]()
przyłożonej do punktu materialnego M i wektora ![]()
będącego siłą fikcyjną.
Siłą bezwładności lub siłą d'Alemberta nazywamy fikcyjną siłę ![]()
, równą co do wartości iloczynowi masy i przyśpieszenia punktu materialnego lecz przeciwnie do tego przyśpieszenia skierowaną.
Siła d'Alemberta
Zasada d'Alemberta
Na punkt materialny M działają siły rzeczywiste, które w każdej chwili równoważą się z siłą bezwładności tego punktu.
Składowe siły bezwładności w prostokątnym układzie Oxyz wynoszą
![]()
Z równania ![]()
wynikają następujące równania różniczkowe ruchu punktu materialnego
![]()
BEZWŁADNOŚCIOWY UKŁAD ODNIESIENIA
Nazywany jest układem Galileusza, nieinercjalnym lub absolutnym
Jest to układ w którym obowiązują prawa Newtona. Parametry ruchu ciała ( prędkość, przyśpieszenie) zależą od układu odniesienia, względem którego będzie dany ruch obserwowany. Dlatego należy ustalić jaki układ możemy nazwać absolutnym.
W dynamice bezwładnościowy układ odniesienia ( układem, w którym obserwujemy prawa Newtona) będzie układ sztywno związany z Ziemią. Ponieważ wartość przyspieszenia kuli ziemskiej jest bardzo mała w porównaniu z wartością przyspieszenia grawitacyjnego.
Grawitacja
Galileusz jest postacią ściśle związaną z rozwojem mechaniki. Stwierdził, że wszystkie ciała materialne na Ziemi spadają z równym przyspieszeniem g. Czyli niezależnie od wielkości czy rodzaju ciała ![]()
. Wektor ![]()
jest zawsze skierowany do środka Ziemi i nazywany przyśpieszeniem ziemskim. Wartość tego przyśpieszenia zależy od wysokości nad poziomem morza i szerokości geograficznej miejsca na ziemi, w którym ciało spada.
Np. na biegunie g=9,83 m/s a na równiku g=9,78 m/s.
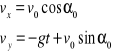
Przypadek rzutu ukośnego.
Równanie ruchu w układzie xy przyjmują postać

całkując je dwustronnie otrzymujemy
Stałe całkowania c1 i c2 wyznaczamy z warunków początkowych dla ciała t0=0
możemy zapisać, że
stałe całkowania c3 i c4 wyznaczamy z warunków początkowych dla t=0, x=0, y=0
- znajdujemy więc c3 =0 i c4=0
Równanie ruchu ciała
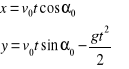
Równanie toru otrzymujemy po usunięciu z powyższych dwóch równań ruchu parametru t, a więc:
![]()
Torem ciała o masie M wyrzuconego pod kątem ![]()
do poziomu z prędkością ![]()
jest parabola o osi pionowej, zwrócona wypukłością w górę. Na podstawie równania toru znajdziemy zasięg rzutu, odległość na jaką spadnie ciało od miejsca, z którego został wyrzucony:
![]()
największa wysokość rzutu h, na którą wzniesie się ciało określimy ze wzoru:
![]()
PĘD PUNKTU MATERIALNEGO, ZASADA ZACHOWANIA PĘDU
Pędem lub ilością ruchu punktu materialnego M nazywam wektor, równy iloczynowi masy i prędkości, mający kierunek i zwrot prędkości.
![]()
Pęd - wektor skierowany wzdłuż stycznej do toru.
Dynamiczne równanie ruchu Newtona ![]()
może przyjąć nieco inną postać. Przyśpieszenie ![]()
punktu materialnego jest równe :
![]()
więc
![]()
Masa jest stała tzn. niezależna od czasu, zatem zgodnie z drugim prawem Newtona pochodna pędu wynosi:
![]()
z powyższego wynika, że pochodna pędu względem czasu rozpatrywanego punktu materialnego równa jest sumie sił działających na ten punkt.
Równanie ![]()
zapisujemy w postaci:
![]()
a następnie całkujemy w przedziale odpowiadającym czasom t2 i t1:

Jest to równanie wyrażające zasadę pędu punktu materialnego, zaś wyrażenie ![]()
nazywamy impulsem siły.
Zasada pędu punktu materialnego.
Geometryczny przyrost pędu w określonym przedziale czasu równa się popędowi sił działających w tym czasie.
Zasada zachowania pędu punktu materialnego.
Jeżeli na punkt materialny działa układ sił pozostający w równowadze, to pęd punktu materialnego jest wektorem stałym.
jeżeli ![]()
.
Zasada krętu punktu materialnego.
Pochodna względem czasu krętu ![]()
punktu materialnego, obliczonego względem nieruchomego bieguna O, jest równa momentowi wypadkowej sił działających na badany punkt materialny względem tego bieguna.
Kąt pomiędzy wektorem prędkości i wektorem pędu jest równy 0 czyli :
![]()
zatem
![]()
ponieważ iloczyn wektorowy ![]()
jest równy momentowi ![]()
wypadkowej siły ![]()
względem bieguna O to równanie ![]()
będzie wyrażać zasadę krętu punktu materialnego
![]()
W przypadku, gdy na punkt materialny działa suma geometryczna sił czynnych i reakcji to moment jest równy sumie geometrycznej momentów tych sił
![]()
Zasada zachowania krętu punktu materialnego
Jeżeli moment wypadkowej sił punktu materialnego względem dowolnego bieguna O jest równy zero, to kręt punktu materialnego względem tego bieguna jest stały.
Czyli jeżeli
![]()
to
![]()
rzutując powyższe równanie na osie współrzędnych Ox, Oy, Oz otrzymujemy

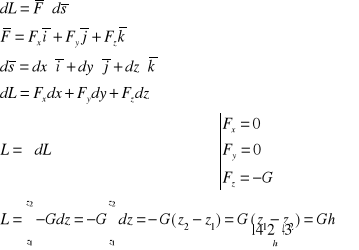
PRACA ELEMENTARNA
Pracą elementarną nazywamy iloczynem skalarnym siły ![]()
działającej na punkt materialny M, który przemieszcza się w dowolny sposób po torze od punktu A do B
![]()
gdzie F - wartość siły ![]()
ds - przemieszczenie, przyrost współrzędnej łukowej
![]()
- kąt między kierunkiem siły ![]()
i wektorem stycznym do toru
Więc pracę zapisujemy
![]()
gdy
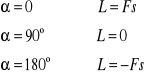
wynika z tego, że wartość pracy może być dodatnia lub ujemna.
Praca siły ciężkości działającej na punkty materialne jest iloczynem tej siły i różnicy poziomów położenia A i położenia B.
Punkt M pod wpływem siły ciężkości
Praca sił sprężystości
Na ciało wywołujące rozciąganie działa siła sprężyny ![]()
, której wydłużenie równe jest ![]()
. Siła ta jest równa
![]()
gdzie k - współczynnik proporcjonalności zwany stałą sprężyny.
praca elementarnej siły Fx na przemieszczeniu dx
![]()
praca siły Fx na skończonym przemieszczeniu ( od 0 do x1)
Praca w polu sił
Polem sił nazywamy przestrzeń na której znajduje się punkt materialny pod działaniem ściśle określonej siły zależnej tylko od położenia punktu.
Punkt materialny M poruszający się po torze AB
Praca punktu materialnego M zależy od toru po którym się porusza, przechodząc z położenia A do położenia B.
W celu określenia pola sił podajemy funkcje położenia:
Polem sił możemy nazwać linie charakteryzujące się tym, że są styczne w każdym punkcie do wektora siły
![]()
Jednorodne pole sił jest to pole, w którym linie pola sił są prostymi równoległymi, siły dla wszystkich punktów są stałe co do kierunku i wartości, czyli każdemu punktowi odpowiada taka sama siła ( np. pole ciężkości w pobliżu ziemi ).
Prace wykonaną przez pole sił wyliczymy ze wzoru

Pole potencjalne (zachowawcze)
To przestrzeń, w której działa siła ![]()
niezależna od toru, lecz od położenia początkowego i końcowego.
Potencjałem siły ![]()
jest funkcja trzech zmiennych, które określają wartość pracy zależnie od położenia początkowego i końcowego.
Jeżeli siła ![]()
zależy tylko od położenia i istnieje taka funkcja pola Φ (x, y, z)zwana potencjałem siły, że:
![]()
to pacę obliczamy ze wzoru:

Funkcję symetryczną do potencjału nazywamy energią potencjalną:
![]()
UKŁAD PUNKTÓW MATERIALNYCH
Układ punktów materialnych to zbiór punktów, którym przypisane są pewne masy. Położenia każdego punktu są zależne od położenia innych punktów, podobnie oddziaływania między nimi.
Rozróżniamy układy punktów swobodnych i nieswobodnych
Układ punktów swobodnych to układ punktów materialnych, który nie jest ograniczony więzami i zależny jest tylko od początkowych wartości i od oddziaływań.
Układ punktów nieswobodnych to układ punktów, których ruch jest ograniczony więzami.
Każdy punkt może być opisany za pomocą trzech współrzędnych.
W układzie punktów materialnych mamy do czynienia z siłami wewnętrznymi i zewnętrznymi.
Wszystkie siły wewnętrzne zgodnie z III zasadą Newtona tworzą w układzie układ sił przeciwnych. Zaś siły zewnętrzne są siłami czynnymi działającymi na punkty materialne danego układu, pochodzącymi od działania innego układu niewchodzącego w skład układu badanego.
Środek masy układu punktów materialnych
Położenie każdego punktu materialnego Ni o skupionej, skończonej masie Mi określa promień - wektor ![]()
poprowadzony z obranego bieguna.
Środkiem masy punktu o masie mn (nieskończonej) nazywamy punkt geometryczny c, którego wektor spełnia równanie:

gdzie, M=![]()
We współrzędnych kartezjańskich, rzutując powyższe równania wektorowe na osie otrzymujemy:



Momenty pierwszego rzędu (momenty statyczne) to:
![]()
; ![]()
; ![]()
xc, yc, zc - określają współrzędne środka masy
Zasada ruchu środka masy:
Środek masy układu punktów materialnych porusza się jak swobodny punkt materialny, w którym skupiona jest masa układu.
DYNAMIKA BRYŁY SZTYWNEJ
Moment bezwładności bryły sztywnej to granica, do której dąży suma iloczynów mas elementarnych kwadratu odległości tych elementów (mas) od osi.
![]()
![]()
- od osi 2
![]()
- od punktu O
![]()
- na płaszczyźnie OXY
TWIERDZENIE STEINERA
W XIX w. Szwajcarski matematyk udowodnił, że moment bezwładności ciała sztywnego względem dowolnej osi równy jest sumie momentów bezwładności względem osi przechodzącej przez środek masy oraz iloczynu masy ciała i kwadratu odległości między tymi dwiema osiami.
![]()
Tarcza
![]()
![]()
Pręt
![]()
; ![]()
DYNAMICZNE RÓWNANIA RUCHU BRYŁY SZTYWNEJ
Dynamiczne równania ruchu potęgowego bryły sztywnej
![]()
![]()
Dynamiczne równanie ruchu obrotowego
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Dynamiczne równanie ruchu płaskiego.
![]()
Dynamiczne równania ruchu płaskiego
![]()
Zad. 1 Korzystając z dynamicznych równań ruchu wyznaczyć przyspieszenie podnoszonego ciężaru o masie m1 znajdującego się na końcu linki przerzuconej przez krążek o promieniu r2 i masie m2 i zaczepionej do ciała trzeciego masie m3. Dany jest również współczynnik tarcia - f
![]()
![]()
I.
![]()
![]()
II.
![]()
![]()
III.
![]()
Równania więzów:
![]()
![]()
Energia kinetyczna b. szytwnej w ruchu postępowym
![]()
- wektor prędkości liniowej
![]()
Energia kinetyczna b. sztywnej w ruchu obrotowym
![]()
ω
Wartość prędkości dowolnego punktu ciała
![]()
gdzie:
![]()
ostatecznie:
![]()
Energia kinetyczna b. sztywnej w ruchu obrotowym równa jest połowie iloczynu momentu bezwładności bryły względem osi obrotu i kwadratu prędkości kątowej.
Energia kinetyczna b. sztywnej w ruchu płaskim
Tw. Younga
Energia kinetyczna w ruchu płaskim bryły sztywnej równa jest sumie energii kinetycznej b. sztywnej w ruchu postępowym środka masy i energii kinetycznej w ruchu obrotowym wokół osi przechodzącej przez środek masy i prostopadłej do płaszczyzny kierującej ruchu płaskiego.
![]()
Bryła sztywna w układzie płaskim.
![]()
moment bezwłądności bryły względem prostej przechodzącej przez środek masy ![]()
Energia kinetyczna w ruchu kulistym b. sztywnej.
Wyrażamy jako połowę iloczynu momentu bezwładności b. sztywnej względem chwilowej osi obrotu i kwadratu chwilowej prędkości kątowej.
![]()
Energia kinetyczna w ruchu dowolnym bryły sztywnej.
Ruch dowolny bryły sztywnej możemy rozważać jako ruch złożony z ruchu postępowego względem masy i ruchu wokół chwilowej osi obrotu.
![]()
Zasada równowartości energii kinetycznej i pracy bryły sztywnej.
Mówi ona, że przyrost energii kinetycznej bryły sztywnej na pewnym przesunięciu jest równy sumie prac sił zewnętrznych czynnych i reakcji na tym przesunięciu.
![]()
w chwili końcowej w chwili początkowej
Moc siły ![]()
Mocą siły nazywamy pracę wykonaną w ciągu jednostki czasu.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Moc chwilowa
![]()
przyrost pracy wykonany w tym czasie
![]()
![]()
określony przedział czasu
Moc w ruchu postępowym
Jeżeli w ruchu postępowym pracę dL zapiszemy jako ![]()
i podstawimy do wzoru na moc, wówczas moc tej siły wynosi:
![]()
Moc siły jest więc iloczynem skalarnym wektora siły F i wektora prędkości v punktu przyłożenia.
![]()
Jeżeli kierunek sił pokrywa się z kierunkiem prędkości to:
![]()
Moc siły w ruchu obrotowym
![]()
![]()
M
Tor punktu materialnego
![]()
![]()
h
l
x
V0
M
![]()
![]()
x
y
z
![]()
M
![]()
![]()
![]()
O
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
B
A
M
![]()
![]()
ds
x1
y1
x2
x2
z2
z1
![]()
B
M
A
z
y
x
A
A
![]()
X1
X
y
![]()
Siły zewnętrzne
Siły wewnętrzne
![]()
z
Mi
B
M
A
z
y
x
x
mn
![]()
![]()
![]()
Mc
![]()
![]()
![]()
y
x
z
y
x
z
Φ
r
Położenie dowolnego elementu bryły sztywnej
M
O
y
x
z
C
z1
d
O
m
r
y
x
z
z
l
C
m
O
z
y
x
![]()
![]()
![]()
![]()
A1
A2
C
Ac
![]()
![]()
dm
h
O
Z
x
y
z
![]()
C
![]()
![]()
![]()
α
m3
m1
T32
T23
T12
T21
III
II
I
Dane: m1, r2, m2, m3
T12
x
Kierunek ruchu ciała
![]()
m1g
m1
T21
T23
![]()
φ
α
x3
T32
R
m3a3
α
m3g
T
m3g*cosα
m3g*sinα
R= m3g*cosα=0
T = f*N = f* m3g*cosα
![]()
![]()
![]()
M1
![]()
M2
Ms
![]()
Mi
c
![]()
Mi
![]()
![]()
![]()
c
![]()
π
![]()
![]()
M
![]()
0
![]()
![]()
![]()
c
![]()
Wyszukiwarka