Biomechanika
Wykład 1, 2
Biomechanika
Fizjoterapia I rok sem.2 zajęcia z Biomechaniki
wykłady: dr hab. Jan Bilski ul. Kopernika 25 s. 5
Literatura
Biomechanika kliniczna. Podręcznik dla studentów medycyny i fizjoterapii - Janusz Wiesław Błaszczyk, PZWL 2008 (podstawowa (podstawowa)
Biomechanika układu ruchu człowieka -Tadeusz Bober Jerzy Zawadzki, Wydawnictwo BK , Wrocław 2003 (dodatkowa)
Biomechanika kliniczna - część ogólna - Zdzisław Zagrobelny; Marek Woźniewski AWF Wrocław, 2007 (dodatkowa)
Historia
Arystoteles (380 -322 p.n.e.)
De Motu Animalium
Pierwsza analiza chodu
„zwierzę poruszając się zmienia pozycję przez działanie (naciskanie) na podłoże, które jest pod nim".
Obserwacja, że podstawą ruchu w świecie zwierzęcym są interakcje biologiczna i mechaniczna.
Galen 129-201 n.e.
Galen (Claudius Galenus) De Motu Musculorum
Rozróznił neurony czuciowe i ruchowe, mięśnie synergistyczne i antagonistyczne
Opisał dodatni wpływ ćwiczeń fizycznych na rozwój ciała.
Usystematyzował wady postawy i jako pierwszy wprowadził terminy: scoliosis, kyphosis, lordosis.
Leonardo da Vinci 1452 - 1519
“Polo dell'omo” - Staw biodrowy
Zauważył on np. powiązanie rozpoczęcia ruchu przez człowieka z utratą równowagi lub zmianą położenia osi obrotu stopy w zależności od tego, czy biegniemy po terenie płaskim, pod górę czy w dół.
Giovanni Alfonso Borelli (1608 - 1679)
De Motu Animalium I , De Motu Animalium II
Autor znany przede wszystkim z pierwszych badań nad położeniem środka ciężkości u człowieka i zastosowania do tego celu dźwigni.
Emil Heinrich du Bois-Reymond (1818 - 1896)
Zastosowanie dźwigni jednostronnej do wyznaczenia położenia ogólnego środka ciężkości ciała na żywym człowieku.
Zwrócił on również uwagę na znaczenie oporu powietrza w biegu
Étienne-Jules Marey (1830-1904)
Marey, E.J. ANIMAL MECHANISM: A TREATISE ON TERRESTRIAL AND AERIAL LOCOMOTION
Francuski fizjolog i chronofotograf - wykazywał zainteresowanie ruchami człowieka i świata zwierzęcego -
konstruował oryginalne aparaty pomiarowe, w tym fotograficzne
Znane są „strzelba fotograficzna", chronofotograf, platforma do pomiaru siły reakcji podłoża, czujniki pneumatyczne w obuwiu i „bębenek Mareya", spełniający funkcję rejestratora.
Od Mareya pochodzą pierwsze kalkulacje pracy mechanicznej w chodzie, uwzględniające energię potrzebną do wznoszenia i opadania ciała, zachowania prędkości w ruchu postępowym i ruchu obrotowego, np, nogi podczas wymachu. Na podstawie tych obliczeń sformułował on zasadę minimum energii w lokomocji człowieka.
Eadweard Muybridge 1830 -1904
Eadweard Muybridge (Edward James Muggeridge) - Photographic analysis of animal and human locomotion
1877 - Eadweard Muybridge fotografuje fazy biegu konia za pomocą zbudowanego przez siebie systemu 12 i 24 kamer.
Konkluzja - kłusujący koń w pewnym momencie biegu odrywa od podłoża
Mikołaj Aleksandrowicz Bernstein (1896-1966)
Znany jest z prac nad sterowaniem ruchami i związkami między układem nerwowym i układem ruchu w procesie, który nazywamy koordynacją nerwowo-mięśniową.
Sir Archibald Vivian Hill (1886- 1977)
A.V. Hill opracował mechaniczną i strukturalną teorię mięśnia,
Jest znany z badania związku między siłą a prędkością skracania się mięśnia.
Opracował krzywą prędkości w biegu sprinterskim, zajmował się mechaniką biegu pod górę oraz biegiem jako przykładem ruchu, w którym ma miejsce maksymalny wysiłek mięśniowy.
Otrzymał w 1922 nagrodę Nobla
Muscular Activity (1926)
Muscular Movement in Man (1927)
Living Machinery (1927)
Hill, A.V. (1938). The heat of shortening and the dynamic constants of muscle. Proc. R. Soc, London B, 126, 136-195.
Hill, A.V.: The series elastic component of muscle, Proc. R. Soc. Lond. (Biol.) 137: 273-280, 1950.
Hill, A.V.: The mechanics of active muscles, Proc. R. Soc. Lond. (Biol.) 141:104-117, 1953.
Wallace Osgood Fenn (1893-1971)
W.O. Fenn, eksperymentując na izolowanych mięśniach, stwierdził wytwarzanie dodatkowego ciepła skurczu aktywnego mięśnia (ciepło aktywacji), co nazwano „efektem Fenna".
Dokonując analizy kinematycznej pracy, określił szacunkowo koszt energetyczny (metaboliczny) lokomocji.
Zagadnienia te opisane są w pracy Work against gravity and work due to velocity changes in running.
Wstęp
Biomechanika jest nauką zajmującą się siłami działającymi na układ biologiczny oraz skutkami tych oddziaływań.
Siłami działające na układ biologiczny
Siły, te mogą być wywołane działaniem zewnętrznym, powstają także wewnątrz układu.
Siły działające na człowieka z zewnątrz to przede wszystkim grawitacja; mogą one także pochodzić np. od osoby współćwiczącej.
Siłami czynnymi wewnątrz układu są siły generowane przez mięśnie szkieletowe.
Siła grawitacji
W biomechanice interesują nas wyniki oddziaływań na organizm człowieka sił zarówno generowanych wewnątrz organizmu, jak i powstających na skutek interakcji z otoczeniem.
Człowiek żyje w środowisku, w którym poddawany jest działaniu jednej stałej siły przyciągania ziemskiego.
Ma ona istotny wpływ na strukturę i funkcjonowanie całego organizmu, zwłaszcza układu ruchu.
Narząd ruchu człowieka musi dodatkowo, jak gdyby w tle całej swojej aktywności, wytwarzać siły równoważące przyciąganie ziemskie.
Siła ciężkości jest siłą masową działającą na poszczególne elementy ciała.
Siły wewnetrzne
Wewnętrznymi siłami są siły generowane przez mięśnie (stosując pojęcie z dziedziny mechaniki, możemy je nazwać siłownikami) działające w systemie kości - dźwigni i ich połączeń - stawów.
By owe mięśnie były siłownikami i wykonały pracę zewnętrzną, to po ich pobudzeniu przez układ nerwowy, czemu towarzyszy tzw. potencjał czynnościowy w mięśniu, dochodzi do wyzwolenia energii chemicznej, która zamienia się w mechaniczną przy pewnej stracie energii w postaci ciepła.
Od pobudzenia (nerwowego) do pracy mechanicznej;
impuls nerwowy wyzwala potencjał czynnościowy mięśnia => dochodzi do wyzwolenia energii chemicznej (procesy metaboliczne) => która jest zamieniana na pracę mechaniczną => towarzyszy temu wytworzenie energii cieplnej, której część jest rozpraszana
Potencjał ruchowy człowieka
Budowa ciała, w tym szczególnie układu ruchowego, tj. kości, stawów i mięśni, jego funkcje, zdolność do wyzwalania mocy, która jest iloczynem siły i prędkości, oraz proces sterowania ruchami to łącznie potencjał ruchowy człowieka.
Anatomia opisowa - zapoznajemy się z budową kości, ich kształtem, powierzchniami stawowymi i miejscami przyczepów mięśni.
Traktując szkielet jako część składową układu ruchu człowieka, to np. kość udową można traktować jak dźwignię podpartą w punkcie połączenia z miednicą za pośrednictwem stawu biodrowego.
Ów staw ma określoną ruchliwość, pozwalającą na wykonanie ruchów obrotowych uda w trzech osiach, którą opisujemy określoną klasą stawu.
Niezależnie od klasy, staw ma również pewien zakres ruchu wokół każdej osi, istotny z punktu widzenia analizy struktury ruchów.
Do takiej dźwigni w określonym miejscu przyłożona jest siła mięśnia, której położenie względem dźwigni wyznacza ramię siły.
Wiemy, że iloczynem wektorowym ramienia siły (r) i siły (F) jest moment siły (M).
To właśnie moment siły danego mięśnia może wywołać ruch obrotowy dźwigni.
Na tę dźwignię działa jednak także wiele innych mięśni oraz momenty sił zewnętrznych, np. grawitacja.
Ruch dźwigni - jego kierunek i prędkość - będzie efektem działania tych momentów sił.
Przedmiotem biomechaniki jest identyfikacja potencjału ruchowego człowieka
Efektem działania sił jest ruch, a ściślej - zgodnie z drugą zasadą dynamiki - zmiana ruchu.
Gdy siły, i momenty sił się równoważą ciało pozostaje w stanie równowagi.
Z takim stanem mamy do czynienia przy zachowaniu równowagi w postawie stojącej, w niektórych elementach ćwiczeń gimnastycznych, niektórych pozycjach startowych, np. na słupku startowym przed wyścigiem pływackim, bądź gdy chcemy lub musimy ustabilizować jakiś segment ciała, by stworzyć sztywny punkt podparcia, dający możliwość wykonania ruchu przez inny segment.
Gdy siły oraz momenty sił nie są w równowadze, zaczyna się ruch lub zmiana ruchu.
Głównymi atrybutami ruchu są droga i czas, a ich pochodne to prędkość i przyspieszenie.
Ruchy lokomocyjne człowieka
chód,
bieg
skok,
najbardziej naturalne i opanowane,
filogenetycznie najstarsze.
Na te ruchy nakładają się współczesne czynności robocze, sportowe, artystyczne czy ćwiczenia fizjoterapeutyczne (usprawniająco-lecznicze).
Można dokonywać podziału ruchów z uwagi na cel - produkcyjny, zabawowy, obronny lub usprawniający.
Przedmiotem biomechaniki jest identyfikacja i optymalizacja struktury ruchów człowieka
Biomechanika ma zastosowanie w:
wychowaniu fizycznym,
sporcie,
fizjoterapii
ergonomii
Podstawowymi naukami dla biomechaniki są:
mechanika (przyczyny ruchu i ich skutki muszą być opisane wiekościami fizycznymi),
anatomia, która opisuje strukturę układu kostno - mięśniowego,
fizjologia, która daje podstawę do interpretacji funkcji mięśni i procesów sterowania nimi przez układ nerwowy.
Biomechanika jest nauką interdyscyplinarną,
mając własny przedmiot badań oraz metody badawcze, łączy w sobie wiedzę z zakresu anatomii, fizjologii i fizyki,
Biomechanika inżynierska
Biomechanika inżynierska: zajmuje się studiami i modelowaniem ruchu, technikami pomiarowymi, manipulacją i lokomocją człowieka, badaniem postawy, właściwość mechanicznych i elektrycznych mięśni
Biomechanika medyczna
Biomechanika medyczna i inżynieria rehabilitacyjna zajmuje się głównie neurofizjologicznymi aspektami układu mięśniowo stawowego, elektromiografią, klinicznymi aspektami przepływu płynów biologicznych, funkcjonalna stymulacja elektryczna mięśni, nerwów kości, eliminacją bólów badaniem chodu patologicznego, implantami, metodami rehabilitacji
Biomechanika sportu
Biomechanika sportu: zajmuje się badaniem, modelowaniem ruchu zawodnika wykonującego różne ćwiczenia.
Główne płaszczyzny i osie jako układ odniesienia dla ruchów ciała i części ciała
Systematyka ruchów
W biomechanice stosuje się najczęściej układ prostokątny, złożony z trzech wzajemnie prostopadłych osi wyznaczających główne kierunki.
Układ ten pozwala na zdefiniowanie stosunków anatomicznych poszczególnych części ciała.
Punktem wyjścia do opisu ruchów człowieka i położenia poszczególnych części ciała jest standardowa pozycja anatomiczna
Postawa anatomiczna
Pomiar zakresu ruchu w stawach wymaga zdefiniowania kierunku ruchu.
W tym celu posługujemy się układem odniesienia względem ciała znajdującego się w postawie anatomicznej.
By precyzyjniej wyrażać się o wzajemnych stosunkach części ciała ludzkiego określono jednoznacznie tak zwaną pozycję anatomiczną.
Składają się na nią:
postawa stojąca
głowa i wzrok zwrócone ku przodowi
kończyny górne wyprostowane, ułożone wzdłuż tułowia,
z dłońmi skierowanymi ku przodowi (ułożenie supinacyjne)
palce rąk wyprostowane, kciuk przywiedziony
kończyny dolne wyprostowane,
stopy złączone razem powierzchniami przyśrodkowymi
palce stóp wyprostowane
Główne płaszczyzny i osie
Za układ odniesienia przyjmuje się:
trzy prostopadłe względem siebie płaszczyzny - dla ruchów postępowych,
trzy prostopadle biegnące do tych płaszczyzn osie, wokół których dokonują się ruchy obrotowe.
Istnieją następujące płaszczyzny ciała człowieka:
czołowa,
„równoległa do czoła”, która dzieli ciało na część przednią i tylną,
strzałkowa,
dzieląca ciało na część prawą i lewą,
poprzeczna,
która dzieli ciało na część górną i dolną.
Główne płaszczyzny
Strzałkowa S
Czołowa C
Poprzeczna P
Płaszczyzny te można poprowadzić względem każdej części ciała lub opisać nimi kierunki ruchów każdego segmentu ciała, przebiegające równolegle do płaszczyzn głównych.
Wszystkie ruchy stawowe i pozycje zapisuje się w tych trzech podstawowych płaszczyznach:
strzałkowej (sagittal plane),
czołowej (frontal or coronal plane)
poprzecznej (transverse or axial plane).
Wszystkie ruchy proste lub złożone trójwymiarowe są sprowadzane do ruchów w tych podstawowych płaszczyznach, aby ułatwić ich zapis.
Są one zatem zapisywane symbolami S, F, T, z wyjątkiem ruchów rotacyjnych, dla których symbolem jest litera R.
Wszystkie ruchy zapisuje się trzema liczbami przedstawiającymi liczbę stopni ruchu kątowego.
Ruchy obrotowe w stawach wykonywane są względem osi obrotu.
Główne osie centralne mają również swoje nazwy i przebiegają prostopadle do wymienionych wyżej płaszczyzn.
np. oś długa ciała jest prostopadła do płaszczyzny poprzecznej,
oś strzałkowa - do płaszczyzny czołowej,
oś poprzeczna - do płaszczyzny strzałkowej.
Formy pracy mięśniowej
Podstawowe pojęcia
Podstawą określenia form pracy mięśniowej w stawach jest jej następująca klasyfikacja:
Praca statyczna
oparta na skurczu izometrycznym
Praca dynamiczna
oparta na skurczu auksotonicznym
Praca statyczna może występować jako:
stabilizująca (ustalająca)
gdy na stawy działają siły na ściskanie,
wzmacniająca
gdy na stawy działają siły na rozciąganie,
utrzymująca
gdy w stawach powstają momenty obrotowe pochodzące od sił zewnętrznych.
Praca dynamiczna - może występować jako:
koncentryczna
gdy mięsień kurcząc się jest napędem ruchu (moment siły mięśni jest większy od momentu oporu) ,
ekscentryczna
gdy rozciągany mięsień hamuje ruch (moment siły jest mniejszy od momentu oporu).
Podstawowe pojęcia - akton mięśniowy
Jednostką funkcjonalną mięśni w biomechanice jest akton mięśniowy.
Akton mięśniowy - jest to część, zespół lub całość mięsni o jednakowym lub bardzo zbliżonym przebiegu włókien, daje mu to możliwość wykonywania samodzielnej, jednakowej funkcji względem osi stawu nad którym przebiega.
Aktony mięśniowe mogą wykonywać w stawach sześć różnych funkcji:
w płaszczyźnie strzałkowej - zginania i prostowania,
w płaszczyźnie czołowej - odwodzenia i przywodzenia,
w płaszczyźnie poprzecznej - nawracania (pronacji) lub rotacji wewnętrznej i odwracania (supinacji) lub rotacji zewnętrznej.
Aktony wykonujące funkcję zginania są nazywane zginaczami.
Analogicznie używane są określenia: prostowniki, odwodziciele, przywodziciele, pronatory (lub rotatory wewnętrzne) i supinatory (lub rotatory zewnętrzne).
Zginanie
Zginanie należy traktować jako zmianę kąta stawowego pomiędzy poszczególnymi częściami ciała w płaszczyźnie strzałkowej w stosunku do pozycji wyjściowej w postawie zasadniczej - tzw. „neutralnego zera”.
Prostowanie
Prostowanie jest ruchem powrotnym - do pozycji wyjściowej.
Zarówno zginanie i prostowanie wymagają w większości przypadków aktywności mięśniowej lub zadziałania sił zewnętrznych.
Wyjątki - zgięcie podeszwowe i grzbietowe stopy
w trakcie których następuje gromadzenie energii potencjalnej sprężystej w więzadłach i torebce stawowej stawu skokowego, a także w ścięgnach i strukturach łącznotkankowych aktonów wykonujących funkcję prostowania w stawie;
dzięki tej energii, siła reakcji więzów stawu skokowego powoduje ruch stopy w kierunku jej pozycji wyjściowej.
Odwodzenie
Odwodzenie należy traktować jako zmianę kąta stawowego pomiędzy poszczególnymi częściami ciała w płaszczyźnie czołowej w stosunku do pozycji wyjściowej.
Przywodzenie
Przywodzenie jest ruchem powrotnym do pozycji wyjściowej.
Zarówno odwodzenie i przywodzenie wymagają aktywności mięśniowej lub zadziałania sił zewnętrznych.
Wyjątek - odwodzenie przyśrodkowe ręki, w trakcie którego powstaje duże naprężenie więzadeł, torebki stawowej oraz ścięgien i struktur łącznotkankowych aktonów wykonujących funkcję przywodzenia w stawie.
Nawracanie
Nawracanie lub rotacja wewnętrzna jest ruchem w płaszczyźnie poprzecznej zmieniającym położenie części ciała z pozycji neutralnego zera w kierunku „do środka”.
Nawracanie wymaga aktywności mięśniowej lub sił zewnętrznych.
Powrót do pozycji wyjściowej odbywa się dzięki sile reakcji więzów, które gromadzą energię potencjalną sprężystą w więzadłach, torebkach stawowych, a także ścięgnach i włóknach mięśniowych aktonów wykonujących odwracanie w tym samym stawie.
Odwracanie
Odwracanie lub rotacja zewnętrzna jest ruchem w płaszczyźnie poprzecznej zmieniającym położenie części ciała z pozycji neutralnego zera w kierunku „od środka”.
Odwracanie wymaga aktywności mięśniowej lub sił zewnętrznych.
Powrót do pozycji wyjściowej odbywa się dzięki sile reakcji więzów, które podobnie jak w przypadku nawracania gromadzą energię potencjalną sprężystą w odpowiednich strukturach.
Organizacja czynnościowa układu ruchu
Narząd ruchu można podzielić na dwie podstawowe części.
Pierwsza - system szkieletowy stanowiący konstrukcję nośną oraz zespół dźwigni napędowych połączonych stawami.
Druga - mięśnie będące właściwym systemem napędowym organizmu.
Działanie układu mięśniowego, a tym samym aktywność ruchowa całego organizmu, kontrolowana jest przez układ nerwowy.
Ruchy czynne są wykonywane dzięki skurczom mięśni, które powodują wzajemne przemieszczanie się części szkieletu, połączonych z sobą za pomocą stawów i więzadeł.
Połączenia te na ogół tworzą dźwignie jednoramienne z punktem podparcia w stawie.
Mięśnie są połączone z kośćmi za pomocą ścięgien, które, podobnie jak więzadła, są zbudowane z mocnych pasm tkanki łącznej, głównie z włókien kolagenowych.
Skurcze mięśni powodują ruch obrotowy dźwigni.
W zależności od budowy stawów ruch ten odbywa się w:
jednej (stawy jednoosiowe),
dwu (stawy dwuosiowe),
wielu (stawy wieloosiowe) płaszczyznach.
Zakres ruchu determinują:
kształt podstawowych części kostnych stawu (głowy i panewki),
układ więzadeł łączących je oraz rozmieszczenie
siła mięśni związanych z danym stawem.
ŁAŃCUCH KINEMATYCZNY
Ruchy złożone obejmują kilka stawów tworząc tak zwany łańcuch kinematyczny, w którym siły wywierane przez mięśnie na poszczególne dźwignie kostne podlegają sumowaniu przestrzennemu.
Łańcuch kinematyczny - część mechanizmu w postaci kilku połączonych ze sobą członów tworzących jedną lub wiele par kinematycznych, realizujący zdefiniowane przeniesienie ruchu.
Podstawową cechą łańcucha kinematycznego jest jego ruchliwość.
Ruchliwość określa ile stopni swobody posiada łańcuch, to znaczy ile różnych typów ruchu jest w stanie przenieść.
Para kinematyczna to połączenie ruchowe dwóch członów mechanizmu.
Para kinematyczna odbiera część stopni swobody członom przez nią związanym.
Pary kinematyczne dzieli się na klasy w zależności od ilości więzów (dobranych stopni swobody) oraz w zależności od tego jakie rodzaju ruchu są przez parę dopuszczane lub ograniczane.
Pojęcie łańcucha kinematycznego wprowadził w 1875 roku twórca współczesnej kinematyki maszyn, F. Reuleux.
Opisał go jako mechaniczny system ogniw w inżynierii.
Łańcuch kinematyczny jest zwykle zamkniętym systemem ogniw połączonych razem w taki sposób, że ruch jednego ogniwa przy ustabilizowanym innym powoduje ruch pozostałych ogniw w przewidywalny sposób.
W biomechanice zespół funkcjonalny połączonych ze sobą segmentów nosi nazwę łańcucha kinematycznego.
W zależności od realizowanego programu ruchowego łańcuch kinematyczny może składać się z dwóch lub więcej członów obejmujących swym zasięgiem nawet całe ciało.
Każdy łańcuch kinematyczny ma określoną „swobodę" transformacji prostych przemieszczeń kątowych w poszczególnych stawach w złożone ruchy przestrzenne.
Tę zdolność można ocenić, posługując się pojęciem stopni swobody łańcucha kinematycznego.
Koncepcja stopni swobody łańcuchów kinematycznych została wprowadzona pod koniec XIX wieku przez Reuleaux (1875 r).
Według jego koncepcji każdy staw, czyli połączenie dwóch kolejnych segmentów łańcucha, można scharakteryzować na podstawie liczby niezależnych płaszczyzn, w których może odbywać się ruch.
Do kinezjologii człowieka koncepcję łańcucha kinematycznego wprowadził A. Steindler w 1955 roku i zdefiniował go jako:
kombinację kilku kolejno rozmieszczonych stawów stanowiących kompleksowy układ ruchu.
Steindler podzielił łańcuchy kinematyczne na:
otwarte
zamknięte
Otwarty łańcuch kinematyczny to łańcuch, w którym końcowe ogniwo jest swobodne i łączy się tylko z jednym, sąsiednim ogniwem.
Ruchy ogniw są niezależne od siebie
Ciało człowieka składa się głównie z otwartych łańcuchów kinematycznych, gdyż ogniwa końcowe (stopa i ręka) pozostają wolne.
W ciele człowieka można wyodrębnić dwa zamknięte łańcuchy kinematyczne.
Jednym z nich jest klatka piersiowa i wszystkie jej struktury ruchowe zaangażowane w proces oddychania.
Ruchy żeber wymuszają określone ruchy mostka i kręgosłupa piersiowego i odwrotnie.
Wymienia się 56 stawów sprzężonych, które współdziałają przy ruchach całej klatki.
Drugim takim łańcuchem kinematycznym wydaje się być miednica, gdzie śladowa ruchomość w stawach krzyżowobiodrowych powoduje przy ruchu w jednym z tych stawów określony ruch drugiego.
Ruchy każdego człowieka są kombinacją ruchów w zamkniętych i otwartych łańcuchach kinematycznych.
W przypadku normalnego chodu stosunek wynosi 65% do 35%.
W miarę wzrostu prędkości poruszania procentowy udział ruchów w zamkniętym łańcuchu kinematycznym znacząco maleje (by podczas sprintu osiągnąć 10%).
Otwarty łańcuch kinematyczny można opisać jako izolowany ruch w jednym stawie, którego część dystalna porusza się swobodnie w przestrzeni, a siła wytwarzana przez ciało jest na tyle duża by pokonać opór.
Ćwiczenia w otwartych łańcuchach kinematycznych charakteryzują się większą prędkością i swobodą ruchu, a mniejszą stabilnością.
Zamknięty łańcuch kinematyczny można opisać jako określony ruch wielostawowy, w którym dystalny segment jest ustabilizowany, lub napotyka duży opór, który ten ruch uniemożliwia czy w znacznym stopniu ogranicza.
Siła wytwarzana przez ciało nie jest wystarczająca by pokonać ten opór.
Zespoły mięśniowe pracują odwrotnie - przyczep końcowy staje się początkowym, a początkowy końcowym.
Wymusza to inną koordynacje nerwowo-mięśniową.
Przykładem takiej odwróconej pracy mięśni jest praca zapasowych mięśni wdechowych po zbyt intensywnym wysiłku, kiedy nie wystarcza praca samej przepony i mięśni ją wspomagających.
Warunkiem włączenia się tych mięśni w proces oddychania jest zamknięcie łańcucha kinematycznego i ustabilizowanie kończyn górnych poprzez oparcie ich na kolanach lub uchwycenie jakiegoś stabilnego przedmiotu.
Ciała mogą oddziaływać siłami na inne ciała na dwa sposoby: na odległość (za pomocą pól) lub bezpośrednio (przez kontakt).
W przypadku ciała człowieka w pierwszy sposób działa na nie kula ziemska i urządzenia emitujące pola elektromagnetyczne.
W drugim przypadku mamy najczęściej do czynienia z różnego rodzaju mechanizmami lub biomechanizmami.
Wszelkiego rodzaju dźwignie przenoszą siły poprzez ruch obrotowy.
Złożenie ruchu postępowego i obrotowego umożliwia przenoszenie sił ruchem śrubowym.
Każdy mechanizm składa się z co najmniej dwóch członów sztywnych i połączenia ruchowego pomiędzy nimi.
Tworzą one razem parę kinematyczną.
W zależności od rodzaju przenoszonego ruchu wyróżnia się pary kinematyczne:
postępowe,
obrotowe
śrubowe
Pary kinematyczne charakteryzuje klasa połączenia uzależniona od ilości stopni swobody ruchów.
Stopień swobody jest niezależnym kierunkiem, w którym może przemieszczać się dany człon.
Człon swobodny czyli nie połączony z żadnym innym członem w parę kinematyczną, ma 6 stopni swobody - może poruszać się:
w górę lub w dół,
do przodu lub do tyłu,
w lewo lub w prawo
obroty wokół osi pionowej,
obroty do wokół osi poziomej,
obroty wokół osi poprzecznej
Para kinematyczna: piłka-podłoże posiada tylko 5 stopni swobody - ruch piłki w górę spowodowałby zerwanie połączenia.
Parze tej został zatem odjęty jeden stopień swobody - mówimy, że jest to para I klasy.
Zatem klasa pary kinematycznej jest liczbą odjętych stopni swobody.
Ciąg par kinematycznych połączonych ze sobą ruchowo tworzą łańcuch kinematyczny.
Jeden z członów łańcucha kinematycznego jest zawsze związany z jakimś względnie stabilnym układem odniesienia, względem którego odbywa się ruch.
Człon taki stanowi podstawę łańcucha kinematycznego.
Każdy łańcuch kinematyczny charakteryzuje się pewną określoną ruchliwością
Ruchliwość łańcucha kinematycznego jest łączną liczbą stopni swobody względem podstawy i jest obliczana ze wzoru:

Stawy jednoosiowe umożliwiają ruch tylko w jednej płaszczyźnie i dlatego mówi się, że mają jeden stopień swobody.
Przykładem połączeń o jednym stopniu swobody są stawy międzypaliczkowe i staw łokciowy.
W stawach tych możliwy jest tylko ruch zginania i prostowania.
Jeśli staw ma dwie osie ruchu, istnieją dwie niezależne płaszczyzny, w których może zostać wykonany ruch.
Taki staw ma więc dwa stopnie swobody.
Przykładem połączenia międzysegmetalnego o dwóch stopniach swobody jest staw promieniowo-nadgarstkowy.
Pozwala na ruchy zginania i prostowania wokół osi poprzecznej oraz ruchy przywodzenia i odwodzenia wokół osi strzałkowej.
Stawy kulisto-panewkowe np. jest staw biodrowy, umożliwiają niezależne ruchy:
prostowania i zginania,
odwodzenia i przywodzenia,
rotacje.
Ruchy mogą być wykonywane w trzech niezależnych płaszczyznach, czyli taki staw ma trzy stopnie swobody.
Staw ramienny jest kolejnym przykładem połączenia o trzech stopniach swobody.
W stawach o dwóch i trzech stopniach swobody możliwe jest wykonywanie ruchów okrężnych.
W czasie takiego ruchu dalszy segment może się przemieszczać po powierzchni stożka, którego wierzchołek wyznacza punkt przecięcia osi stawowych.
Liczba stopni swobody dla pojedynczego stawu nie może być większa od trzech.
Sumowanie stopni swobody kilku stawów - układ ruchowy osiąga liczbę stopni swobody łańcuchów kinematycznych, niezbędną do realizacji dowolnie skomplikowanych ruchów przestrzennych.
Wraz ze wzrostem liczby stopni swobody łańcucha kinematycznego zwiększa się jego „swoboda" ruchu, co pozwala na realizację bardzo złożonych wzorców ruchu.
Poszczególne programy ruchowe mogą być zrealizowane różnymi sposobami, co nadaje im indywidualny charakter.
Nadmiar stopni swobody w układzie ruchowym człowieka - ważne implikacje funkcjonalne i kliniczne.
Aktywność takiego układu - bardzo rozbudowany
Układ sterowania - spowolnienie jego działanie.
Aspekt kliniczny - nadmiarowość pozwala na kompensowanie niedoborów powstałych w układzie ruchowym na skutek niewydolności funkcjonalnej lub zmian patologicznych.
Osoba ze sztywnym kolanem może sprawnie chodzić, kompensując upośledzenie dodatkowymi ruchami w sąsiednich stawach: skokowym i biodrowym.
Deficyt wywołany sztywnością kolana jest także kompensowany przez dodatkowe ruchy tułowia czy drugiej kończyny.
Ceną kompensacji jest zwiększenie wydatku energetycznego oraz dodatkowe obciążenie pozostałych stawów.
Bernstein (1935 r.) - sterowanie ruchem opiera się na zasadzie redukcji stopni swobody łańcuchów kinematycznych.
Układ nerwowy, zamiast niezależnego sterowania aktywnością poszczególnych mięśni czy stawów, posługuje się raczej sterowaniem modułowym nakierowanym na całe łańcuchy kinematyczne.
W złożonym łańcuchu kinematycznym pojedyncze stopnie swobody nie mają większego znaczenia.
Uwaga - zdarza się jednak, że nawet utrata tylko jednego stopnia swobody może powodować upośledzenie ruchowe uniemożliwiające wykonywanie zawodu.
Ma to na przykład miejsce przy uszkodzeniach stawu międzypaliczkowego u pianistów.
Hipoteza Bernsteina - efektywny szybki ruch jest możliwy dzięki sterowaniu modułowemu.
Największe znaczenie ma redukcja stopni swobody na poziomie samego systemu sterowania ruchem ( układu nerwowego).
Płynne i skoordynowane ruchy możliwe są dzięki synergiom ruchowym, czyli zakodowanym w OUN złożonym programom ruchowym.
rogramy te pozwalają na sterowanie ruchem kończyn lub nawet ruchem całego ciała, które traktowane jest jako jeden zespół funkcjonalny.
Szybkość tego złożonego i zorganizowanego hierarchicznie systemu jest niewystarczająca, gdy zostaje on zmuszony do niezależnego sterowania ruchem już na poziomie funkcjonalnych grup mięśniowych.
Na takie ograniczenia napotykamy podczas nabywania nowych umiejętności ruchowych.
Łańcuchem kinematycznym (biokinematycznym) określa się spójny zespół członów połączonych w pary kinematyczne, lub biokinematyczne .
Para kinematyczna to ruchowe połączenie dwóch lub więcej członów wzajemnie ograniczające ich ruchy względne .
Człon to sztywny element ciała ludzkiego w postaci kości.
Ruchliwość łańcucha kinematycznego będzie określać liczba stopni swobody tego łańcucha względem podstawy, którą jest człon stanowiący nieruchomy układ odniesienia np. dla kończyny dolnej miednica.
Liczbą stopni swobody ciała sztywnego nazywa się liczbę niezależnych współrzędnych określających jednoznacznie jego położenie w przestrzeni względem wybranego układu odniesienia.
Swobodny człon sztywny zawieszony w przestrzeni posiada 6 stopni swobody ruchu: trzy ruchy postępowe wzdłuż osi x, y, z i trzy obrotowe wokół tych samych osi .
Stopień swobody to niezależny ruch względny członów w stawie.
Człowiek posiada stawy o maksymalnie trzech stopniach swobody ruchu, np. staw ramienny lub biodrowy, gdzie kość ramienna, czy udowa łączy się z panewką w jednym końcu.
Łańcuchy kinematyczne dzielimy na otwarte i zamknięte.
Otwarty łańcuch kinematyczny to łańcuch, w którym końcowe ogniwo jest swobodne i łączy się tylko z jednym, sąsiednim ogniwem.
Ruchy ogniw są niezależne od siebie i chociaż jeden z członów nie wchodzi w pełne połączenie z innymi
Zamknięty łańcuch kinematyczny to łańcuch, w którym końcowe ogniwo nie jest swobodne.
Ruch jednego ogniwa powoduje określony ruch innych ogniw, a każdy jego człon jest połączony co najmniej z dwoma innymi członami
Szkielet człowieka jako biomechanizm
Szkielet człowieka odpowiada wszelkim regułom budowy mechanizmów, może więc być traktowany jako biomechanizm.
Rolę członów sztywnych pełnią w tym przypadku kości, a połączeń ruchowych stawy - razem tworzą pary biokinematyczne.
W obrębie całego szkieletu człowieka jest w sumie 148 członów ruchomych i 147 połączeń.
W przypadku par biokinematycznych można mówić jedynie o trzech stopniach swobody, ponieważ w stawach możliwe są jedynie ruchy obrotowe.
Minimalne przemieszczenia liniowe kości względem siebie w trakcie ruchu traktowane są jako luzy i nie są brane pod uwagę podczas określania klasy połączeń.
W związku z tym każda para biokinematyczna ma automatycznie odjęte trzy (liniowe) stopnie swobody i w obrębie szkieletu mogą występować jedynie połączenia:
III klasy - o trzech stopniach swobody, np. stawy: biodrowy i ramienny - łącznie 29 połączeń w całym szkielecie,
IV klasy - o dwóch stopniach swobody, np. staw promieniowo-nadgarstkowy - łącznie 33 połączenia,
V klasy - o jednym stopniu swobody, np. stawy międzypaliczkowe - łącznie 85 połączeń.
Odpowiednikiem łańcuchów kinematycznych w mechanizmach są w szkielecie człowieka łańcuchy biokinematyczne, będące spójnym ciągiem połączonych ze sobą ruchowo kości.
Przykładami łańcuchów biokinematycznych są: kręgosłup lub jego odcinki, kończyny, tułów, stopy, ręce, palce.
Szczególnym przykładem łańcucha biokinematycznego jest cały szkielet człowieka.
Łańcuchy biokinematyczne też mogą być otwarte lub zamknięte.
Otwarty łańcuch biokinematyczny występuje wtedy, gdy ostatni człon jest swobodny - w takim łańcuchu biokinematycznym możliwy jest do wykonania ruch w każdym z połączeń osobno.
W zamkniętym łańcuchu biokinematycznym zarówno pierwszy, jak i ostatni człon nie mają swobody ruchu; są związane z jakimś względnie stabilnym układem odniesienia (podłoże, inna część ciała).
Łańcuchy biokinematyczne mogą być zamknięte bezpośrednio lub pośrednio.
Łańcuch biokinematyczny jest zamknięty bezpośrednio, gdy elementem zamykającym jest inna część ciała, np. stopy w skłonie w przód z chwytem za kostki.
Pośrednio zamknięty łańcuch biokinematyczny występuje, gdy elementem zamykającym jest element pośredni, np.: podłoże, przyrząd.
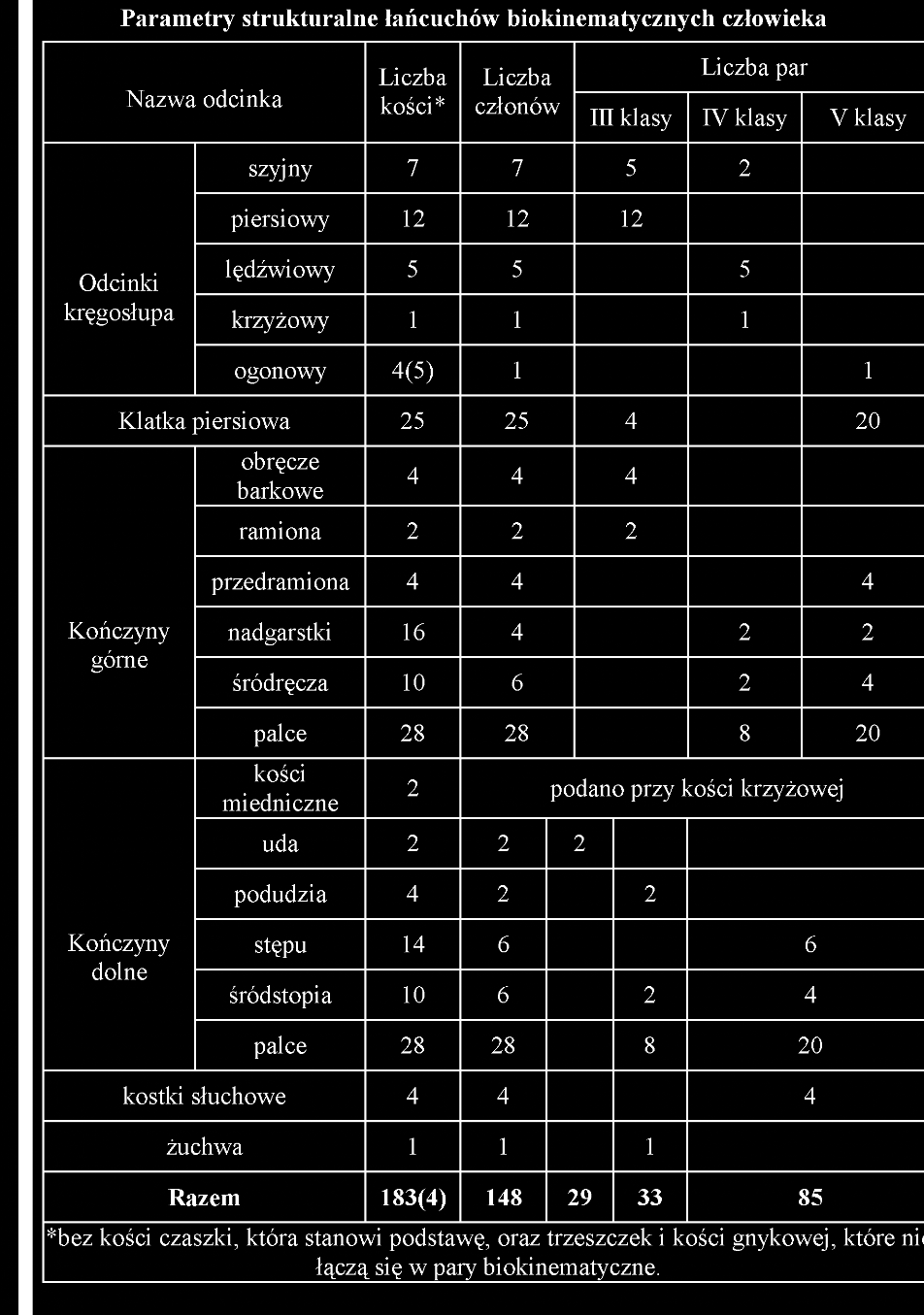
Ruchliwość łańcuchów biokinematycznych oblicza się tak samo jak w przypadku innych mechanizmów z tym że sumowanie odbywa się tylko od 3 do 5 klasy połączenia.
Biorąc pod uwagę podane wcześniej liczby członów ruchomych i połączeń poszczególnych klas, można obliczyć ruchliwość szkieletu jako:
Uzyskana liczba 244 stopni swobody jest największą wartością dla jakiegokolwiek biomechanizmu lub mechanizmu stworzonego przez człowieka.
Rysunek 1 Schemat strukturalny szkieletu człowieka
Na rysunku przedstawiono schemat strukturalny biernego układu ruchu człowieka, potraktowanego jako łańcuch biokinematyczny.
Składa się on ze 144 członów ruchomych (względem podstawy: czaszki), połączonych w 143 pary kinematyczne o ruchliwości: 3 st. sw. czyli III klasy (29 par), 2 st. sw. czyli IV (33 pary) i 1 st. sw. czyli V klasy (81 par).
Kończyna górna człowieka, składa się z 22 członów ruchomych (względem łopatki) tworzących 22 pary o ruchliwości 3 st. sw. (jedna para III klasy), 2 st. sw. (sześć par klasy IV) i 1 st. sw. (15 par klasy V).
Ruchliwość kończyny wynosi zatem: WK= 6 • 22 - (3 -1 + 4 • 6 + 5 • 15) = 132 - (3 + 24 + 75) = 132 - 102 = 30 st. sw.
Rysunek 2 Schemat strukturalny kończyny górnej człowieka
Pytania
Klasyfikacja sił działających na aparat ruchu człowieka.
Charakterystyka postawy anatomicznej człowieka
Główne płaszczyzny i osie jako układ odniesienia dla ruchów ciała i części ciała
Wyszukiwarka