POLITECHNIKA RADOMSKA Laboratorium: Napędy i sterowanie hydrauliczne. |
|||
Wydz.: Mechaniczny Sem.: VII Rok akad.: 2000/2001 |
Temat: Sterowanie propocjonalne |
Data: |
|
Wykonł: Murawski Leszek |
Ocena: |
||
Wstęp teoretyczny.
Połączenie przetwornika elektromechanicznego pracującego wg. zasady elektromagnesu proporcjonalnego ze wzmacniaczem hydraulicznym prowadzi do utworzenia zaworu proporcjonalnego.
Zawory proporcjonalne można podzielić na trzy grupy spełniające różne funkcje w układzie, a mianowicie :
-wzmacniacze elektrohydrauliczne proporcjonalne;
-zawory proporcjonalne przepływowe z sygnałem wyjściowym w postaci natężenia przepływu nazywane też zaworami dławiącymi proporcjonalnymi;
-zawory proporcjonalne ciśnieniowe z sygnałem wyjściowym w postaci ciśnienia.
W większości wymienionych wyżej rodzajów zaworów proporcjonalnych a zwłaszcza w jednostopniowych, znajduje zastosowanie elektroniczna regulacja położenia suwaka, to znaczy elektryczny sygnał wejściowy jest w sposób ciągły porównywany z sygnałem elektrycznym odpowiadającym chwilowemu położeniu suwaka i różnica tych sygnałów, czyli sygnał uchybu, jest sprowadzany do zera. W ten sposób zmniejsza się ujemny wpływ sił zakłócających dynamicznych i statycznych oddziałujących na sterowany zaworem proporcjonalnym proces technologiczny. Elektrohydrauliczne układy sterowania z zastosowaniem zaworów proporcjonalnych nazywamy układami zrealizowanymi w technice proporcjonalnej.
Elektroniczny układ sterowania stanowi oddzielny blok składający się z zasilacza i układu regulacji. Wraz z rozwojem zaworów proporcjonalnych wprowadzono wzmacniacze elektroniczne służące do sterowania tymi zaworami. Głównym zadaniem wzmacniacza elektronicznego sterującego pracą zaworu proporcjonalnego jest wytworzenie na podstawie różnicy napięciowej sygnału wejściowego napięciowego sygnału sprzężenia zwrotnego ciągłego sygnału prądowego, którego przepływ przez uzwojenie elektromagnesu proporcjonalnego zapewnia proporcjonalną zależność między przemieszczeniem rdzenia elektromagnesu a napięciowym sygnałem wejściowym. Dla stosowanych wartości napięciowego sygnału wejściowego u=10V natężenie prądu osiąga wartość kilku amperów. Ponieważ prądy płynące w uzwojeniach cewek elektromagnesów proporcjonalnych przekraczają zacznie 20mA, dlatego wzmacniacze elektroniczne do sterowania zaworami proporcjonalnymi muszą mieć zawsze wyjściowy stopień mocy.
Wiele procesów technologicznych sterowanych zaworami proporcjonalnymi wymaga, ażeby po zadaniu skokowego napięcia sygnału wejściowego hydrauliczny sygnał wejściowy narastał lub malał liniowo w ściśle określonym czasie. W tym celu wzmacniacz elektroniczny wyposaża się dodatkowo w generator przekształcający napięciowy skokowy sygnał wejściowy w sygnał wyjściowy hydrauliczny o nastawianej w sposób ciągły stromości zbocza zarówno dla rosnących, jak i malejących wartości sygnału.
Stanowisko laboratoryjne.
W stanowisku laboratoryjnym można wyróżnić trzy podstawowe zespoły
-zasilacz hydrauliczny;
-blok sterowania proporcjonalnego;
-układ wykonawczy.
Zasilacz hydrauliczny zapewnia doprowadzenie do bloku sterowania proporcjonalnego strumienia cieczy roboczej o określonych parametrach (natężenie przepływu, ciśnienie).
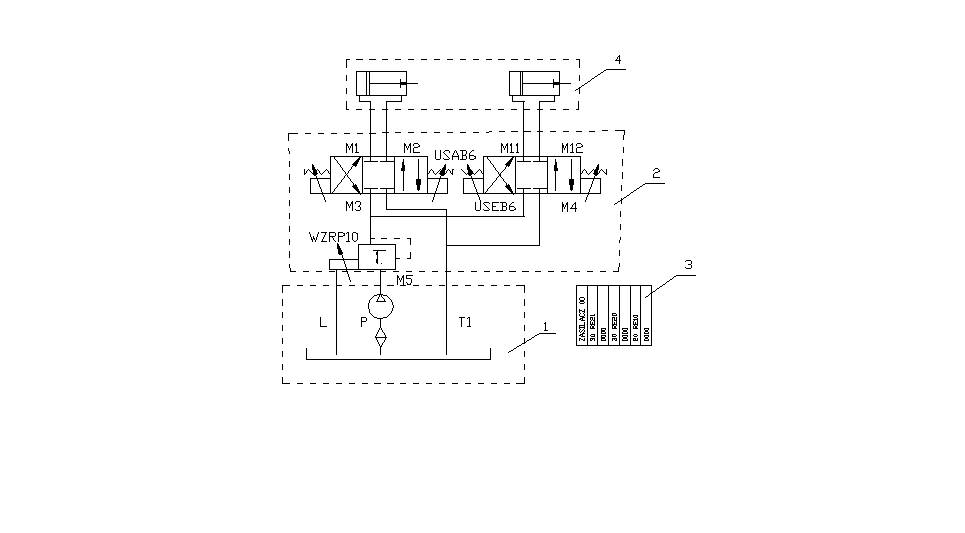
Blok sterowania proporcjonalnego składa się z rozdzielacza proporcjonalnego USAB-6/15-EQ-32, rozdzielacza proporcjonalnego USEB-6/15-MQ-20 oraz zaworu redukcyjnego WZRP-10/11-50Y. Elementy te zamocowane są na specjalnej płycie montażowej zapewniającej bezprzewodowe połączenie zamocowanych na niej elementów hydraulicznych w układ zgodnie z przedstawionym na rys.5 schematem. Płyta posiada otwory przyłączeniowe do podłączenia przełącznika punktów pomiarowych umożliwiającego pomiar ciśnienia w wybranej linii układu hydraulicznego.
Nad blokiem hydraulicznym usytuowany jest elektroniczny sterownik składający się z zasilacza elektrycznego, regulatora elektronicznego 30RE21, regulatora elektronicznego 30RE20, oraz regulatora elektronicznego 30RE10, służących odpowiednio do sterowania pracą rozdzielacza proporcjonalnego USEB-6/15-MQ-20 oraz zaworu redukcyjnegoWZRP-10/11-50Y.
Układ wykonawczy składa się z dwóch siłowników dwustronnego działania realizujących dowolny cykl roboczy, wyłączników krańcowych oraz czujnika pomiaru siły nacisku siłownika.
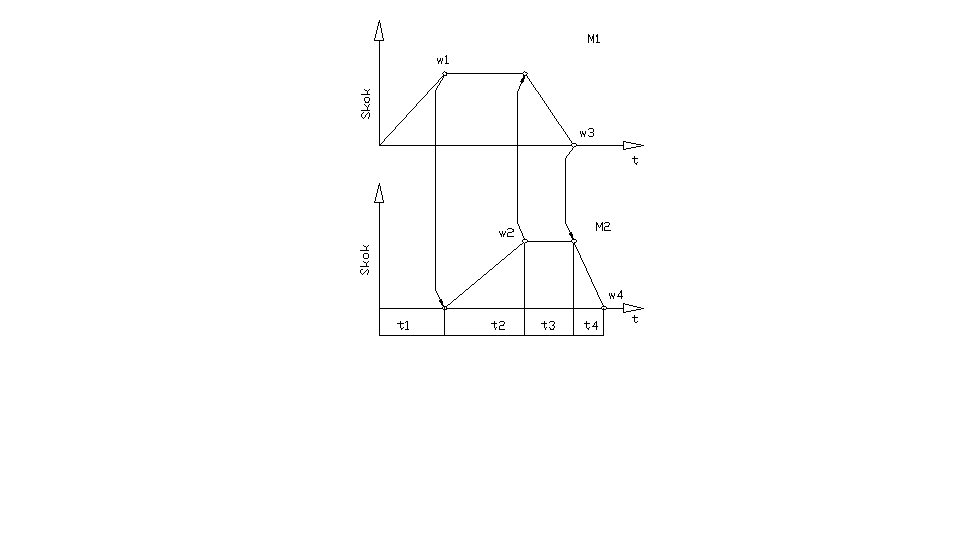
Punktem wyjścia do realizacji zadań niniejszego ćwiczenia jest cyklogram pracy siłowników przedstawiony na rys. 6. Czasy poszczególnych cykli, skok i siła na tłoczysku będą zmieniane w zależności od wytycznych zadania.
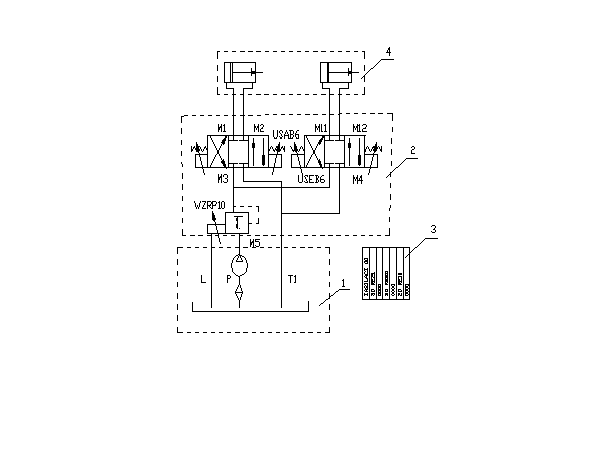
Rys.5. Schemat stanowiska laboratoryjnego: 1-stacja zasilająca, 2-hydrauliczny blok sterujący, 3-sterownik elektroniczny, 4-układ wykonawczy.
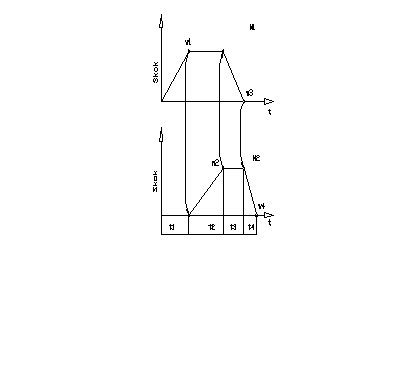
Rys.6. Cyklogram pracy siłowników
Wyszukiwarka
Podobne podstrony:
instrukcja hp2, studja, 5 semestr, Laboratorium napędów hydraulicznych i pneumatycznych, hp2
złożenie, SiMR, Laboratorium Napędów hydraulicznych i pneumatycznych, HP5
HP2 sprawko, SiMR, Laboratorium Napędów hydraulicznych i pneumatycznych, HP2
wzory2(1), SiMR, Laboratorium Napędów hydraulicznych i pneumatycznych, HP5
niezbędneminimum, SiMR, Laboratorium Napędów hydraulicznych i pneumatycznych, HP6
HP2 grupa Bb, SiMR, Laboratorium Napędów hydraulicznych i pneumatycznych, HP2
HP2 grupa B, SiMR, Laboratorium Napędów hydraulicznych i pneumatycznych, HP2
wzory(1), SiMR, Laboratorium Napędów hydraulicznych i pneumatycznych, HP5
Sterowanie proporcjonalne w układach hydraulicznych - sprawko, Uczelnia, Hydraulika i Pneumatyka
Sprawozdanie katalogi, AGH, Semestr 5, Napędy i sterowanie hydrauliczne i pneumatyczne, NiS, pneumat
Napędy i sterowanie hydrauliczne i pneumatyczne
Napędy i sterowanie hydrauliczne i pneumatyczne materiały do ćwiczeń audytoryjnych
sprawko posr, ZUT-Energetyka-inżynier, IV Semestr, Napędy hydrauliczne i pneumatyczne, pneumatyka od
sprawko lab5, ZUT-Energetyka-inżynier, IV Semestr, Napędy hydrauliczne i pneumatyczne, pneumatyka od
sprawko pompa, Mechatronika, Semestr V, Napędy hydrauliczne i pneumatyczne, Nasze sprawka
Stosiak, Studia PWr W-10 MBM, Semestr V, Układy Napędowe, Laboratorium
Naped hydrauliczny, Automatyka i Robotyka, Semestr 1, Maszynoznastwo, Napędy elektryczne pneumatyczn
więcej podobnych podstron