Politechnika Wrocławska |
LABORATORIUM PODSTAW ROBOTYKI |
Termin: piątek P 8.00-11.00 |
Skład grupy:
|
Temat: Identyfikacja parametrów geometrycznych robota dydaktycznego ROMIK. |
Data: |
|
|
Ocena: |
Cel ćwiczenia:
Celem ćwiczenia jest zapoznanie się ze strukturą kinematyczną robota dydaktycznego ROMIK oraz identyfikacją jego parametrów geometrycznych.
Przebieg ćwiczenia:
Rys.1. Struktura kinematyczna robota dydaktycznego ROMIK dla standartowych współrzędnych przegubowych.
Struktura kinematyczna dla zmodyfikowanych współrzędnych przegubowych.
Transformacja Denavita-Hartenberga dla zmiennych qi.
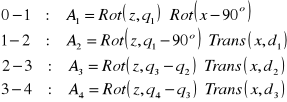
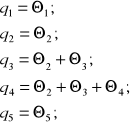
Pomiędzy klasycznymi współrzędnymi przegubowymi Θi robota a współrzędnymi zmodyfikowanymi zachodzą związki:
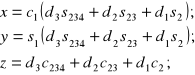
Wyznaczanie kinematyki:
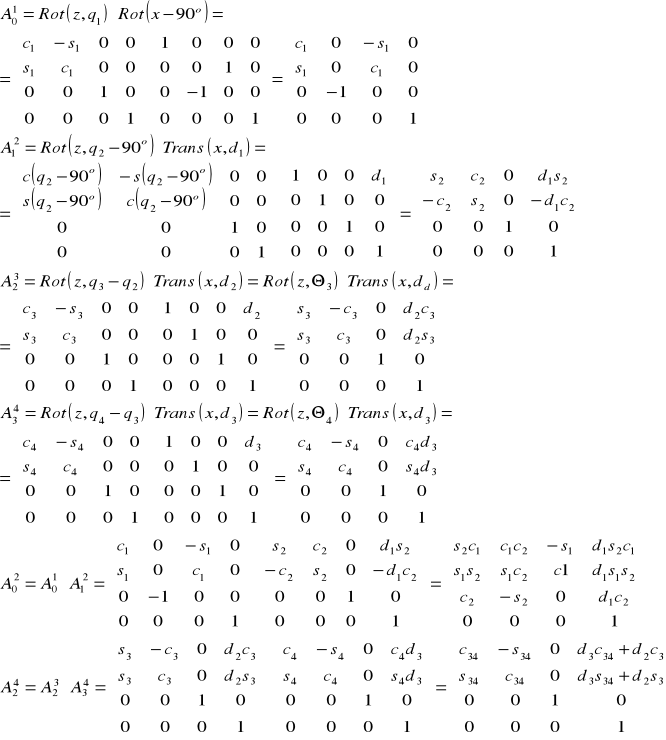
gdzie: c34=cos(Θ3, Θ4);
s34=sin(Θ3, Θ4);
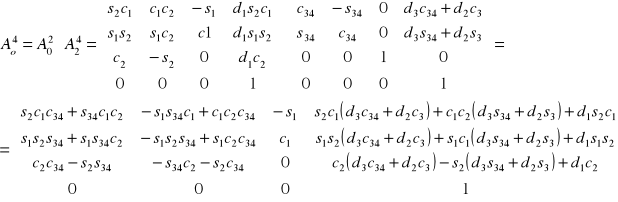
otrzymujemy:
Po przejściu na współrzędne zmodyfikowane, współrzędne wynoszą:

Po dokonaniu synchronizacji przestrzeń konfiguracyjna miała postać:
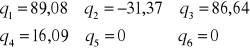
Natomiast przestrzeń zadaniowa:
![]()
Następnie zmieniliśmy konfiguracje robota w następujący sposób:
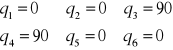
Uzyskaliśmy następujące pozycje we współrzędnych zewnętrznych:
![]()
Gdy podstawimy uzyskane dane do równań kinematyki spróbujemy ustalić jednoznaczne wartości parametrów d1,d2,d3.

![]()
Uzyskane wyniki nie pozwoliły na uzyskanie jednoznacznych wartości d2, d3. Otrzymaliśmy jedynie długość ramienia d1=205mm. Wiec dokonaliśmy jeszcze jednej symulacji dla następujących wartości:
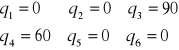
Wartość współrzędnych zewnętrznych zmieniła się na:
![]()
Ponownie obliczamy długość ramion:
na podstawie wcześniejszej próby i powyższego równania wyliczyliśmy ostatecznie następujące wartości:

Wnioski:
W ćwiczeniu tym mieliśmy do czynienia z robotem dydaktycznym ROMIK jest on małym manipulatorem napędzanym silnikami skokowymi. Cały zakres sterowania był realizowany na specjalnie stworzonej do tego celu aplikacji w PC. Na podstawie danych uzyskanych z tej aplikacji mogliśmy przy użyciu transformacji Denavita-Hartenberga obliczyć długość ramion badanego robota. Dokonaliśmy również badań w zakresie max wychyleń każdego z przegubów. Dla q1 możliwe było wpisywanie wartości w zakresie od 100o do -265o, co daje możliwość całkowitego obrotu wokół własnej osi, następnie q2 możliwy był zakres od 0o do 32o dalej już napotykamy ograniczenia mechaniczne, kolejny q3 regulowaliśmy w zakresie od 50o do 110o. Ze względu na zbyt duże wyeksploatowanie ROMIKA zakończyliśmy obserwacje na tych trzech stopniach swobody. Robot ten zostawia wiele do życzenia jeśli chodzi o zakres poruszania się i zbyt dużą zależność ruchu poszczególnych ramion względem siebie. Reasumując ROMIK jest dość prosta konstrukcją, która w dzisiejszych czasach może być klasyfikowana jako eksponat muzealny, jednak pozostawia dobre wrażenie gdyż najprostsze rozwiązania zawsze są najlepsze.
4