Zespół Dydaktyczno-Naukowy Napędów i Sterowania
Instytut Maszyn Roboczych Ciężkich
Laboratorium Układów Napędowych
Ćwiczenie N2
Układ napędowy z wolnoobrotowym silnikiem PM
Data wykonania ćwiczenia..................................................................
Data oddania sprawozdania.................................................................
Data i ocena z zaliczenia sprawozdania ...............................................
Zespół wykonujący ćwiczenie:
Nazwisko i imię ocena
............................................................. ......................
............................................................. ......................
............................................................. ......................
............................................................. ......................
............................................................. ......................
............................................................. ......................
............................................................. ......................
............................................................. ......................
............................................................. ......................
10. ............................................................. ......................
Wydział SiMR PW
Rok ak. 200../200..
Semestr...............
Grupa.................
Warszawa 2002r.
Cel i zakres ćwiczenia
W ćwiczeniu studenci zapoznają się z budową i działaniem silnika wolnoobrotowego z magnesami trwałymi (PM) w układzie napędu bezpośredniego pojazdu i system akwizycji danych GENIE. W trakcie ćwiczenia wykonywane są testy rozruchu i hamowania odzyskowego układu napędowego odwzorowującego napęd roweru elektrycznego. Studenci zapoznają się z możliwościami pomiarowymi pakietu pomiarowego GENIE i samodzielnie modyfikują system akwizycji danych
Do przeprowadzenia ćwiczenia wymagane są sformatowane i odwirusowane dyskietki (2 szt.)
1.Wprowadzenie
Mimo, że pierwsze maszyny elektryczne, które powstały w historii elektrotechniki - były maszynami o magnesach trwałych (stale magnetyczne) - to ich rozwój przez dziesiątki lat nie był tak szybki jak rozwój maszyn innych odmian. Wiązało się to z niskimi parametrami magnesów stałych stosowanych w pierwszych maszynach.
Ponowne zainteresowanie maszynami o magnesach stałych nastąpiło po roku 1932 od momentu wynalezienia przez T. Mishime stopu o nazwie ALNI, który składał się z trzech pierwiastków ferromagnetycznych: Fe, Ni, AL. Skład tego stopu z biegiem czasu ulegał zmianie, dodanie pierwiastków Co i Ti spowodowało zmianę parametrów magnetycznych materiału (stop ALNICO). Dalszym istotnym postępem w wytwarzaniu magnesów trwałych było uzyskiwanie ich metodą spiekania i sprasowywania. Materiałem wyjściowym dla tej technologii był sproszkowany stop ALNICO.
Głównym zakresem zastosowań tego typu maszyn, były prądnice tachometryczne, prądnice samochodowe i iskrowniki. No ogół niska wytrzymałość mechaniczna materiałów magnetycznie twardych a jednocześnie konieczność (dla większości rozwiązań) umieszczania magnesów na wirnikach, ograniczała maksymalne prędkości obrotowe maszyn. Z upływem lat, w miarę narastania postępu technologicznego wypracowano odpowiednie metody zabezpieczania magnesów, czy to w postaci bandaży z tworzyw sztucznych, czy też w postaci całych cylindrów lub tez w postaci wycinków cylindrów. Rozszerzenie możliwości budowy maszyn o mocach do 100 kW stało się możliwe dopiero po wprowadzeniu do produkcji stopów odmiany ALNICO. Udoskonalenie tych stopów w drodze zmian technologii wytwarzania, możliwości te jeszcze poszerzyły. Maszyny, w których zastosowano magnesy wykonywane z omawianych materiałów stały się w wielu wypadkach konkurencyjne pod względem parametrów w stosunku do porównywalnych maszyn o wzbudzeniu elektromagnetycznym. Były one jednakże drogie. O koszcie maszyn decydowały dawniej i obecnie decyduje, koszt magnesów - ściślej koszt kobaltu, którego udział w ogólnym składzie surowcowym jest duży. Możliwości zmniejszenia w znaczącym stopniu kosztów wytwarzania maszyn - przy jednoczesnym poszerzeniu zakresu ich zastosowań -spowodowało wprowadzenie do produkcji na początku lat pięćdziesiątych, magnesów ferrytowych. Magnesy ferrytowe są uzyskiwane w drodze prasowania proszków i spiekania związków tlenków żelaza i tlenków metali - głównie Ba lub Sr. Są one obecnie najczęściej stosowanym materiałem w produkcji magnesów trwałych.
Przeobrażenia w zasadach towarzyszących konstruowaniu maszyn elektrycznych o magnesach trwałych dokonane w wyniku wprowadzenia doń magnesów ferrytowych, zostały pogłębione w latach siedemdziesiątych po wprowadzeniu do produkcji magnesów zawierających metale z grupy ziem rzadkich. Pierwszym takim materiałem na takie magnesy był SmCo5 .
Potwierdzenie celowości zmian zasad konstruowania maszyn o magnesach trwałych nastąpiło po wprowadzeniu do produkcji w 1984 roku materiałów zawierających metale Nd, Fe, B. Obecnie do produkcji maszyn elektrycznych z magnesami trwałymi stosuje się materiały oparte o związki Sm2Co17 i NdFeB umożliwiające konstruowanie maszyn o małych wymiarach i bardzo dużej gęstości mocy (kW/kg).
2. Maszyny elektryczne
Współczesne maszyny elektryczne ze względu na rodzaj zasilania, budowę i działanie, można podzielić na następujące rodzaje (rys. 1):
Rys.1. Podział maszyn elektrycznych
maszyny prądu stałego komutatorowe (DC)
maszyny prądu zmiennego (AC) asynchroniczne
maszyny prądu zmiennego (AC) synchroniczne.
Przedmiotem ćwiczenia są maszyny synchroniczne o wzbudzeniu od magnesów trwałych.
3. Maszyny synchroniczne z magnesami trwałymi (PM)
Klasyczne silniki synchroniczne były stosowane w technice napędowej bardzo rzadko, głównie w układach dużej mocy ciągłej pracy ze stałą prędkością (np. piece cementowe). Rozwój przekształtników tyrystorowych (a obecnie tranzystorowych), które umożliwiają płynną zmianę częstotliwości napięcia zasilania spowodował, iż silniki synchroniczne są obecnie coraz częściej wykorzystywane.
Wirnik silnika synchronicznego ma uzwojenie wzbudzane prądem stałym I, które wytwarza pole o takiej samej liczbie biegunów, jaka jest w stojanie (rys.2). Silnik pracuje przy stałej prędkości obrotowej :
ω0 = ωs/p (1)
gdzie: ω0 - prędkość kątowa wirnika,
ωs - częstość napięcia zasilającego,
p - liczba par biegunów uzwojenia wirnika.
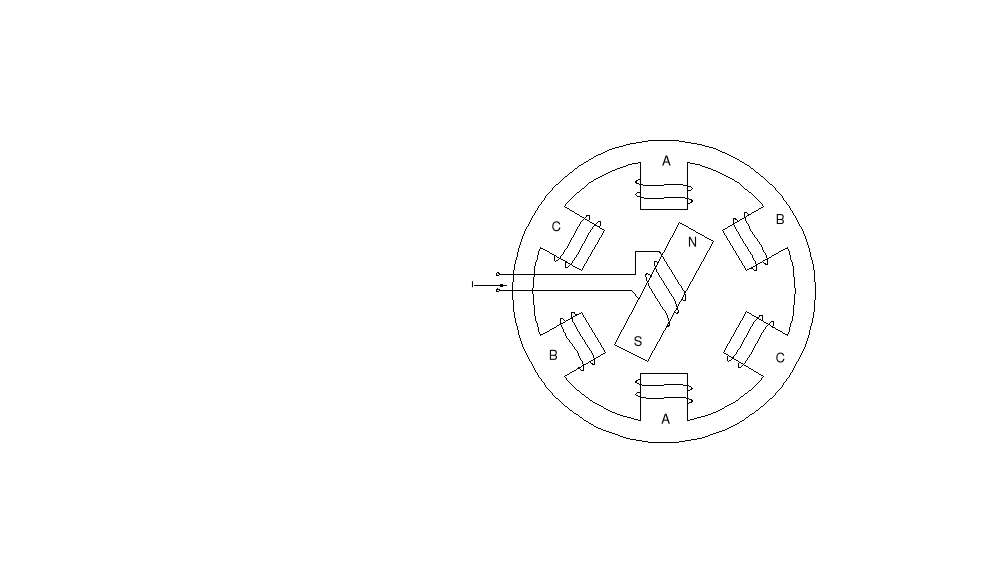
Rys.2. Konstrukcja maszyny synchronicznej
Podczas zmian obciążenia zmienia się tylko położenie wirnika względem pola wirującego maszyny, co reprezentuje kąt obciążenia ζ.
Rozwiązanie takie wymaga doprowadzenia napięcia stałego do wirnika poprzez pierścienie ślizgowe umieszczone na wale wirnika. Zastosowanie magnesów trwałych w miejsce uzwojeń wirnika pozwoliło wyeliminować pierścienie ślizgowe. W ten sposób powstał nowy typ silnika: maszyna bezszczotkowa (brushless motor).
Zalety silników bezszczotkowych o magnesach trwałych można zestawić następująco:
brak komutatora mechanicznego, który w tradycyjnych silnikach prądu stałego jest elementem kłopotliwym w eksploatacji,
doskonałe parametry dynamiczne wynikające z małej indukcyjności uzwojeń fazowych oraz małej bezwładności wirnika (brak uzwojeń miedzianych),
wysoka sprawność silnika dzięki zastosowaniu magnesów trwałych jako źródła wzbudzenia - brak strat w miedzi wirnika,
zmniejszenie średnicy wirnika a co za tym idzie wymiarów i masy całej maszyny,
proporcjonalna zależność momentu elektromagnetycznego do prądu.
Konstrukcje silników PM obarczone są również wadami:
klejone magnesy do wirnika narażone są na duże siły odśrodkowe odrywające,
duża wrażliwość właściwości magnetycznych na przekroczenie dopuszczalnych temperatur,
wpływ oddziaływania pola stojana na zjawisko koercji (odmagnesowania ) co przy przekroczeniu dopuszczalnych prądów silnika może doprowadzić do zniszczenia magnesów,
kruchość i brak odporności na czynniki mechaniczne,
wysoki koszt wytworzenia.
Rozróżnia się dwa typy maszyn bezszczotkowych, w zależności od kształtu siły elektromotorycznej:
sinusoidalne silniki synchroniczne z magnesami trwałymi (PMSM) dla przebiegu sinusoidalnego EMF,
bezszczotkowe silniki prądu stałego (BLDC) dla trapezoidalnego.
Dla wyżej wymienionych typów maszyn bezszczotkowych istnieją różne strategie zasilania. Budowa obu typów silników jest zbliżona do siebie, jednakże prosty sposób komutacji prądu w układzie zasilania maszyny BLDC powoduje, że przekształtnik energoelektroniczny może być traktowany jako komutator - stąd nazwa bezszczotkowy silnik prądu stałego. Nazwa taka jest związana z właściwościami takiego układu:
komutator mechaniczny zastąpiony jest przez komutator elektroniczny,
prądy zasilające układ przekształtnik - silnik jest prądem stałym,
napięcie zasilające układ przekształtnik - silnik jest napięciem stałym,
prędkość kątowa silnika jest proporcjonalna do wartości napięcia zasilającego,
czujniki położenia wału i odpowiedni układ sterujący komutacją prądu, powodują samosynchronizację układu,
kąt między wektorem strumienia wzbudzenia a wektorem prądu jest w przybliżeniu stały.
Tak więc bezszczotkowy silnik prądu stałego składa się z dwóch części:
energoelektronicznego przekształtnika z modulacją szerokości impulsów. Średnie napięcie zasilające silnik ustalane jest szerokością impulsów.
Silnika synchronicznego o magnesach trwałych i trapezowym przebiegu siły elektromotorycznej.
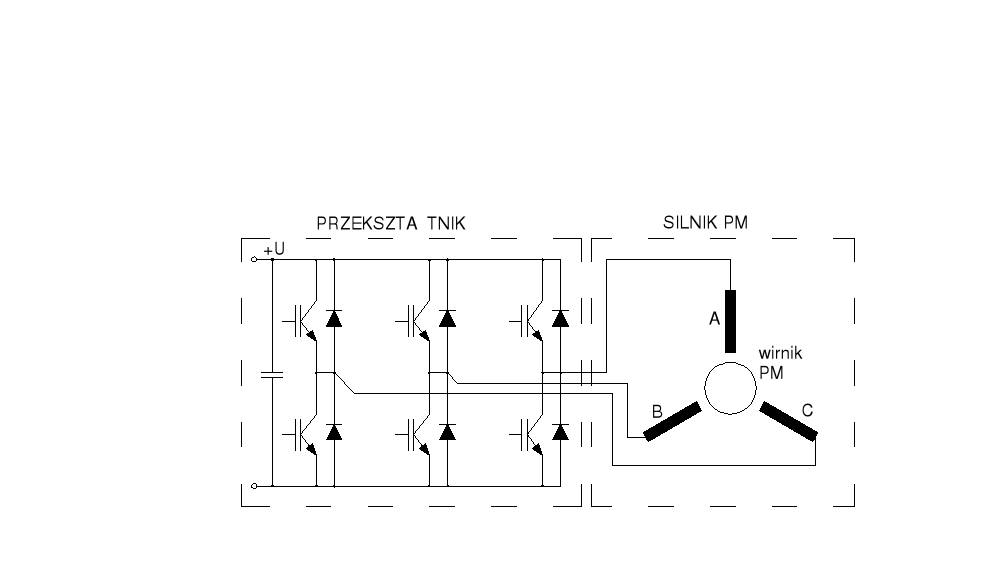
Rys.3. Silnik bezszczotkowy prądu stałego o magnesach trwałych - BLDC
Przebiegi sił elektromotorycznych w poszczególnych fazach mają przebieg trapezowy (rys. 4). Prądy w kolejnych fazach włączane są w sektorach gdzie siła elektromotoryczna E = const. Prąd wpływa do jednej fazy przez 120o el a wypływa przez kolejne 60o el przez dwie pozostałe. Napięcie przewodowe (międzyfazowe) włączane jest kolejno co 60o el pomiędzy dwie fazy silnika w celu wymuszenia odpowiedniego prądu. Średnia wartość napięcia impulsowego między fazami określana jest szerokością impulsu. Częstotliwość impulsów jest stała i tak duża, że przebieg prądu jest ciągły a jego średnia wartość wynosi I. Przy stałej prędkości obrotowej i stałym obciążeniu wartość średnia w czasie impulsu napięcia zasilającego można określić jako:
![]()
(2)
gdzie: Rf - rezystancja fazy silnika; Ef1,f2 - siła elektromotoryczna między fazami: Uf1,f2 - napięcie przewodowe, wartość średnia w czasie impulsu; if - prąd fazowy.
Wartość i kierunek prądu fazowego zależna jest od różnicy napięcia przewodowego i siły elektromotorycznej:
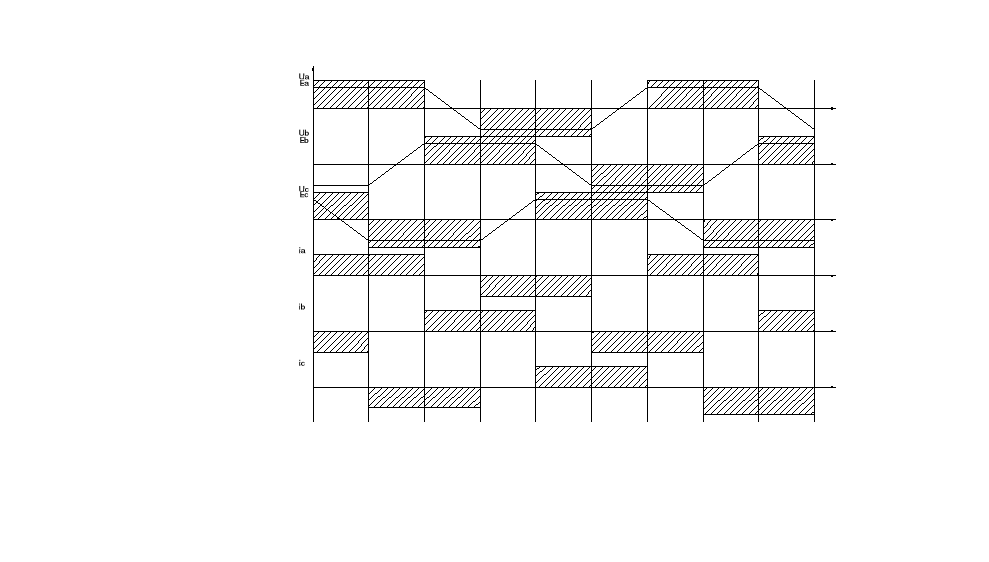
Rys.4. Przebiegi napięć fazowych, prądów i SEM w silniku BLDC
(3)
Czyli przy Uf1,f2 ≥ Ef1,f2 mamy pracę silnikową, a Uf1,f2 ≤ Ef1,f2 pracę generatorową - hamowanie rekuperacyjne.
Układy silników synchronicznych z magnesami trwałymi i sinusoidalnym kształtem SEM sterowane są w sposób analogiczny do zwykłych maszyn indukcyjnych AC z falowników prądu lub napięcia.
4. Silniki PM wolno-obrotowe
Zmniejszenie wymiarów podłużnych i poprzecznych maszyn z magnesami stałymi predysponuje je do zastosowań w układach o ograniczonej przestrzeni. Jednym z takich zastosowań jest bezpośredni napęd pojazdów. Silnik napędowy umieszczony może być bezpośrednio w kole pojazdu bez konieczności stosowania przekładni. Rozwiązanie takie ma szereg zalet:
zostaje obniżony środek ciężkości wózka napędowego,
średnica kół ulega zmniejszeniu dzięki przeniesieniu silnika z ramy wózka i wyeliminowaniu skrzynki przekładniowej,
możliwa jest konstrukcja pojazdów szynowych o obniżonej podłodze,
dzięki wyeliminowaniu przekładni zwiększona jest niezawodność układu, zmniejszone koszty przeglądów i zmniejszony hałas,
możliwe jest sterowanie niezależnie napędem każdego koła.
Ze średnicą koła związana jest maksymalna prędkość obrotowa koła i jednocześnie silnika. Dla standardowej wielkości koła 60 cm prędkość ta wynosi n = 350 [obr/min] dla prędkości liniowej pojazdu v = 50 [km/h]. Jest ona kilkakrotnie niższa od prędkości znamionowych silników bezszczotkowych (6000 - 7000 obr/min). Wynika stąd, że dla napędów bezpośrednich należy stosować silniki wielobiegunowe.
Drugim problem jest przeniesienie momentu napędowego z wirnika na koło napędowe. W tym celu stosuje się konstrukcje silników z wirnikiem zewnętrznym (rys. 5).
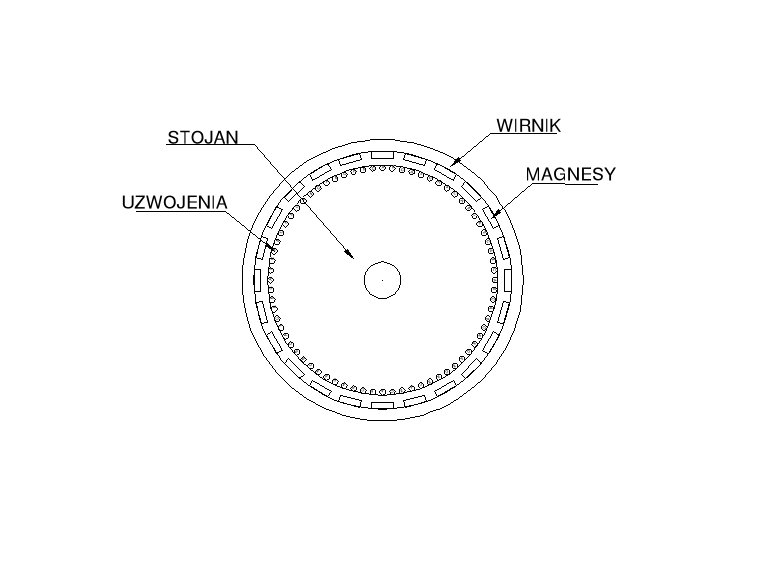
Rys. 4 Budowa 12 polowego silnika PM z wirnikiem zewnętrznym.
Nieruchomy stojan stanowi jednocześnie oś koła a obracający się na zewnątrz wirnik jest elementem koła napędowego.
Zastosowanie 12 par biegunów umożliwia uzyskania prędkości znamionowej silnika:
ω0 = ωs/p = 314/12 = 26.2 rd/s = 250 obr/min (4)
Rozwiązanie to ma też inne zalety: magnesy w trakcie pracy silnika są dociskane do wirnika co zabezpiecza je przed oderwaniem. Z drugiej strony ciepło wydzielane w uzwojeniach wewnętrznego stojana podgrzewa magnesy, które są chłodzone przez strumień powietrza opływający wirnik.
Przedmiotem ćwiczenia jest 12 polowy silnik z wirnikiem zewnetrznym.
5. Stanowisko laboratoryjne
Na stanowisku laboratoryjnym zainstalowany jest silnik wolnoobrotowy w układzie napędu roweru elektrycznego.. Obciążenie silnika stanowi masa reprezentująca obciążenie inercyjne jak również hamulec cierny, którego zadaniem jest odwzorowanie oporów stałych, głównie oporów toczenia i wzniesienia. Ze względu na stosunkowo małą prędkość jazdy roweru opory aerodynamiczne w wykonywanych testach zostaną pominięte.
Obciążenie inercyjne w postaci metalowego krążka ma za zadnie odwzorowanie masy roweru i rowerzysty poruszających się ruchem postępowym na ruch obrotowy. W tym celu wykorzystano równość energii kinetycznych ruchu postępowego i obrotowego:
![]()
(5)
gdzie:
m, v - masa i prędkość w ruchu postępowym;
Jk - moment bezwładności kół rowerowych;
J, - moment bezwładności i prędkość kątowa w ruchu obrotowym.
Ponieważ na stanowisku badawczym silnik został zainstalowany na kole motorowym, to można pominąć wpływ energii kinetycznej ruchu obrotowego kół rowerowych. A zatem równanie przyjmie postać:
![]()
(6)
Po wykorzystaniu zależności, że ![]()
, gdzie r - promień koła rowerowego i prostych przekształceniach otrzymujemy:
![]()
(5)
Przy założeniu że masa rowerzysty wynosi 53kg zaś promień koła rowerowego równy jest 0,25 m otrzymujemy równoważny zredukowany do osi koła moment bezwładności 3,3 kgm2.
Na rysunku 5. przedstawiono ideowy schemat stanowiska do badania wolnoobrotowego silnika PM.
Rys. 5.. Ideowy schemat stanowiska do badania wolnoobrotowego silnika PM |
|
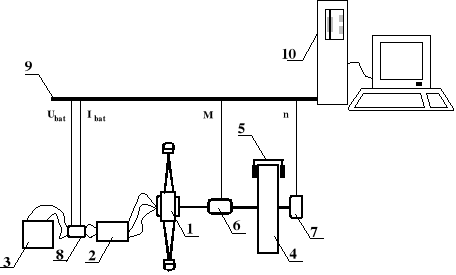
Sygnałami pomiarowymi są:
napięcie baterii akumulatorów elektrochemicznych Ubat,
prąd baterii akumulatorów elektrochemicznych Ibat,
moment silnika elektrycznego M,
prędkość obrotowa silnika elektrycznego n.
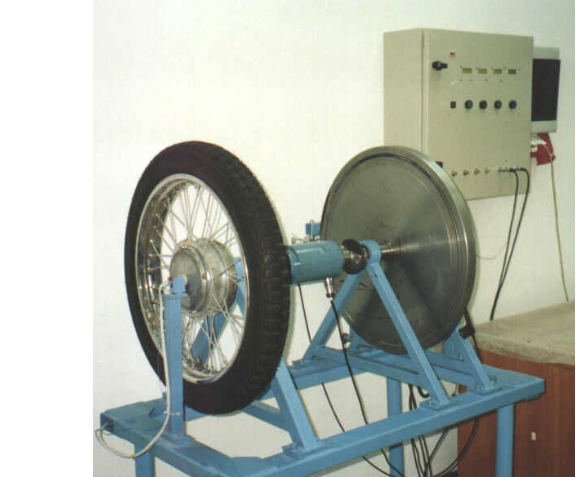
Rys. 6. Fotografa stanowiska laboratoryjnego z wolno-obrotowym silnikiem PM
7. System akwizycji danych GENIE
Do akwizycji danych pomiarowych wykorzystano system komputerowy składający się z kart pomiarowych i programu GENIE firmy AMERICAN ADVANTECH.
Pakiet GENIE 2.0 jest profesjonalną aplikacją działającą w środowisku MS-WINDOWS na komputery PC, przy pomocy której możliwe jest tworzenie strategii służącej do sterowania i bezpośredniego śledzenia i rejestracji w czasie rzeczywistym charakterystyk i parametrów badanego obiektu. Strategia jest zdefiniowana jako jedno lub więcej zadań, gdzie zadanie opisane jest poprzez strukturę połączonych ze sobą bloków funkcjonalnych i bloków rejestrująco-odtwarzających.
Stopień strukturalnej złożoności strategii zależy wyłącznie od możliwości hardwarowych posiadanego sprzętu komputerowego, pakiet nie ogranicza liczby wykorzystywanych jednocześnie bloków i urządzeń I/O.
GENIE zawiera dwa podstawowe moduły softwarowe:
GENIE Strategy Editor/Display Editor
GENIE Runtime
Strategy Editor
Edytor strategii wykorzystuje zbiór ikon które reprezentują dostępne bloki funkcjonalne oraz związane z nimi okna dialogowe poprzez które wprowadza się parametry definiujące bloki funkcyjne.

Rys.7. Bloki funkcjonalne Edytora Strategii
Do najważniejszych i najczęściej wykorzystywanych standardowych bloków należą:
generator sygnału analogowego (wejściowy i wyjściowy rozumiany z punktu widzenia układu), umożliwiający generowanie przebiegów sinusoidalnych, piłokształtnych, prostokątnych itp.)
blok wejściowy i wyjściowy sygnału cyfrowego
blok generujący sygnał liniowo zmienny, rosnący lub malejący, możliwość tworzenia sygnału „piła” , zatrzymanie po zmianie zadanej wartości itp.,
blok ekranu zawierający graficzną reprezentacje wartości wyjściowych i wejściowych, jak również reprezentację graficzną wartości wielkości sterowanych.
Ponadto do dyspozycji są jeszcze bloki:
przełącznik manualny i automatyczny
blok uśredniania danych
blok regulatora PID
Do tworzenia strategii można wykorzystać standardowe bloki zawarte w programie, jak również istnieje możliwość wypełnienia bloków „USERPRG” własnym programem, zapisując odpowiednie funkcje w języku o składni zbliżonej do składni języka C , w języku C++. Niezależnie od tego, system oferuje poprzez mechanizm DLL możliwość dołączenia bloków użytkownika w postaci oddzielnych, skompilowanych programów w języku C++, co powoduje iż praktycznie można zrealizować dowolne strategie sterowania.
Display Editor
Ponieważ program GENIE pracuje w środowisku Windows autorzy zapewnili dobrą reprezentację graficzną wartości wyjściowych i wejściowych. Do tego celu służy blok ekranu,. posiadający zarówno elementy służące do rejestracji danych jak również elementy służące do sterowania.

Rys. 8. Bloki Edytora Ekranu
Do rejestracji danych mamy do dyspozycji:
rejestrator zmiennych w funkcji czasu, umożliwia obserwację zmian podczas pracy układu w czasie trwania rejestracji
rejestrator zmiennych w funkcji innej zmiennej, umożliwia obserwację zmian jednej zmiennej w zależności od zmian drugiej,
rejestrator słupkowy (pionowy i poziomy)
rejestrator zegarowy,
historiogram umożliwia przeglądanie wybranych zmiennych w czasie poprzedzającym bieżący czas badania
rejestrator numeryczny.
Ponadto przełączniki manualne, sygnalizatory świetlne które informują o stanie pracy układu.
Do sterowania „ręcznego” służą:
potencjometr obrotowy
potencjometr suwakowy o ustawianych zakresach
potencjometr numeryczny.
Budowanie ekranu kontrolnego odbywa się poprzez odpowiednie rozmieszczenie przy pomocy myszy i ikon przedstawiających sobą elementy służące do prezentacji danych jak: oscyloskop, wskaźnik, wyświetlacz analogowy, wyświetlacz cyfrowy itp.
Moduł Genie RUNTIME jest elementem wykonawczym zbudowanej strategii. Ponadto pozwala on na określenie parametrów, z którymi zaprojektowana strategia zostanie wykonana. Do podstawowych parametrów, których poprawne ustawienie zapewni właściwe wykonanie badań, należy czas próbkowania. Określa on z jaką częstotliwością będzie pobierany z układu pomiarowego i wyświetlany (jak również zapisywany) sygnał pomiarowy. W tym programie największą możliwą do uzyskania wartością jest około 99 godzin 59 minut, najmniejszą zaś 1 milisekunda. W praktyce najmniejszy czas jaki możemy ustawić ograniczony jest zastosowaną kartą pomiarową i liczbą wykorzystywanych kanałów pomiarowych. W przypadku systemu zastosowanego do badań minimalny czas, którego ustawienie zapewniało poprawność wykonania pomiarów wynosił 100 milisekund.
Wykorzystując bloki funkcjonalne dostępne w module Strategy Editor zbudowano strategię pomiarową dla stanowiska badawczego zapewniającą rejestrację wyżej wymienionych sygnałów pomiarowych. Widok zbudowanej strategii przedstawiono na rysunku 9.
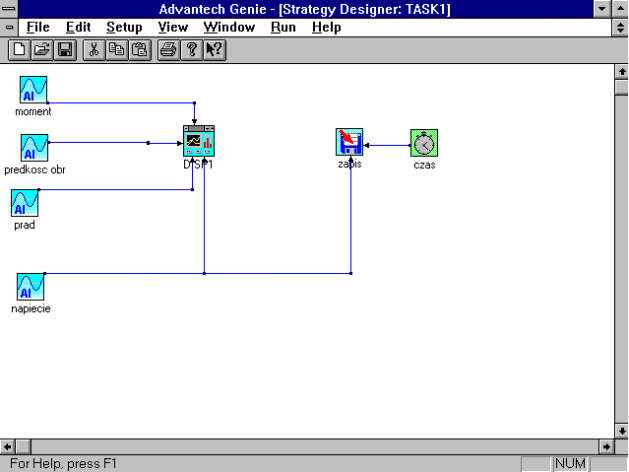
Rys.9. Strategia pomiarowa dla stanowiska badawczego wolnoobrotowego silnika PM.
Wyniki pomiarów dla tej strategii można obserwować w czasie rzeczywistym na ekranie, do budowy którego wykorzystano bloki dostępne w module Display Editor. Widok ekrany prezentującego wyniki pomiarów przedstawiono na rysunku10.
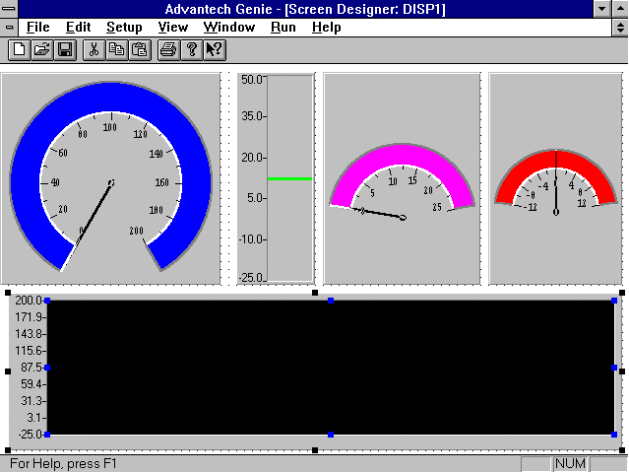
Rys.10. Ekran graficzny prezentacji wyników pomiarów dla stanowiska
badawczego wolnoobrotowego silnika PM.
Na rysunku 10 poszczególne bloki przedstawiają (od lewej) pomiar:
prędkości obrotowej silnika PM;
momentu obciążenia;
napięcia baterii elektrochemicznej;
prądu baterii elektrochemicznej;
(na dole) ekran prezentacji wymienionych sygnałów w czasie rzeczywistym.
10. Przebieg ćwiczenia
Badany silnik elektryczny wraz z układem sterowania przeznaczony jest do napędu roweru elektrycznego. Dlatego też posiada on pewne cechy charakterystyczne wynikające z takiego zastosowania.
Pierwszą cechą jest rozruch silnika elektrycznego. Ze względów bezpieczeństwa podczas jazdy rowerem elektrycznym rozruch silnika następuje poprzez przyłożenie momentu z zewnątrz, najczęściej poprzez przyłożenie siły do pedałów roweru. Wynika to z faktu nie zastosowania czujników położenia wału silnika, wymaganych do prawidłowego rozruchu silnika od prędkośco zerowej. Jednocześnie taki sposób rozruchu zabezpiecza przed przypadkowym ruszeniem roweru z miejsca.
Na rysunkach 11 i 12 przykładowe przebiegi zarejestrowane na stanowisku laboratoryjnym.

Rys.11. Przebieg zmian momentu i prędkości w czasie rozruchu silnika elektrycznego

Rys.12. Przebieg zmian napięcia i prądu baterii w czasie rozruchu silnika elektrycznego
Kolejną cechą charakterystyczną wolnoobrotowego silnika PM wraz z układem sterowania jest możliwość odzysku energii kinetycznej roweru w czasie hamowania rekuperacyjnego. Na rysunkach 13 i 14 przedstawiono wyniki badań dla fazy hamowania rekuperacyjnego. Energia kinetyczna roweru zamieniana jest na energię elektryczną a następnie gromadzona w akumulatorach elektrochemicznych. O odzysku energii kinetycznej roweru świadczy zmiana kierunku prądu baterii elektrochemicznej, który jest wyznacznikiem kierunku przepływu energii.

Rys. 13. Przebieg zmian momentu i prędkości w czasie hamowania rekuperacyjnego

Rys. 14. Przebieg zmian napięcia i prądu baterii w czasie hamowania rekuperacyjnego
Jak widać z przeprowadzonych badań hamowanie rekuperacyjne przebiega jedynie do pewnej wartości prędkości jazdy. W celu kontynuowania fazy hamowania należy, po osiągnięciu tej granicznej wartości prędkości, wyraźny zanik momentu hamującego związany z odłączeniem zasilania od silnika elektrycznego, zastosować hamowanie przy pomocy hamulców mechanicznych.
W trakcie ćwiczenia należy przeprowadzić następujące badania:
Badania fazy rozruchu silnika. Na postawie zarejestrowanych wielkości fizycznych w układzie należy określić:
wielkość momentu rozruchowego
moc i energię pobraną z baterii akumulatorów
moc mechaniczną i energię pojazdu
sprawność
ograniczenie prędkościowe
czas rozpędzania
Badanie fazy hamowania: pomiary i obliczenia analogicznie jak dla pkt.1
Określenie prądu ograniczenia silnika: w trakcie pracy napędu należy zahamować hamulcem mechanicznym napęd do momentu wyłączenia prądu przez układ regulacji.
Modyfikacja struktury pomiarowej programu GENIE. W miarę potrzeb należy zmienić strukturę pomiarową i pulpit wyświetlania wyników.
Wyniki zarejestrowane w systemie GENIE są następnie zapisywane na dyskietce w formacie ASCII.
W sprawozdaniu należy przedstawić wykresy czasowe zarejestrowanych wielkości pomiarowych i wyniki oraz metodykę przeprowadzonych obliczeń. O ile będzie to konieczne należy zastosować numeryczne wygładzanie zarejestrowanych przebiegów.
2
Wyszukiwarka
Podobne podstrony:
Wnioski do spr z elektry 3, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Lab. Ukł. Napędowych
ProtokółN2, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Lab. Ukł. Napędowych
Wnioski e1, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Lab. Ukł. Napędowych, sprawko napedy
sprawko z napendow do pompy, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Lab. Ukł. Napędowych
KołoRowerowe, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Lab. Ukł. Napędowych
hyd staty, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Lab. Ukł. Napędowych
Wnioski do spr z elektry 3, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Lab. Ukł. Napędowych
ACOVER, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, TeoRuch
A-rys1-10, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, TeoRuch
A-Rzdz3, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, TeoRuch
ROZDZ 8U, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
COVER, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8K, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
A-Intrdc, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, TeoRuch
ROZDZ 8C, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 10B, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
B-rozdz6, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, TeoRuch
ROZDZ 8E, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
więcej podobnych podstron