![]()
![]()
co oznacza ,że dla wybranego i-tego ogniwa manipulatora mamy ![]()
Podstawy sterowania robotów i maszyn
Temat : Zadanie odwrotne
Jakub Pędzik
Gr III
AiR III sem VI
Wstęp
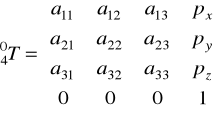
Opierając się na zadaniu transformacji odwrotnej można stwierdzić, że jeżeli mamy macierz transformacji prostej manipulatora w postaci ogólnej określonej dla wszystkich n jego członów w postaci T0i jak również mamy macierze transponowane wyznaczone dla poszczególnych ogniw manipulatora T -1i , to idąc od kiści manipulatora - ogniwa n, mnożąc macierz To, kolejno przez macierz transponowaną ogniw n, n-1 n-2,... .,l uzyskamy model kinematyki odwrotnej danego manipulatora w postaci
![]()
![]()
co oznacza ,że dla wybranego i-tego ogniwa manipulatora mamy ![]()
Zadanie.
Wyznaczamy współrzędne konfiguracyjne;
Y3
Y2 L2
L3
X2 X3
P
L1
Z1
Y0
Z0
X0
X1 Y1
Rys.1. Schemat łańcucha kinematycznego manipulatora.
Dane:
L1=0.9 [m]
L2=0,6 [m]
L3=0,3 [m]
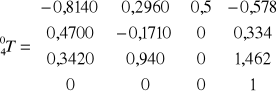
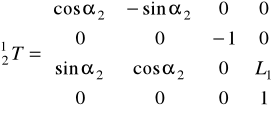
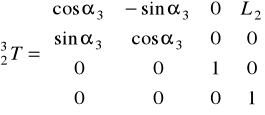
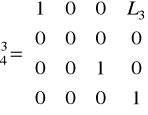
Macierze przekształceń:

![]()
W celu wyznaczenia kątów ![]()
,![]()
i ![]()
dokonujemy przekształcenia.
![]()
gdzie:
![]()


Porównując elementy z macierzy ![]()
i ![]()
obliczamy kąty ![]()
,![]()
i ![]()
.
![]()
![]()
![]()
gdzie:
![]()
![]()
![]()
![]()
Po podstawieniu otrzymujemy:
![]()
Stosując wzór na różnicę kątów, otrzymujemy:
![]()
![]()
![]()
Ostatecznie rozwiązanie na ![]()
można być zapisane jako:
![]()
![]()
Uwzględniając położenie punktu P na podstawie danych wejściowych (-px,py) , kąt ![]()
jest równy:
![]()
Rozwiązując układ równań:
![]()
![]()
obliczamy kąt ![]()
:
![]()
![]()
![]()
![]()

![]()
![]()
Kąt ![]()
obliczamy stosując wzór na sumę kątów:
![]()
Podstawiając do równania:
![]()
dane:
![]()
otrzymujemy:
![]()
![]()
![]()
Wyniki:
![]()
![]()
![]()
2