P[N]
1
2
3
4
5
x średnie
x[m]
k
0
0
0
0
0
0
0
0
0
5
30
13
31
30
40
28,8
0,0000288
173611,1
10
70
69
80
70
60
69,8
0,0000698
143266,5
20
95
109
170
135
130
127,8
0,0001278
156494,5
POLITECHNIKA RZESZOWSKA
ZAKŁAD POJAZDÓW SAMOCHODOWYCH I SILNIKÓW SPALINOWYCH
Sprawozdanie z Laboratorium Technologii Samochodu
Pomiar sztywności robota PR-02
1.Cel ćwiczenia
Celem ćwiczenia jest zapoznanie się z budową, zastosowaniem, możliwościami robota PR - 02, a także dokonanie pomiaru sztywności wybranych zespołów. Badanie sztywności robota PR-02 przy wysuniętym i schowanym ramieniu.
2.Wiadomości teoretyczne
Układ sterowania robota jest układem elektrycznym, programowanym za pomocą tablicy wtykowej. W części manipulacyjnej robota znajdują się rozdzielacze oraz wyłączniki krańcowe lub drogowe, reszta urządzeń układu sterowania umieszczona jest w wolnostojącej szafie sterowniczej. Robot może wykonywać ruch w trzech układach X,Y,Z.
PR - 02 jest robotem modułowym ( moduł - element wykonawczy, który ma jeden stopień swobody), programowanym za pomocą matrycy diodowej
Napęd odbywa się za pomocą układów pneumatycznych. Dokładność pozycjonowania zapewniają wyłączniki krańcowe w części manipulacyjnej.
Liczba stopni swobody — 2-7
Udźwig — 4,3 kg
Dokładność pozycjonowania — ± 0,5 mm
Zakres przemieszczeń płaszczyzny poziomej — 400 mm
Zakres przemieszczeń płaszczyzny pionowej — 400 mm
Prędkość przesunięć — 300-500 m/s
Prędkość obrotów — 90-160 0/s
Prędkość programu — 16 lub 52 takty
Chwytaki:
-mechaniczne
-podciśnieniowe
-magnetyczne
Sztywność robota zależy od:
-budowy
-ilości przegubów
-rodzaju materiału elementów
-masy
Rodzaje sztywności:
-statyczna
-dynamiczna
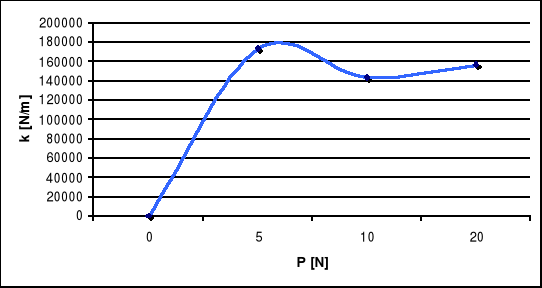
3.Przebieg ćwiczenia
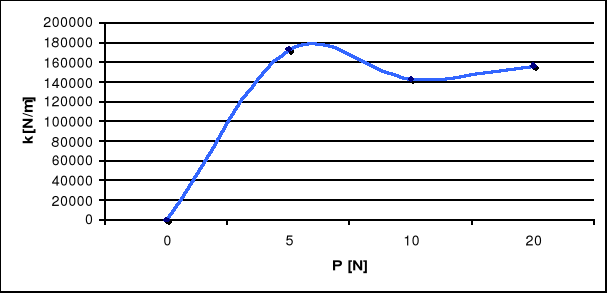
L1 - 440mm ramię schowane
H - 810 mm
P[N] |
1 |
2 |
3 |
4 |
5 |
x średnie |
x[m] |
k |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
5 |
30 |
13 |
31 |
30 |
40 |
28,8 |
0,0000288 |
173611,1 |
10 |
70 |
69 |
80 |
70 |
60 |
69,8 |
0,0000698 |
143266,5 |
|
95 |
109 |
170 |
135 |
130 |
127,8 |
0,0001278 |
156494,5 |
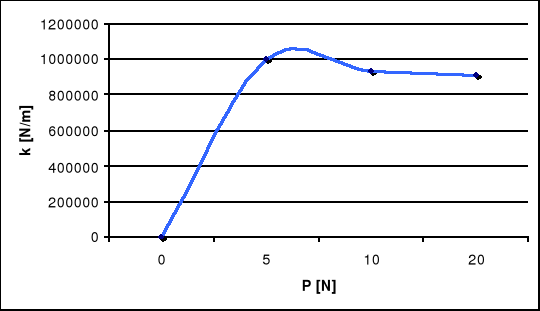
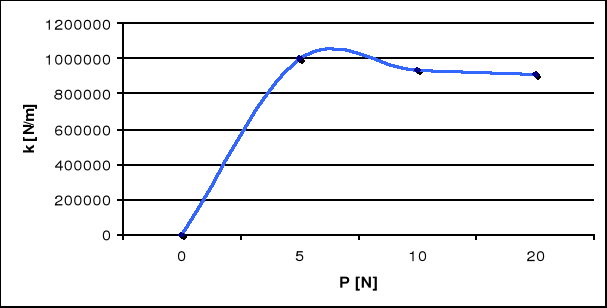
L1 - 680mm ramie wysunięte
H - 810m
P[N] |
1 |
2 |
3 |
4 |
5 |
x średnie |
x[m] |
k |
0 |
|
|
|
|
|
0 |
0 |
0 |
5 |
6 |
5 |
5 |
5 |
4 |
5 |
0,000005 |
1000000 |
10 |
13 |
11 |
10,5 |
10 |
9 |
10,7 |
0,0000107 |
934579,4 |
|
27 |
22 |
21 |
21 |
19 |
22 |
0,000022 |
909090,9 |
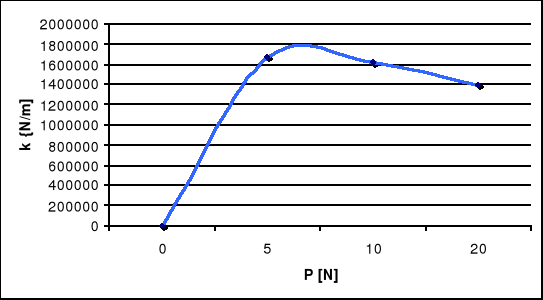
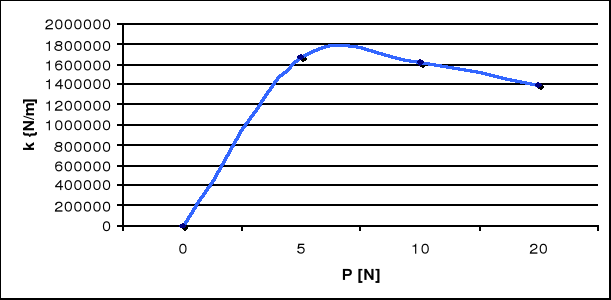
P[N] |
1 |
2 |
3 |
4 |
5 |
x średnie |
x[m] |
k |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
5 |
3 |
4 |
3 |
3 |
2 |
3 |
0,000003 |
1666667 |
10 |
6 |
7 |
6 |
6 |
6 |
6,2 |
0,0000062 |
1612903 |
|
14 |
15 |
17 |
13 |
13 |
14,4 |
0,0000144 |
1388889 |
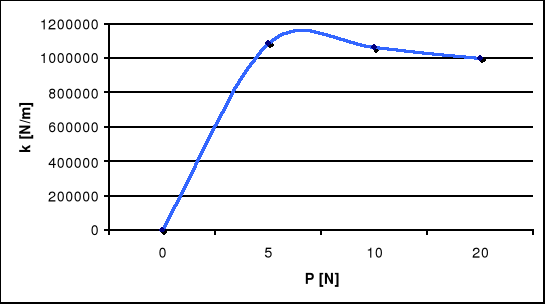
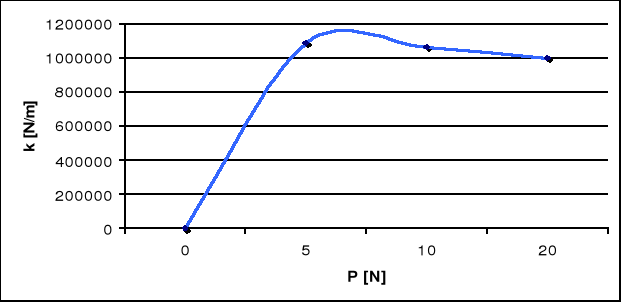
Obrót o 900
L1-440mm ramię schowane
H - 810mm
P[N] |
1 |
2 |
3 |
4 |
5 |
x średnie |
x[m] |
k |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
5 |
6 |
5 |
4 |
4 |
4 |
4,6 |
0,0000046 |
1086957 |
10 |
12 |
9 |
9 |
8 |
9 |
9,4 |
0,0000094 |
1063830 |
20 |
26 |
19 |
19 |
18 |
18 |
20 |
0,00002 |
1000000 |
3. Wnioski