13. Podać charakterystyki biegu jałowego silnika indukcyjnego i uzasadnić fizycznie oraz analitycznie
ich kształt.
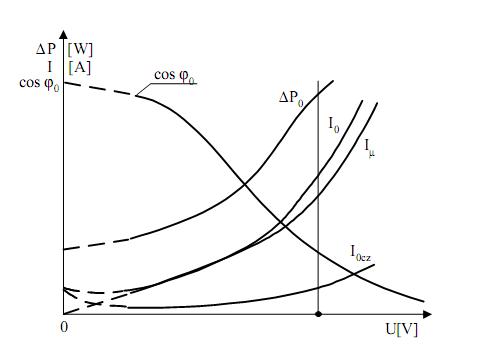
- krzywa mocy (P0) ma przebieg paraboliczny, ponieważ zależy od kwadratu prądu. Pośrednio można też powiedzieć, że strafy Pfe zależą od kwadratu indukcji - tym samym od kwadratu napięcia. Jednocześnie moc P0 jest sumą mocy traconych w żelazie, na wale, oraz w uzwojeniu stojana. Zakrzywienie paraboli mocy w okolicy U=Un jest powodem nasycenia się rdzenia (analogicznie do trafa, po nasyceniu stosunek przyrostu mocy Pfe do przyrostu napięcia zasilania Pfe jest mniejszy niż przed nasyceniem)
- krzywa magnesowania ( krzywa I0) - kształt wynika z magnesowania rdzenia oraz strat na prądy wirowe, (kształt podobny do odwróconej krzywej magnesowania magnetyków), składowa magnesująca, która prawie „nakłada” się na I0 świadczy o tym, że moc pobierana podczas biegu jałowego prawie w całości idzie na magnesowanie rdzenia, tylko w niewielkim stopniu na straty na prądy wirowe („mała” składowa I0cz). W niskich zakresach napięć zasilających dominują straty mechaniczne, które są stałe dla stałej prędkości obrotowej - stąd kształt liniowy. Dla większych napięć w grę wchodzą już znaczące straty w żelazie (zależne od kwadratu napięcia)
- krzywa cos(φ0) - współczynnik mocy stanu jałowego wyraża się jako stosunek składowej czynnej prądu jałowego do prądu jałowego (I0cz/I0), stąd przy niskich napięciach dominuje składowa czynna --> cos(φ0) może dochodzić do wartości =1, wraz z nasycaniem obwodu magnetycznego zaczyna dominować składowa magnesująca i cos(φ0) może spadać do około 0,1
14. Podać charakterystyki zwarcia badanego silnika indukcyjnego i uzasadnić fizycznie oraz analitycznie ich kształt.
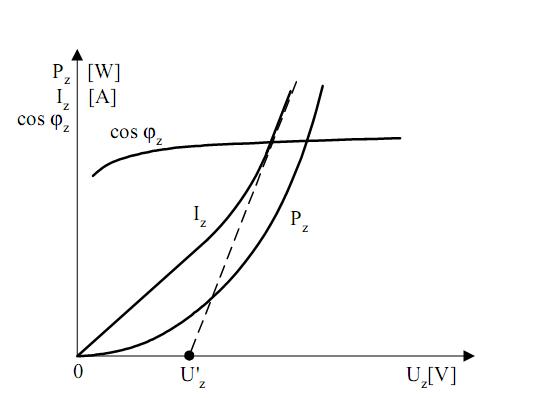
- krzywa mocy - kształt prawie idealnie paraboliczny ---> moc tracona podczas tej próby dotyczy w całości strat w uzwojeniu stojana i wirnika --> zależność kwadratowa od prądu (straty Joule'owskie), a że prąd ~ napięcie liniowo, to zależność P(U) jest paraboliczna.
- krzywa Iz, - przy małych napięciach rozproszenie strumienia magnetycznego następuje w żłobkach --> kształt liniowy, moment nasycania „zębów” żłobków widać jako zakrzywienie, następnie nasycony obwód magnetyczny --> zależność znów liniowa.
- krzywa cos(φzw) - początkowo nienasycone żłobki ---> zależność nieliniowa, następnie, ponieważ strumień rozproszenia przebiega zasadniczo przez powietrze (unieruchomiony silnik), rekatancja jest praktycznie stała --> stąd kształt liniowy, prawie nie zależny od napięcia.
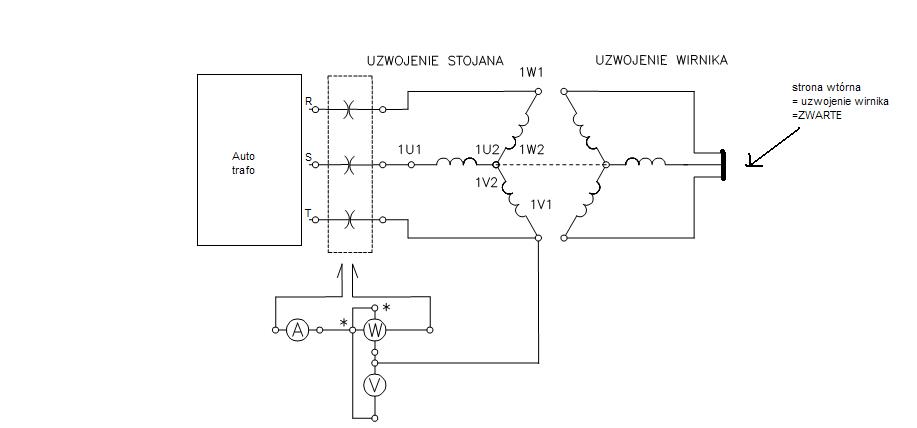
15. Narysować układ pomiarowy do wyznaczania charakterystyki biegu jalowego MI. Dla danych znamionowych MI dobrać zakresy mierników.
- cewka amperomierza - prąd znamionowy (podczas pomiaru Ia nie powinien przekraczać 0,5 In, ale ze wzlgędu na rozruch silnika dobiera się amperomierz na Ia~In)
- cewka prądowa watomierza - patrz wyżej,
- cewka woltomierza - napięcie do 1,2* Un
- cewka napięciowa watomierza - patrz wyżej.
16. Narysować układ pomiarowy do wyznaczania charakterystyki zwarcia MI. Dla danych znamionowych MI dobrać zakresy mierników.
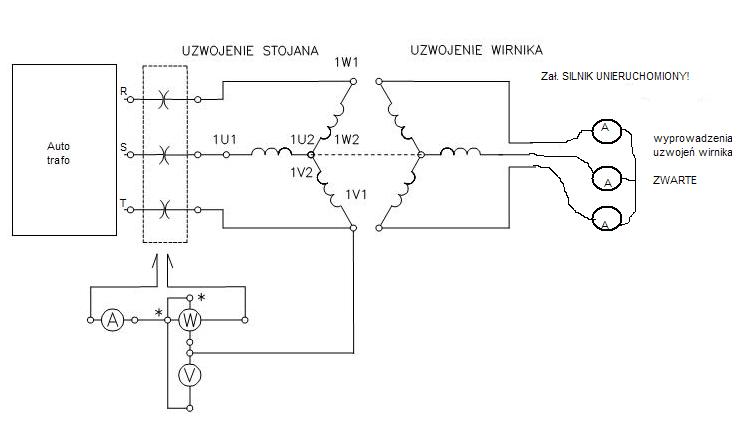
- cewka amperomierza w obwodzie stojana - do 1,5* In
- cewka prądowa watomierza - jak wyżej
-cewka woltomierza w obwodzie stojana - 0,6*Un (dla U=Un prąd wyznacza się z charakterystyki, badanie Iz przy U=Un byłoby zabójcze dla silnika)
- cewka napięciowa watomierza - jak wyżej,
- cewki amperomierzy/a w obwodzie zatrzymanego wirnika - 1,5* In
Wyszukiwarka
Podobne podstrony:
MI5-7, POZOSTAŁE, ELEKTR✦✦✦ (pochodne z nazwy), SEMESTR III, ME 1 MegaPaka, 4 MA, koło
cw 13 filtry, POZOSTAŁE, ELEKTR✦✦✦ (pochodne z nazwy), SEMESTR III, Elektronika, sprawko 13
wykresy do sprawka z elementów fotoelektrycznych, POZOSTAŁE, ELEKTR✦✦✦ (pochodne z nazwy), SEMESTR I
zagadnienia do egzmaniu 2010, POZOSTAŁE, ELEKTR✦✦✦ (pochodne z nazwy), SEMESTR III, Elektronika
Ściaga Trafo, POZOSTAŁE, ELEKTR✦✦✦ (pochodne z nazwy), SEMESTR III, Maszyny elektryczne, Maszyny ele
symbole elementów, POZOSTAŁE, ELEKTR✦✦✦ (pochodne z nazwy), SEMESTR III, Elektronika
1-4, POZOSTAŁE, ELEKTR✦✦✦ (pochodne z nazwy), SEMESTR III, Maszyny elektryczne, Zerówki z poprzednic
Lab ME En spraw strona tytulowa 0 2010 2011, POZOSTAŁE, ELEKTR✦✦✦ (pochodne z nazwy), SEMESTR III, M
Sciaga trafo 2, POZOSTAŁE, ELEKTR✦✦✦ (pochodne z nazwy), SEMESTR III, Maszyny elektryczne, Maszyny e
zagadnienia do egzmaniu 2011, POZOSTAŁE, ELEKTR✦✦✦ (pochodne z nazwy), SEMESTR III, Elektronika
09-12, Energetyka, sem4, sem IV, Maszyny Elektryczne, ME 1 MegaPaka, 4 MA, koło
odp lab3 pofa-update 16-04-10, WEiTI - Makro, SEMESTR III, POFA, Laboratorium, Lab 3
Zagadnienia egzaminacyjne z Elektrotechniki i elektroniki, Polibuda (MiBM), Semestr III, III semestr
lab3 pofa 16-04-10, WEiTI - Makro, SEMESTR III, POFA, Laboratorium, Lab 3
cw 13 opornosci wlasc, Studia, I o, rok II, semestr III, inżynieria materiałowa, od Pauliny
elektrotechnika ściąga, MiBM, Semestr III, Elektrotechnika, ściągi od mirona
Rachunkowość fiansowa - ćwiczenia (4) 13.11.2010, WSFiZ Białystok - zarządzanie, Semestr III, RACHUN
Rachunkowośc fiansowa - ćwiczenia (3) 13.10.2010, WSFiZ Białystok - zarządzanie, Semestr III, RACHUN
Maszyny Elektryczne 2 cw1, Szkoła, Semestr III, Maszyny Elektryczne, Maszynki, Maszyny elektryczne [
więcej podobnych podstron