Politechnika Częstochowska
Wydział Elektryczny
Katedra Elektrotechniki
Zakład Elektrotechniki
Laboratorium Elektrotechniki Teoretycznej
Badanie czwórników

Częstochowa 2004
1. Cel ćwiczenia
Celem ćwiczenia jest zapoznanie się z parametrami czwórników oraz wyznaczenie transmitancji napięciowo-napięciowej wybranych czwórników w zakresie częstotliwości akustycznych.
2. Wiadomości podstawowe
2.1. Czwórniki
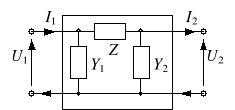
Czwórnik - element czterozaciskowy z wyróżnioną parą zacisków wejściowych i wyjściowych, spełniający warunki równości prądów I1 = I′1 oraz I2 = I′2 (rys. 1). Przyjmuje się, że prąd I1 jest skierowany do czwórnika, a prąd I2 - od czwórnika |
Rys. 1. Czwórnik |
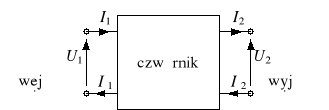
Zależności pomiędzy dwiema wielkości wejściowymi U1 i I1 oraz wyjściowymi U2 i I2 mogą być przedstawione na sześć różnych sposobów:
jako równania łańcuchowe, gdy wyrażają U1 i I1 poprzez U2 i I2,
jako równania łańcuchowe odwrotne, gdy wyrażają U2 i I2 poprzez U1 i I1,
jako równania impedancyjne, gdy wyrażają U1 i U2 poprzez I1 i I2,
jako równania admitancyjne, gdy wyrażają I1 i I2 poprzez U1 i U2,
jako równania hybrydowe, gdy wyrażają U1 i I2 poprzez I1 i U2,
jako równania hybrydowe odwrotne, gdy wyrażają I1 i U2 poprzez U1 i I2.
Zależności te wyraża się zwykle poprzez tzw. macierze czwórnika. Zastosowanie tych zależności zależy od rodzaju zagadnienia.
2.2. Macierz łańcuchowa czwórnika
W instrukcji ograniczymy się do podania wzorów dotyczących równań łańcuchowych czwórnika, tj.

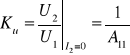
Macierz A nosi nazwę macierzy łańcuchowej. Jej poszczególne elementy określa się następująco:

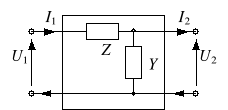
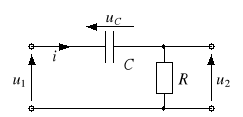
Wynika stąd, że współczynniki te można łatwo wyznaczyć z pomiarów w stanie jałowym (I2 = 0) oraz w stanie zwarcia (U2 = 0). Rozważmy przykładowo czwórnik 
(rys. 2).
a) |
b) |
c) |
|
|
|
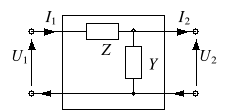
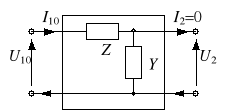
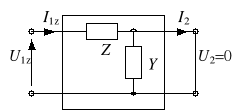
Rys. 2. Czwórnik typu 
(a), stan jałowy (b) i stan zwarcia (c)
Dla stanu jałowego (I2 = 0) otrzymujemy (rys. 2b)
![]()
skąd
![]()
Z kolei dla stanu zwarcia otrzymujemy (rys. 2c)
![]()
skąd
![]()
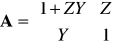
Zatem macierz łańcuchowa czwórnika typu 
wynosi
2.3. Transmitancja napięciowo-napięciowa
Transmitancję napięciowo-napięciową czwórnika w stanie jałowym określamy jako
Jeżeli napięcie wejściowe jest sinusoidalnie zmienne, to również napięcie wyjściowe jest sinusoidalnie zmienne. Wtedy U1 i U2 są zespolonymi wartościami skutecznymi odpowiednich napięć, a transmitancja Ku jest liczbą zespoloną, zależną od pulsacji . Liczbę tę można przedstawić graficznie na płaszczyźnie zespolonej w postaci punktu. Gdy zmienia się od 0 do ∞, punkty te układają się w krzywą zwaną hodografem lub charakterystykę amplitudowo-fazową transmitancji Ku. Czasami wygodniej jest przedstawić oddzielnie zależność |Ku| od (ch-ka amplitudowa) oraz argKu od (ch-ka fazowa). Często używa się zależności 20log|Ku| od - jest to tzw. amplitudowa charakterystyka logarytmiczna modułu transmitancji. Bardzo często oś pulsacji skaluje się logarytmicznie.
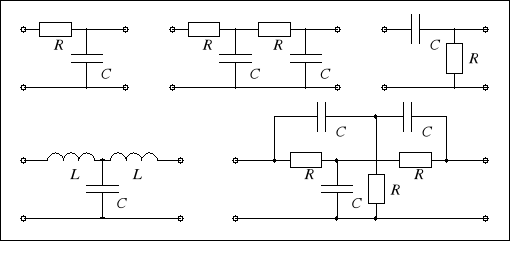
Poniżej zestawiono transmitancje Ku wybranych typów czwórników, a na rysunku 3 pokazano charakterystyki częstotliwościowe czwórnika typu 
dla Z = R i Y = jC.
Czwórnik typu |
|
|
|
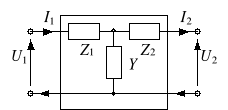
Czwórnik typu T |
|
|
|

Czwórnik typu |
|
|
|
Symetryczny czwórnik typu TT |
|
|
|
a) |
b) |
c) |
|
|
|
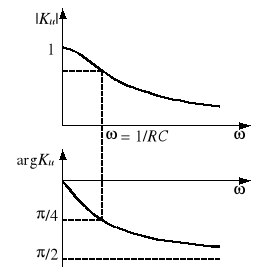
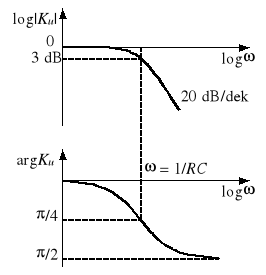
Rys. 3. Charakterystyki częstotliwościowe Ku() czwórnika 
dla Z = R, Y = jC:
a) hodograf, b) ch-ka amplitudowa i fazowa, c) 20log|Ku| i argKu z logarytmiczną skalą osi
2.4. Parametry falowe czwórnika symetrycznego
Czwórnik nazywamy odwracalnym, gdy stosuje się do niego twierdzenie o wzajemności. Dla czwórnika odwracalnego detA = 1.
Czwórnik nazywamy symetrycznym, gdy po zamianie miejscami wejścia i wyjścia rozkład prądów i napięć w obwodzie poza czwórnikiem nie zmieni się. Dla czwórnika symetrycznego macierz A-1 = A. Oznacza to, że czwórnik symetryczny jest odwracalny, a ponadto A11 = A22. Wobec tego czwórnik symetryczny określony jest jedynie dwoma niezależnymi parametrami, gdyż mamy dodatkowo zależności detA = 1 oraz A11 = A22.
Impedancją charakterystyczną (zwaną też falową) czwórnika symetrycznego nazywamy taką impedancję Zc, która dołączona do wyjścia czwórnika powoduje, że impedancja wejściowa czwórnika jest także równa Zc. Można pokazać, że jest ona równa

Współczynnikiem przenoszenia czwórnika symetrycznego nazywamy taką liczbę γ, że gdy czwórnik jest obciążony impedancją falową, to
![]()
Można pokazać, że
![]()
Współczynnikiem tłumienia nazywamy część rzeczywistą współczynnika przenoszenia
![]()
Współczynnikiem fazowym nazywam część urojoną współczynnika przenoszenia
![]()
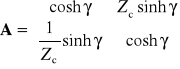
Można też pokazać, że
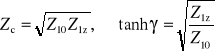
gdzie Z10 - impedancja wejściowa w stanie jałowym, Z1z - impedancja wejściowa w stanie zwarcia. Pozwala to wyznaczyć parametry Zc i γ, a tym samym macierz A, na podstawie pomiarów impedancji w stanie zwarcia i w stanie jałowym. Macierz A jest równa
2.5. Filtry LC
Filtr - urządzenie przepuszczające bez tłumienia (lub ze stosunkowo małym tłumieniem) sygnały w określonym paśmie częstotliwości, a tłumiące sygnały poza tym pasmem. W teorii obwodów rozróżnia się wiele rodzajów filtrów, m.in. filtry LC, filtry RC oraz filtry aktywne.
W filtrach LC pasmo przepuszczania filtru definiuje się jako zakres częstotliwości (lub pulsacji), dla których = 0. Ponieważ
![]()
to dla = 0 otrzymujemy
![]()
skąd wynika, że w paśmie przepuszczania
![]()
Wobec tego równania
![]()
wyznaczają granice pasma przepustowego. Jeśli obciążenie jest falowe (Z2 = Zc) to w paśmie przepuszczania napięcie wyjściowe U2 równa się
![]()
a więc jest równe co do modułu napięciu U1, lecz opóźnia się o kąt .
Dla filtru LC typu T (Z1 = Z2 = jL/2, Y = jC) mamy
![]()
skąd wynika, że pasmo przepuszczania znajduje się w zakresie pulsacji (wynikającym ze wzoru |A11| ≤ 1)
![]()
Jest to więc filtr dolnoprzepustowy. Można pokazać, że
Dla pulsacji < 0 ma ona charakter rezystancyjny, a dla > 0 - indukcyjny.
Analogiczne zależności otrzymuje się dla filtru LC typu (Y1 = Y2 = jC/2, Z = jL).
2.6. Filtr pasmowo zaporowy RC typu TT
Przyjmując w czwórniku TT
![]()
i oznaczając = RC, otrzymuje się
![]()
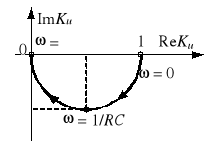
Charakterystyki czwórnika pokazano na rysunku 4.
a) |
b) |
|
|
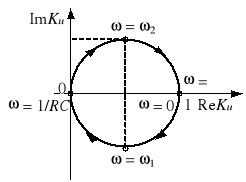
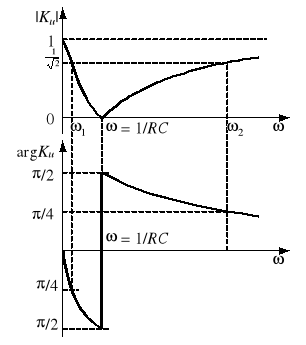
Rys. 4. Charakterystyki częstotliwościowe Ku() czwórnika TT dla Z1= R, Y1 = j2C, Z2 = 1/jC, Y2 = 2/R
Z rysunku 4 wynika, że rozpatrywany czwórnik jest filtrem pasmowozaporowym, przy czym pasmo zaporowe wyznacza zakres 1÷2. W tym paśmie |Ku| ≤ 1/√2, tzn. 20log|Ku| ≤ 3 dB. Pulsacje graniczne są równe

2.7. Układy różniczkujące i całkujące RC
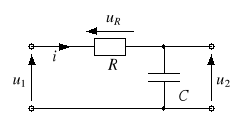
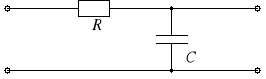
Rozważmy czwórnik typu 
pokazany na rysunku 5a. Wartość chwilowa napięcia u2 w stanie jałowym wynosi
![]()
Ponadto u1 = uR + u2. Dla uR >> u2 mamy więc w przybliżeniu u1 ≈ uR, czyli
![]()
Jest to zatem układ całkujący. Należy jednak zwrócić uwagę, że warunek uR >> u2 nie zawsze jest spełniony. W odniesieniu do napięć sinusoidalnie zmiennych w czasie warunek ten będzie spełniony, jeśli R >> 1/C, czyli dla >> 1/RC.
a) |
b) |
|
|
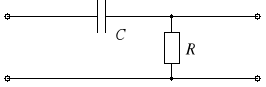
Rys. 5. Układ całkujący RC (a) i różniczkujący (b)
Podobnie w czwórniku 
pokazanym na rysunku 5b mamy
![]()
Ponadto u1 = uC + u2. Dla uC >> u2 mamy więc w przybliżeniu u1 ≈ uC, czyli
![]()
Jest to zatem układ różniczkujący. Należy jednak zwrócić uwagę, że warunek uC >> u2 nie zawsze jest spełniony. W odniesieniu do napięć sinusoidalnie zmiennych w czasie warunek ten będzie spełniony, jeśli 1/C >> R, czyli dla << 1/RC.
3. Przebieg ćwiczenia
Ćwiczenie może być wykonywane na dwóch różnych stanowiskach.
3.1. Stanowisko modelowe 1
Stanowisko składa się z płytki, na której znajdują się wybrane czwórniki. Schemat płytki pokazano na rysunku 6. Wartości parametrów elementów znajdujących się na płytce wynoszą:
R = 1 k,
L = 0,24 H,
C = 220 nF.
Rys. 6. Widok panelu płytki do badania czwórników
Na wejście badanego czwórnika podłączamy generator napięcia sinusoidalnego, na wyjście woltomierz cyfrowy (woltomierz V1 znajduje się w generatorze) - rys. 7. Oscyloskop służy do pomiaru przesunięcia fazowego. W tym celu do kanału A oscyloskopu podajemy napięcie wejściowe, a do kanału B - wyjściowe.
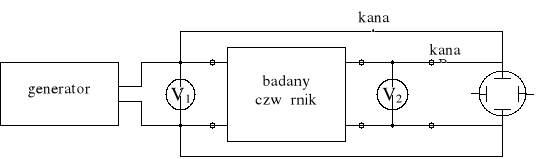
Rys. 7. Schemat układu pomiarowego
3.2. Stanowisko modelowe 2
Stanowisko modelowe zawiera:
generator napięcia sinusoidalnego,
cztery zestawy elementów R, L i C,
mierniki napięcia wejściowego i wyjściowego,
miernik przesunięcia fazowego między napięciem wyjściowym a wejściowym.
Generator ma możliwość regulacji częstotliwości w zakresie od 160 Hz do 32 kHz oraz amplitudy od 0 do 1500 mV. Każdy z elementów R, L, C w każdym z czterech zestawów elementów może zostać nastawiony na jedną z trzech wartości (tabela 1). Wyprowadzone zaciski pozwalają na zbudowanie szerokiej gamy czwórników. Ponadto istnieje możliwość podłączenia oscyloskopu na wejście i wyjście układu. Widok panelu czołowego stanowiska laboratoryjnego przedstawia rysunek 8.
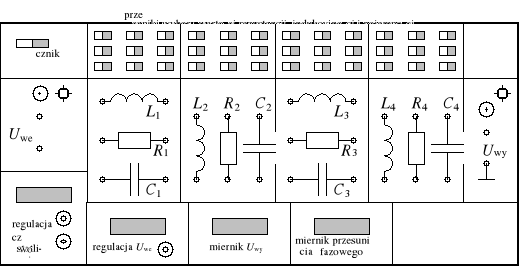
Rys. 8. Widok panelu czołowego stanowiska laboratoryjnego
Tabela 1
Lp. |
R, |
L, mH |
C, F |
1 |
47 |
2,2 |
8,2 |
2 |
22 |
1,2 |
4,7 |
3 |
10 |
0,47 |
2,2 |
3.3. Badanie układu całkującego i różniczkującego typu RC
Zestawić układ całkujący typu RC (rys. 9) (UWAGA: w przypadku zastosowania stanowiska 2 należy użyć rezystora dekadowego),
|
WERSJA 1 R = 1 k C = 220 F |
WERSJA 2 R = 10 k C = 2.2 F |
Rys. 9.
Zmieniając częstotliwość w granicach od 200 Hz do 2 kHz i utrzymując napięcie U1 = 1 V, zmierzyć napięcie U2 oraz przesunięcie fazowe (tabela 2),
Pomiary powtórzyć dla układu różniczkującego RC (rys. 10).
|
WERSJA 1 R = 1 k C = 220 F |
WERSJA 2 R = 10 k C = 2.2 F |
Rys. 10.
Tabela 2
f, Hz |
|
|
|
|
|
|
|
|
|
U2, V |
|
|
|
|
|
|
|
|
|
argKu, ° |
|
|
|
|
|
|
|
|
|
|Ku| |
|
|
|
|
|
|
|
|
|
3.4. Badanie czwórnika RC typu podwójne 
Zestawić układ całkujący typu RC (rys. 11) (UWAGA: w przypadku zastosowania stanowiska 2 należy użyć rezystorów dekadowych),
|
WERSJA 1 R = 1 k C = 220 F |
WERSJA 2 R = 10 k C = 2.2 F |
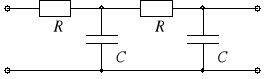
Rys. 11.
Pomiary jak w punkcie 3.3.
3.5. Wyznaczanie transmitancji Ku czwórnika typu TT
Zestawić czwórnik pokazany na rysunku 12,
|
WERSJA 1 R1 = 1 k R2 = 1 k C1 = 220 F C2 = 220 F |
WERSJA 2 R1 = 47 R2 = 22 C1 = 8,2 F C2 = 4,7 F |
WERSJA 3 R1 = 250 R2 = 125 C1 = 2 F C2 = 1 F |
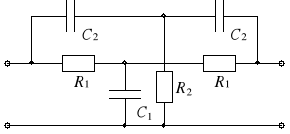
Rys. 12.
Zmieniając częstotliwość od 200 Hz do 2 kHz i utrzymując U1 = 1 V, zapisywać wyniki w tabeli 2 (uchwycić minimum napięcia wyjściowego).
3.6. Badanie filtrów dolnoprzepustowych typu T i
Zestawić filtr LC typu T pokazany na rysunku 13,
|
WERSJA 1 L/2 = 0,24 H C = 220 F |
WERSJA 2 L/2 = 0,47 mH C = 2.2 F |
WERSJA 3 L/2 = 10 mH C = 15 nF |
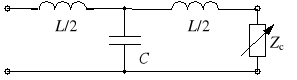
Rys. 13.
Określić częstotliwość graniczną f0:
![]()
Jako obciążenie podłączyć opornik dekadowy, którego wartość należy ustawiać po każdej zmianie częstotliwości na wartość równą impedancji charakterystycznej Zc:
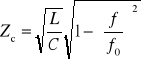
Zmieniając częstotliwość od 200 Hz do f0 i utrzymując U1 =1 V oraz Z2 = Zc, mierzyć napięcie wyjściowe oraz przesunięcie fazowe (tabela 3),
Pomiary powtórzyć dla filtra LC typu (rys. 14), przy czym wtedy
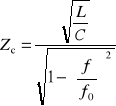
|
WERSJA 1 L = 0,24 H C/2 = 220 F |
WERSJA 2 L = 0,47 mH C/2 = 2.2 F |
WERSJA 3 L = 10 mH C/2 = 15 nF |
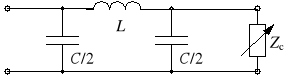
Rys. 14.
Tabela 3
f, Hz |
|
|
|
|
|
|
|
|
|
Zc, |
|
|
|
|
|
|
|
|
|
U2, V |
|
|
|
|
|
|
|
|
|
argKu, ° |
|
|
|
|
|
|
|
|
|
|Ku| |
|
|
|
|
|
|
|
|
|
4. Opracowanie sprawozdania
Cel ćwiczenia.
Schematy pomiarowe i tabele wyników.
Parametry i dane znamionowe zastosowanych przyrządów.
Przykłady obliczeń poszczególnych wartości podanych w tabelach.
Dla każdego badanego czwórnika wyznaczyć teoretyczną ch-kę Ku(). Na podstawie otrzymanych zależności wykreślić |Ku()| argKu() oraz hodografy Ku() dla wszystkich badanych czwórników i nanieść punkty otrzymane z pomiarów; porównać wartości teoretyczne i zmierzone.
Wnioski.
5. Pytania sprawdzające
Co to jest czwórnik?
Podać równania łańcuchowe czwórnika.
Podać inne rodzaje równań (impedancyjne, admitancyjne itd.).
Jak doświadczalnie można wyznaczyć macierz łańcuchową czwórnika?
Co to jest transmitancja napięciowo-napięciowa?
Wymienić i omówić charakterystyki częstotliwościowe czwórnika na przykładzie transmitancji napięciowo-napięciowej.
Co to jest czwórnik odwracalny, a co symetryczny?
Ile niezależnych wielkości określa czwórnik symetryczny?
Omówić parametry falowe czwórnika symetrycznego.
Jak z pomiarów można wyznaczyć parametry falowe czwórnika symetrycznego?
Co to jest filtr?
Co to jest pasmo przenoszenia filtru?
Jak na podstawie macierzy łańcuchowej można wyznaczyć pasmo przenoszenia filtru LC?
Wyprowadzić wzór na Ku dla filtru TT.
Omówić działanie układu różniczkującego RC.
Omówić działanie układu całkującego RC.
Literatura
[1] Bolkowski S.: Elektrotechnika teoretyczna, tom I - teoria obwodów elektrycznych, WNT, W-wa 1986, ss. 357-419.
[2] Cholewicki T.: Elektrotechnika teoretyczna, tom I, WNT, W-wa 1967, ss. 699-805.
[3] Krakowski M.: Elektrotechnika teoretyczna, tom I - obwody liniowe i nieliniowe, PWN, W-wa 1991, ss. 350-398.
[4] Kurdziel R.: Podstawy elektrotechniki, WNT, W-wa 1972, ss. 746-778.
[5] Rajski Cz.: Teoria obwodów, tom 1, WNT, W-wa 1971, ss. 233-286.
Dodatek
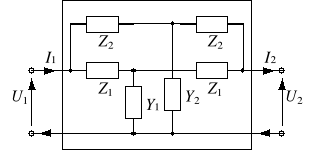
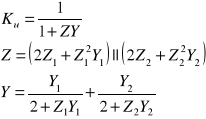
Dla czwórnika symetrycznego typu TT, w którym
![]()
otrzymuje się
przy czym = RC.
Badanie czwórników
10
Politechnika Częstochowska, Wydział Elektryczny, Katedra Elektrotechniki
Wyszukiwarka
Podobne podstrony:
5880
5880
5880
5880
5880
5880
5880
więcej podobnych podstron