LABORATORIUM |
||||
NR-CWICZENIA XII |
DATA WYKONANIA ĆW 28.01.2000 |
DATA ODDANIA SPRAWO.
|
||
TEMAT ĆWICZENIA: Ocena dokladności odbiornika SHIPMATE RS 5300 sytemu GPS |
||||
ROK: GRUPA:
III TMz A |
IMIĘ I NAZWISKO
Jacek Filoda |
OCENA:
PODPIS PROWADZĄCEGO
|
||
I CEL CWICZENIA.
Celem tego ćwiczenia jest określenie dokładności wskazań odbiornika SHIPMATE RS 5300 systemu GPS, oraz zapoznania się z jego obsługą. Z otrzymanych pomiarów należało sporządzić charakterystyki statyczne opisujące błędy i odchylenia zmiennych pozycji od wartości oczekiwanej.
II OPIS UKLADU.
Układ ten składa się z odbiornika systemu GPS, którego antena odbiorcza umieszczona jest na pomoście antenowym. Odbiornik ten może współpracować z wieloma urządzeniami np. VIDEOPLOTER RS 2500
III PRZEBIEG WYKONANIA CWICZENIA.
Po zapoznaniu się z instrukcją obsługi odbiornika i sposobem prezentacji danych przystąpiliśmy do wykonania pomiarów.
Wszystkie odczytane wartości zostały zapisane w tabeli przygotowanej wcześniej zgodnie z instrukcją do ćwiczenia.
IV PANEL STERUJACY.
HELP- dostarcza pomocniczych informacji
TOGGLE- przełącznik opcji
CLEAR- kasuje błędne dane
LIGHT- jasność (regulacja)
RED LIGHT- kontrast
2* CLEAR - wyłącza wyświetlacz
Lp |
Szerokość geograficzna
ϕ |
Długość geograficzna
λ |
HDOP |
SEGMENT KOSMICZNY |
S/N POSZCZEGÓLNYCH SATELIT |
||||||
|
|
|
|
1 |
2 |
3 |
4 |
1 |
2 |
3 |
4 |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40
|
530 25,764'N 530 25,751'N 530 25,738'N 530 25,740'N 530 25,742'N 530 25,736'N 530 25,734'N 530 25,737'N 530 25,740'N 530 25,742'N 530 25,743'N 530 25,744'N 530 25,746'N 530 25,749'N 530 25,746'N 530 25,745'N 530 25,745'N 530 25,743'N 530 25,746'N 530 25,848'N 530 25,749'N 530 25,750'N 530 25,747'N 530 25,741'N 530 25,739'N 530 25,738'N 530 25,737'N 530 25,740'N 530 25,741'N 530 25,744'N 530 25,748'N 530 25,758'N 530 25,762'N 530 25,766'N 530 25,769'N 530 25,766'N 530 25,766'N 530 25,756'N 530 25,754'N 530 25,751'N |
14033,836'E 14033,848'E 14033,805'E 14033,786'E 14033,778'E 14033,787'E 14033,789'E 14033,796'E 14033,804'E 14033,817'E 14033,827'E 14033,837'E 14033,849'E 14033,854'E 14033,825'E 14033,811'E 14033,808'E 14033,818'E 14033,811'E 14033,807'E 14033,804'E 14033,805'E 14033,815'E 14033,819'E 14033,818'E 14033,815'E 14033,814'E 14033,810'E 14033,808'E 14033,806'E 14033,807'E 14033,807'E 14033,807'E 14033,806'E 14033,807'E 14033,810'E 14033,811'E 14033,821'E 14033,824'E 14033,826'E |
1,3 1,3 1,9 1,9 1,9 1,9 1,9 2,9 2,0 2,0 2,0 2,0 2,0 2,0 2,0 2,1 2,1 2,3 2,3 2,3 2,5 2,5 2,7 2,7 2,7 2,7 2,7 2,7 2,7 2,7 3,7 3,7 3,7 3,7 3,7 3,7 3,7 3,7 3,7 3,7
|
2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 |
5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5 |
7 7 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21 21
|
21 21 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 26 |
14 12 12 9 10 12 13 13 13 12 13 12 12 12 12 11 11 9 10 10 10 10 8 10 11 11 10 10 12 11 10 10 9 9 9 8 13 13 14 10 |
12 10 11 11 10 11 14 11 12 12 11 11 12 11 12 12 11 12 13 13 14 13 13 14 13 14 13 14 12 12 11 10 13 12 11 12 13 12 13 13
|
11 13 12 12 12 13 14 12 13 13 13 12 13 12 13 12 12 12 14 12 13 13 13 13 13 13 13 14 14 13 14 13 12 13 15 14 14 14 13 13 |
14 12 12 12 11 14 14 13 13 13 12 13 13 12 13 13 13 13 11 12 12 11 12 13 12 14 13 14 14 13 13 15 14 15 13 15 15 13 14 14 |
Obliczam średnią arytmetyczną dla
ϕśr = 530 25,750' λśr = 0140 33,813'
2)
Δϕi= ϕi - ϕśr ai = (λi -λśr)*cosϕśr
Lp |
Δϕi |
ai |
S/Nśr |
HDOP |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 3637 38 39 40
|
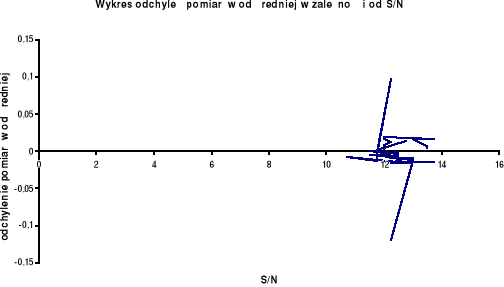
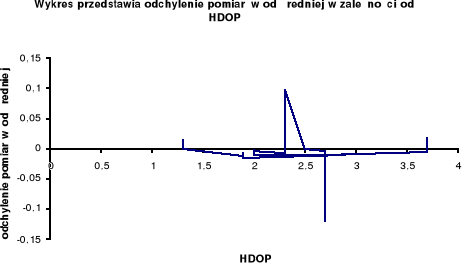
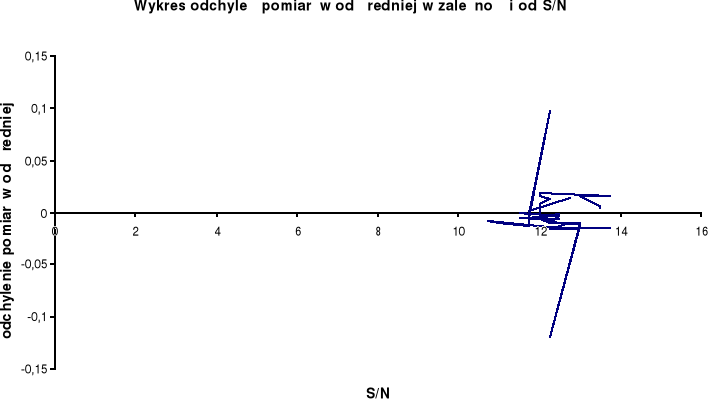
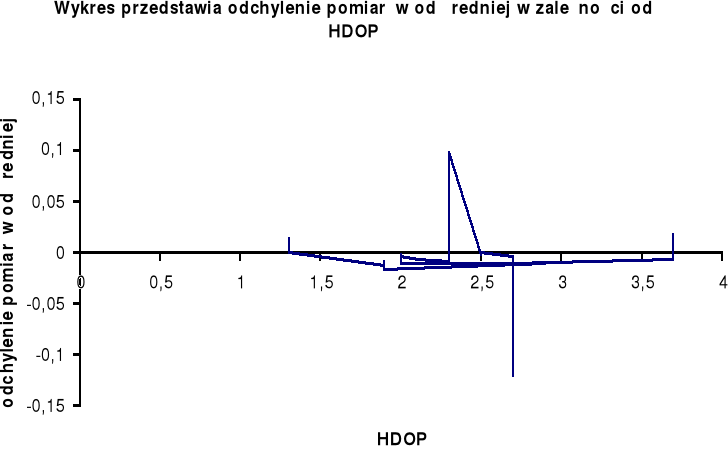
0,014 0,001 -0,012 -0,010 -0,008 -0,014 -0,016 -0,013 -0,010 -0,008 -0,007 -0,006 -0,004 -0,001 -0,004 -0,005 -0,005 -0,007 -0,004 0,098 -0,001 0 -0,003 -0,009 -0,011 -0,012 -0,013 -0,010 -0,009 -0,006 -0,002 0,008 0,012 0,016 0,019 0,016 0,016 0,006 0,004 0,001 |
0,01902 0,02894 -0,00661 -0,02232 -0,02894 -0,02150 -0,01984 -0,01405 -0,00744 0,00330 0,011578 0,019848 0,029772 0,033907 0,009924 -0,00165 -0,00413 0,004135 -0,001654 -0,004962 -0,007443 -0,005789 0,001654 0,004962 0,004135 0,001654 0,000827 -0,002481 -0,004135 -0,005789 -0,004962 -0,004962 -0,004962 -0,005789 -0,004962 -0,002481 -0,001654 0,006616 0,009097 0,010751
|
12,75 11,75 11,75 11,00 10,75 12,50 13,75 12,25 12,75 12,50 12,25 12,00 12,50 11,75 12,50 12,00 11,75 11,50 12,00 11,75 12,25 11,75 11,50 12,50 12,25 13,00 12,25 13,00 13,00 12,25 12,00 12,00 12,00 12,25 12,00 12,00 13,75 13,00 13,50 12,50
|
1,3 1,3 1,9 1,9 1,9 1,9 1,9 2,9 2,0 2,0 2,0 2,0 2,0 2,0 2,0 2,1 2,1 2,3 2,3 2,3 2,5 2,5 2,7 2,7 2,7 2,7 2,7 2,7 2,7 2,7 3,7 3,7 3,7 3,7 3,7 3,7 3,7 3,7 3,7 3,7 |
Obliczam błąd kołowy
a) odchylenie standardowe
mϕ =± 0,026128 [Mm] ma =±0,050236 [Mm]
b)średni błąd sredniej arytmetycznej
m'ϕ =0,004131199 [Mm] m'a =0,007943009 [Mm]
3) Na podstawie wyliczonych powyżej średnich błędów kwadratowych pomiarów ϕ i λ
można wyznaczyć BŁĄD KOŁOWY zwany BŁĘDEM SREDNIM POZYCJI STATKU
(laboratorium).
M0 =(0,000682672 + 0,002523655)1/2 =0,0566244444
4) Obliczam współczynnik korelacji dwóch zmiennych losowych.
a) dla Δϕi - S/Nśr rΔϕi - S/Nśr =-1
b) dla Δϕi - HDOP r= -1
c) dla ai - S/Nśr r=-1
d) dla ai - HDOP r=-1
1
5