|
|||
wydział EAiE
|
rok III |
||
tytuł ćwiczenia silnik asynchroniczny pierścieniowy dźwigowy |
wykonali 1.Michał Leśniewski 2.Jan Połabiński 3.Jacek Parys 4.Andrzej Smorąg |
||
data wykonania 07-01-98 |
data oddania 21-01-98 |
ocena |
|
1. Dane znamionowe silnika.
typ - SZUD58
moc znamionowa - PN = 2,2 [kW]
napięcie znamionowe fazowe - Us = 500 [V]
napięcie znamionowe wirnika - Uw = 72 [V]
prędkość znamionowa obrotowa - nN = 700
prąd znamionowy fazowy - Is = 7 [A]
prąd znamionowy wirnika - Iw = 25 [A]
2. Schemat układu pomiarowego.
3.Wyniki pomiarów potrzebne do wyznaczenia charakterystyk mechanicznych M = f(s)
dla U = 280 V przy różnych Rdw . Charakterystyki narysowaliśmy na jednym wykresie.
Korzystając ze wzoru obliczamy poślizg s = .
silnik zwarty
|
Rdw1 = 0.08[Ω] |
Rdw2 = 0.159[Ω] |
Rdw3 = 0.232[Ω] |
||||||||
n [] |
s |
M [N⋅m] |
n [] |
s |
M [N⋅m] |
n [] |
s |
M [N⋅m] |
n [] |
s |
M [N⋅m] |
125 |
0.83 |
5.5 |
150 |
0.80 |
7 |
150 |
0.80 |
7.8 |
150 |
0.80 |
8.75 |
200 |
0.73 |
6 |
200 |
0.73 |
7.5 |
200 |
0.73 |
8 |
200 |
0.73 |
9 |
300 |
0.60 |
6.5 |
250 |
0.67 |
8 |
250 |
0.67 |
8.5 |
250 |
0.67 |
9 |
400 |
0.47 |
7.5 |
300 |
0.60 |
8.25 |
300 |
0.60 |
9 |
300 |
0.60 |
9 |
500 |
0.33 |
8.75 |
350 |
0.53 |
8.5 |
350 |
0.53 |
9.1 |
350 |
0.53 |
9 |
550 |
0.27 |
9 |
400 |
0.47 |
8.5 |
400 |
0.47 |
9 |
400 |
0.47 |
8.5 |
600 |
0.20 |
9 |
450 |
0.40 |
9 |
450 |
0.40 |
8.7 |
450 |
0.40 |
8.25 |
650 |
0.13 |
7.5 |
500 |
0.33 |
8.25 |
500 |
0.33 |
8.25 |
500 |
0.33 |
7.5 |
700 |
0.07 |
4.5 |
550 |
0.27 |
8.25 |
550 |
0.27 |
4.5 |
550 |
0.27 |
6.5 |
750 |
0.00 |
0.5 |
600 |
0.20 |
7.25 |
600 |
0.20 |
6.25 |
600 |
0.20 |
5.5 |
800 |
-0.07 |
-5 |
650 |
0.13 |
5.25 |
650 |
0.13 |
4.5 |
650 |
0.13 |
4 |
850 |
-0.13 |
-10.25 |
700 |
0.07 |
2.75 |
700 |
0.07 |
2.5 |
700 |
0.07 |
2 |
900 |
-0.20 |
-12.25 |
750 |
0.00 |
1.25 |
750 |
0.00 |
1.4 |
750 |
0.00 |
1.5 |
950 |
-0.27 |
-12.75 |
800 |
-0.07 |
-3.75 |
800 |
-0.07 |
-3.5 |
800 |
-0.07 |
-3 |
1000 |
-0.33 |
-12.5 |
850 |
-0.13 |
-7 |
850 |
-0.13 |
-5.5 |
850 |
-0.13 |
- 4.5 |
|
|
|
900 |
-0.20 |
-9.5 |
900 |
-0.20 |
-8 |
900 |
-0.20 |
-7 |
|
|
|
950 |
-0.27 |
-11.5 |
950 |
-0.27 |
-9.5 |
950 |
-0.27 |
-8.5 |
|
|
|
1000 |
-0.33 |
-12.5 |
1000 |
-0.33 |
-11 |
1000 |
-0.33 |
-10 |
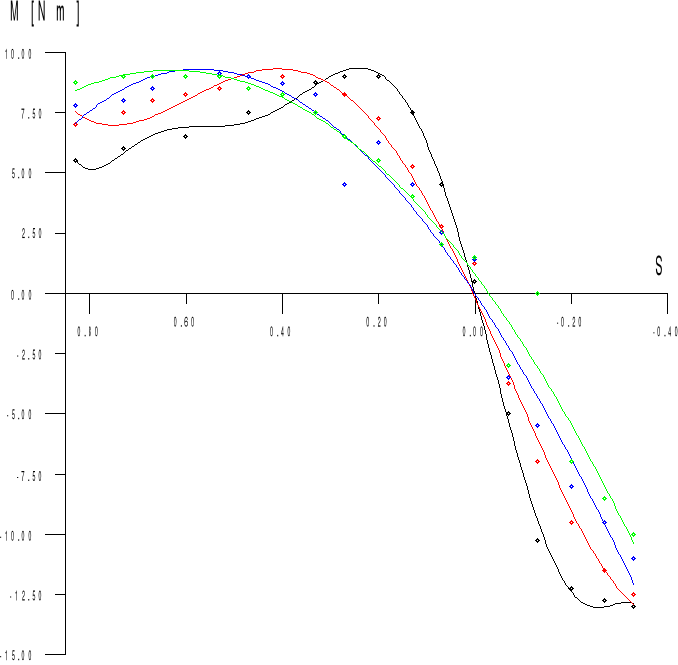
_ silnik zwarty
_ rezystancja Rdw1
_ rezystancja Rdw2
rezystancja Rdw3
4. Pomiar pozwalający określić znamionową sprawność metodą bezpośrednią.
⋅100%
=
=
|
|
|
|
|
|
[%] |
1 |
665 |
69 |
30 |
2070 |
3000 |
73 |
2 |
620 |
65 |
40 |
2600 |
4020 |
69 |
η = 71[%]
5. Wnioski wynikające z łączenia rezystancji w obwód wirnika.
Silniki pierścieniowe są normalnie uruchamiane z dołączoną do wirnika dodatkową
rezystancją rozruchową. Powiększenie rezystancji w obwodzie wirnika powoduje
powiększenie poślizgu krytycznego i zmniejszenie prądu wirnika a także stojana.
Równocześnie zwiększa się moment rozruchowy, uzyskując wartość największą,
równą momentowi maksymalnego, dla rezystancji tak dobranej, by poślizg krytyczny
równy był jedności. Dalsze powiększenie tej rezystancji powoduje zmniejszenia
momentu rozruchowego. Potwierdzą to nasze charakterystyki wynikające
z przeprowadzonych pomiarów zawartych w tabeli.
6. Właściwości silnika asynchronicznego pierścieniowego powszechnie stosowanego do
napędu udźwigów.
wystarczający moment krytyczny potrzebny do napędów dźwigowych
wartość momentu początkowego może być zmieniana
może być użyty jako hamulec elektryczny
silnik jest bardzo pewny w pracy, konserwacja jest nieskomplikowana
i niekosztowna
7. Sposoby regulacji prędkości silników pierścieniowych.
przez zmianę rezystancji w obwodzie wirnika
zmiana częstotliwości zasilającej
zmiana momentu mechanicznego
Wyszukiwarka
Podobne podstrony:
4872
4872
04 Tworzywa sztuczneid 4872 ppt
4872
4872
4872
więcej podobnych podstron