Zależność między siłą poprzeczną, wzdłużną i kątem znoszenia.
Cel stosowania ABS.
przeciwdziałanie blokowaniu kół podczas hamowania,
zachowanie kierowalności pojazdu
Jakie informacje wykorzystuje układ przeciwblokujący ABS?
Przyspieszenia (opóźnienia) koła,
Prędkość obrotową koła,
Kryteria wg których następuje regulacja poślizgu kół w układzie ABS.
Regulacja poślizgu kół odbywa się na podstawie analizowanego opóźnienia. Na podstawie wartości tego opoźnienia regulowane jest ciśnienie płynu hamulcowego w procesie trójstanowym.
Co to znaczy regulacja trójstanowa w układzie ABS?
Regulacja trójstanowa, oznacza że ingerencja układu ABS w proces hamowania może być zrealizowana tylko poprzez:
Zwiększenie ciśnienia płynu hamulcowego w układzie,
Zmniejszenie ciśnienia płynu hamulcowego w układzie,
Ewentualnie pozostawienie ciśnienia na aktualnym poziomie.
Układ iteracyjnie dąży do osiągnięcia żądanego opóźnienia poprzez ciągły pomiar w sprzężeniu zwrotnym.
Zastosowany jest regulator trójstanowy w układzie ABS
Regulator trójstanowy.
To taki typ regulatora, w którym wyjście może przyjmować dwa stany aktywne oraz stan wyłączenia. Ustawiana jest wartość zadana oraz szerokość strefy nieczułości. Jeżeli stan obiektu mieści się w strefie nieczułości otaczającej wartość zadaną, to wyjście regulatora pozostaje nieaktywne. Jeżeli stan obiektu przekroczy strefę nieczułości ponad wartością zadaną, to wyjście przyjmuje stan aktywny ujemny - mający na celu skompensowanie zaistniałej zmiany stanu. Podobnie, gdy stan obiektu przekroczy strefę nieczułości w dół, to wyjście regulatora przyjmuje stan aktywny dodatni. Typowym zastosowaniem regulatora trójstanowego jest regulacja zaworu przepływowego za pomocą serwomotoru.
Podstawowe elementy hydraulicznej części układu ABS
- pompa hamulcowa
- komora tłumiąca
- pompa
- silnik
- akumulator ciśnienia
- zawory dwustanowe (po dwa na każde koło) lub zawory trójstanowe
- hamulec na każdym kole
Działanie układu ABS w przypadku hamowania na niejednorodnej nawierzchni (μ-split).
KOŁA PRZEDNIE:
- sterowanie indywidualne,
- powstaje moment obracający
KOŁA TYLNE:
- sterowanie „select low” (jednakowe siły hamowania dostosowane do przyczepności koła na śliskiej nawierzchni),
- zmniejszenie skuteczności hamowania
Stosowanie ujemnego promienia zataczania
Na czym polega działanie elektropneumatycznego układu hamulcowego?
Idea tego układu polega na umieszczeniu elektropneumatycznych zaworów regulujących dopływ sprężonego powietrza do mechanizmów hamulcowych możliwie blisko tych mechanizmów, dzięki czemu odcinek przekazywania sygnału na drodze pneumatycznej skraca się w znaczny sposób. Układ umożliwia znaczne zwiększenie szybkości działania hamulców. Same zawory sterowane są elektrycznie sygnałem generowanym w elektronicznym układzie sterującym na podstawie sygnału z czujnika położenia pedału hamulca, który został umieszczony przy głównym zaworze sterującym. W tych układach zachowano główny zawór sterujący i wszystkie części z tradycyjnego układu pneumatycznego - co pozwala na hamowanie pojazdu tylko układem pneumatycznym w przypadku awarii układu elektrycznego. W tych układach zintegrowane są funkcje układów regulacji poślizgu kół (ABS).
Cel stosowania układu elektronicznego rozdziału siły hamowania EBD
Dostosowanie rozdziału siły hamowania do pionowych obciążeń osi
Lepsze wykorzystanie przyczepności kół tylnych
Poprawa stateczności
Zastąpienie korektora mechanicznego
Zmiany obciążeń pionowych kół przy hamowaniu.
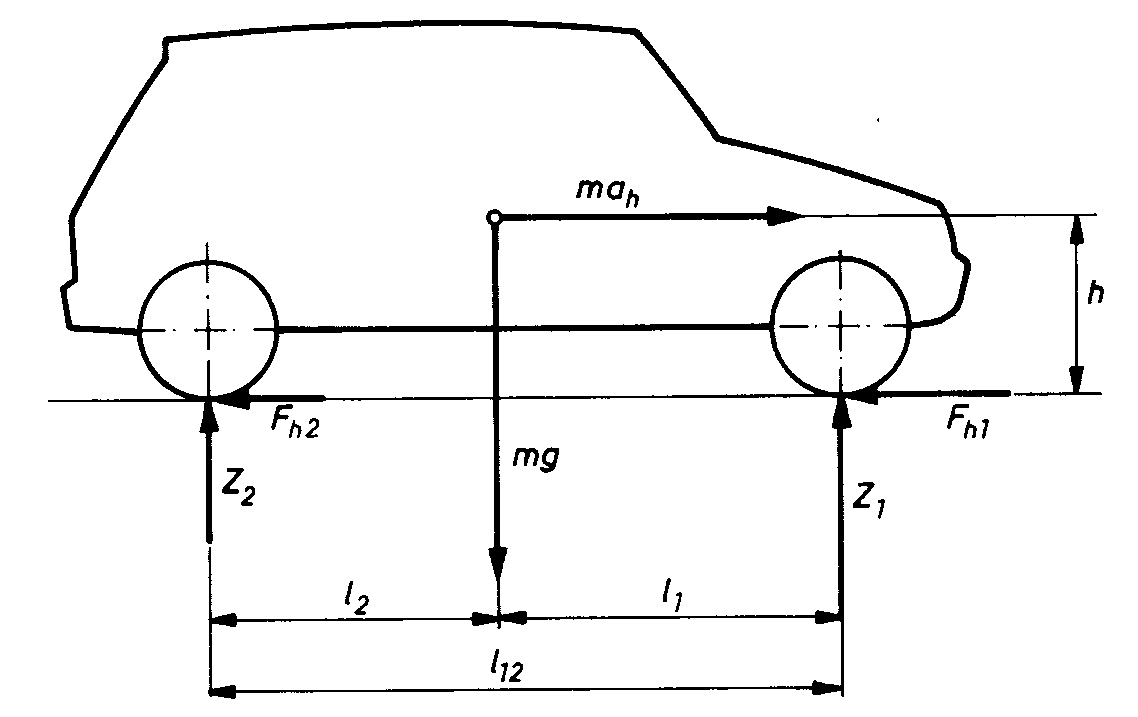
11. Zasada działania korektora mechanicznego
Korektor siły hamowania jest umieszczony miedzy pompą hamulcową, a cylinderkami tylnych hamulców i ma za zadanie nie dopuścić do blokowania tylnych kół podczas gwałtownego hamowania. Działanie korektora zależy bezpośrednio od obciążenia tylnej osi. Korektor hamowania to specyficzny zawór zmniejszający ciśnienie płynu w tylnych cylinderkach w zależności od uchylenia tłoczka korektora na które wpływa obciążenie tylnej osi oraz ciśnienie płynu hamulcowego wytworzone przez pompę w trakcie hamowania. Im więcej podczas hamowania wysunie się tłoczek korektora tym mniejsze ciśnienie dociera do cylinderków
12. Zasada działania układu elektronicznego rozdziału siły hamowania EBD
Układ EBD jest to elektroniczna wersja korektora hamowania. Przy pełnym hamowaniu czyli z wykorzystaniem maksymalnej przyczepności, o ciśnieniu w układzie hamulcowym decyduje ABS, natomiast przy niepełnym - w ruchu prostoliniowym następuje maksymalne wykorzystanie przyczepności kół tylnych, natomiast podczas jazdy po łuku następuje zmniejszenie ciśnienia dla kół tylnych, aby nie dopuścić do poślizgu
13. Cel stosowania układu regulacji poślizgu kół napędowych ASR (TCS)
Układ ASR korzysta z czujników ABS. Stosowany jest aby:
a)zapobiegać zerwaniu przyczepności kół przy ruszaniu
b)zmniejszyć poślizg boczny kół podczas jazdy po łuku - przeciwdziała pod lub nadsterowności
c)zwiększenie możliwej do przeniesienia siły napędowej gdy koła prawe i lewe stoją na nawierzchni o różnym współczynniku przyczepności
14. Jakie mechanizmy samochodu wykorzystuje do regulacji poślizgu kół napędowych układ ASR (TCS)?
a)czujniki obrotu kół - te same co w abs
b)przepustnica
c)układ hamulcowy
d)sterownik silnika
15. W jaki sposób wytwarzana jest w układzie regulacji poślizgu kół napędowych ASR (TCS) siła hamowania?
Siłę hamowania wytwarza się na 3 sposoby
Najlepszym rozwiązaniem jest sterowanie przepustnicą a także hamulcami jednocześnie
Mniej dokładne jest sterowanie przepustnicą i zapłonem.
Najprostszym jest sterowanie przepustnicą. Wadą jest mało dokładne i precyzyjne działanie
W jaki sposób układ regulacji poślizgu kół napędowych ASR (TCS) może zastąpić działanie blokady mechanizmu różnicowego?
W samochodzie wyposażonym w system kontroli trakcji, system wykrywa taki stan - gdy na śliskiej powierzchni kręci się tylko jedno z kół napędowych - system kontroli trakcji ogranicza moc silnika, a następnie włącza częściowo hamulec ślizgającego się koła, tak aby układ różnicowy mimo wszystko przeniósł moment napędowy również na drugie koło. W ten sposób, dzięki systemowi kontroli trakcji, na śliskiej powierzchni optymalnie napędzane są wszystkie koła napędowe. Należy zauważyć, iż w tym przypadku system kontroli trakcji działa jako elektroniczna blokada mechanizmu różnicowego.
Jaki jest cel stosowania blokady mechanizmu różnicowego
Mechaniczne urządzenie montowane w obudowie mechanizmu różnicowego, służące do ograniczenia lub całkowitej likwidacji różnicy prędkości obrotowej pomiędzy kołami lub (przy napędzie na dwie osie) pomiędzy osiami.. W autach terenowych stosowana jest często blokada określana jako 100-procentowa, czyli łącząca obie półosie na sztywno. Natomiast w samochodach osobowych i sportowych blokada jest częściowa, co umożliwia ograniczony uślizg pomiędzy kolami (np. 10, 30, 70 proc., gdzie liczby oznaczają, jaka część mocy przekazywanej na ślizgające koło będzie przeniesiona w skrajnym przypadku na kolo mające przyczepność). W wielu nowoczesnych pojazdach (szczególnie z napędem na obie osie) stosowana jest blokada sterowana elektronicznie, w której komputer decyduje, kiedy i w jakim stopniu ograniczyć uślizg, a wiec różnice w prędkości obrotowej kot lub osi napędzanych. Tu wykorzystuje się elementy wykonawcze elektrohydrauliczne.
Pojęcia pod- i nadsterowności
α - kąt znoszenia opon
Samochód podsterowny α1> α2
Samochód nadsterowny α1< α2
Cel stosowania układu stabilizacji toru jazdy ESP
- Zapobieganie bocznemu poślizgowi kół przy jeździe po zakręcie
- Poprawa kierowalności i stateczności
- Ułatwienie kierowcy opanowania samochodu w sytuacjach krytycznych
Parametry ruchu samochodu mierzone przez układ stabilizacji toru jazdy ESP
Wielkości uwzględniane w regulacji ESP:
α - kąty znoszenia opon,
β - kąt znoszenia pojazdu,
δ - kąt skrętu kół,
v - prędkość jazdy,
ay - przyśpieszenie boczne,
FA - siła napędowa,
FB - siła hamowania,
FS - siła boczna,
Mz - moment obracający
Mstab - moment stabilizacyjny,
Czujniki wykorzystywane w układzie stabilizacji toru jazdy ESP
- Czujniki prędkości obrotowej kół
- Czujnik kąta obrotu kierownicy
- Czujnik prędkości kątowej pojazdu
- Czujnik przyśpieszenia bocznego
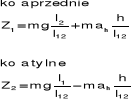
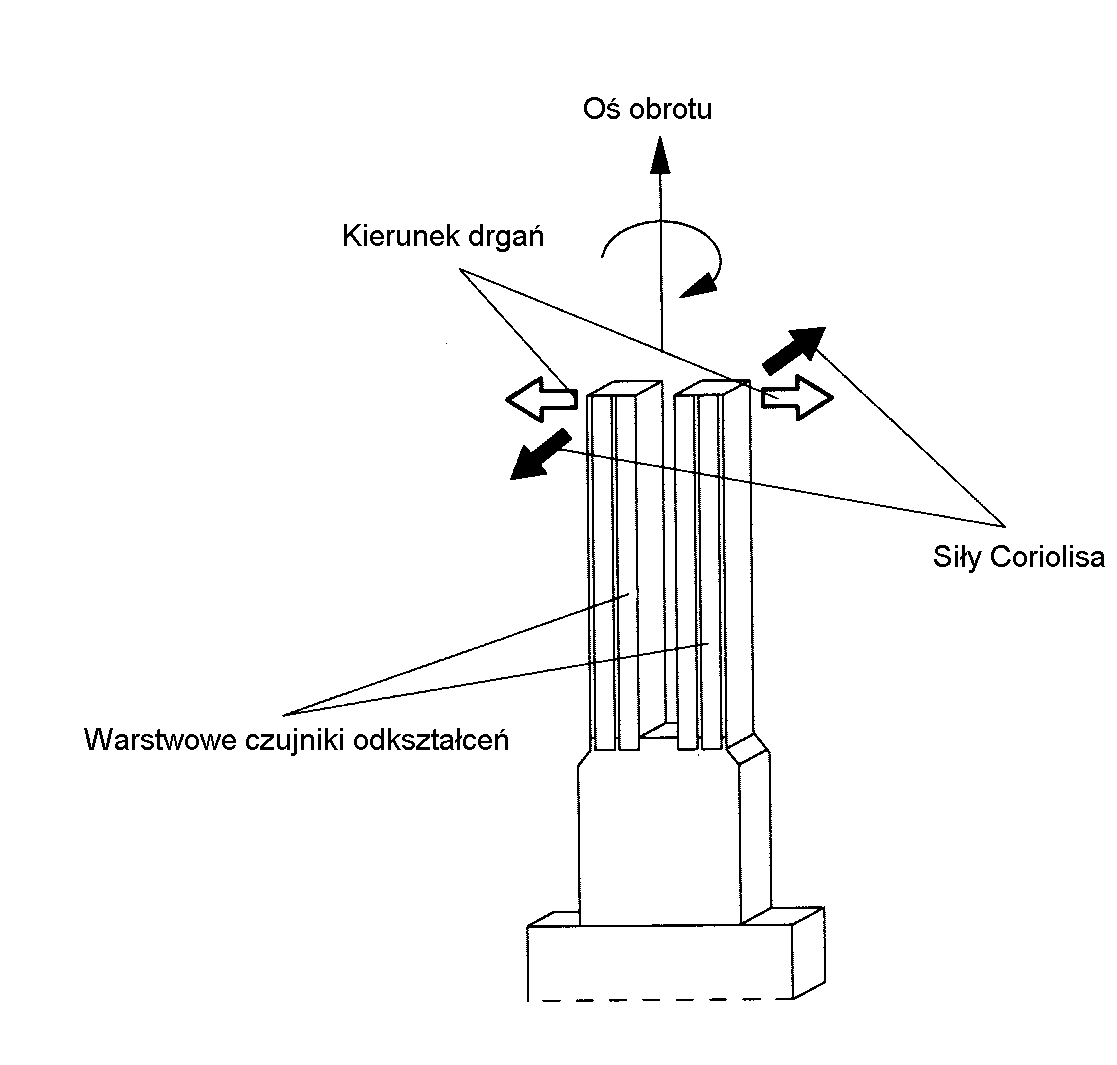
Sposób pomiaru prędkości kątowej samochodu
Czujnik obrotu nadwozia bada kąt obrotu wokół osi pionowej.
Elektroniczny moduł sterujący oblicza na podstawie danych z czujników teoretyczną prędkość obrotową wokół osi pionowej, która odpowiada chwilowemu zamierzonemu torowi jazdy i warunkom przyczepności do powierzchni jezdni. Ta prędkość porównywana jest z rzeczywistą prędkością wokół osi pionowej, która mierzona jest za pomocą czujnika żyroskopowego umieszczonego centralnie. Czujnik obrotu wokół osi pionowej działa na zasadzie wibrującego żyroskopu.
Zasada działania żyroskopowego czujnika kąta obrotu
W jaki sposób układ ESP koryguje pod- lub nadsterowność?
Zablokowane koło można poruszyć w każdą stronę (czyli także na boki) używając podobnej siły. W efekcie, na zakręcie koło jest wynoszone tam, gdzie działa siła odśrodkowa, czyli na zewnątrz zakrętu. Wykorzystując tę zasadę, gdy przód pojazdu traci przyczepność (zachodzi podsterowność), to blokowane są koła tylne, by te pozwoliły na obrót pojazdu wokół własnej osi celem skierowania przodu we właściwą stronę. Analogicznie, gdy mamy do czynienia z nadsterownością, kiedy to pojazd zbyt szybko obraca się wokół własnej osi (szybciej, niż pokonuje zakręt) blokowane są koła przednie, by spowolnić ten ruch poprzez wytworzenie niwelującej go podsterowności. Wszystkie te korekty zachodzą wielokrotnie w ciągu sekundy i tworzą w rzeczywistości kontrolowany uślizg wszystkich czterech kół. Poślizg kół jest obliczany na podstawie prędkości obrotowych kół, czujnika przyspieszenia poprzecznego, czujnika przyspieszenia kątowego, czujnika skrętu kierownicy oraz ciśnienia w układzie hamulcowym. Na podstawie analizy danych z tych czujników system określa czy wystąpiła nadsterowność czy podsterowność i odpowiednio reaguje wyhamowaniem odpowiednich kół.
α1
δ
α2
α1
α2
δ
Wyszukiwarka
Podobne podstrony:
MR-pytania i odpowiedzi, SiMR - st. mgr, pojazdy, POJAZDY samochody opracowane pytania, POJAZDY sam
Systemy bezpieczeństwa czynnego i biernego w pojazdach samochodowych
Pytania egz AGiSN, SiMR - st. mgr, Alg. i Sieci Neuronowe
MSI-ściaga, SiMR - st. mgr, Alg. i Sieci Neuronowe
opracowanie fizyka 2 kolos stary word, SiMR - st. mgr, fizyka mgr, FIZYKA II KOLO, FIZYKA II KOLO, F
MSI pierwszy kolos, SiMR - st. mgr, Alg. i Sieci Neuronowe
silniki, SiMR - st. mgr
Pytania ze sprawdzianow 2, SiMR - st. mgr, fizyka mgr, FIZYKA II KOLO, FIZYKA II KOLO, Fizyka na skl
fizyka 4 11 17, SiMR - st. mgr, fizyka mgr, FIZYKA II KOLO, FIZYKA II KOLO, fizyka-kolokwium II,
Zastosowanie Laserów w Robotyce, SiMR - st. mgr, Lasery
Bezpieczeństwo Czynne i Bierne w Pojazdach samochodowych
Systemy bezpieczeństwa narodowego 2
Ćwiczenie 2 Polska w europejskim systemie bezpieczeństwa
T 2 Podmioty systemu bezpieczeństwa państwa
Wykład VII, politechnika infa 2 st, Projektowanie Systemów Informatycznych
ODPOWIEDZIALNOSC CYWILNA PRACOWNIKOW ADMINISTRACJI PUBLICZNEJ, Bezpieczeństwo Wewnętrzne - Administr
polcja w systemie bezpieczenstwa panstwa
więcej podobnych podstron