Teoria sterowania
Laboratorium
Projektowanie liniowych układów dynamicznych w przestrzeni stanów, sterowalność i obserwowalność liniowych układów dynamicznych
Rafał Dobosz
gr. 23 A
rok II WIMiR
1. Cel ćwiczenia
- modelowanie układów dynamicznych w przestrzeni stanów,
- badanie sterowalności i obserwowalności liniowych układów dynamicznych.
2. Modelowanie układu dynamicznego:
- wielkość wejściowa: Uw
- wielkość wyjściowa: UL
- R=10Ω, L=1H, C=2F
![]()
, ![]()
, ![]()
![]()
, ![]()
![]()
![]()
Wykres odpowiedzi dla powyższego schematu:
3.Modelowanie układu dynamicznego w przestrzeni stanów.
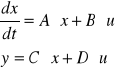
gdzie: x1=i , x2= Uc , y= UL , u= UW
![]()
![]()
![]()
![]()
![]()
Zapisanie równań stanu i wyjścia w postaci macierzowej:
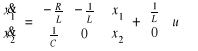
![]()
Następnie wykorzystując blok State-Space w pakiecie Simulink, po wpisaniu odpowiednich macierzy otrzymano wykres:
Jak widać odpowiedź pokrywa się z wykresem uzyskanym za pomocą poprzedniej metody. Rozwiązania obydwoma sposobami dają taki sam efekt.
3.Badanie sterowalności.
W programie Matlak macierz sterowalności możemy otrzymać za pomocą komendy Qs=ctrb(A,B), gdzie A,B - macierze parametrów układu
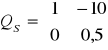
Kod programu Matlab:
A=[-10 -1;0.5 0];
B=[1;0];
Qs=ctrb(A,B);
rank(A)
rank(Qs)
Komendy rank(A) i rank(Qs),posłużyły do obliczenia rzędów macierzy A i Qs. W obu przypadkach rząd ten wyniósł 2, tak więc układ jest w pełni sterowalny.
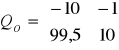
4.Badanie obserwowalności.
Za pomocą komendy Qs=obsv(A,C) w programie Matlab, otrzymujemy macierz sterowalności dla zadanych wyjść układu:
a) wyjściem układu jest UL
Kod programu Matlab:
A=[-10 -1;0.5 0];
C=[-10 -1];
Qo=obsv(A,C);
rank(Qo)
,
Za pomocą komend rank(Qs) otrzymujemy wartość rzędu macierzy Qs. Podobnie jak rząd macierzy A wynosi on 2, więc układ jest w pełni obserwowalny.
b) wyjściem układu jest UC
Kod programu Matlab:
A=[-10 -1;0.5 0];
C=[0 1];
Qo=obsv(A,C);
rank(Qo)
![]()
,
Podobnie jak w podpunkcie a) rząd macierzy QO (=2) jest równy rzędowi macierzy A, więc układ jest w pełni obserwowalny.
Wyszukiwarka
Podobne podstrony:
spr tst lab2, Mechatronika AGH IMIR, rok 2, Teoria sterowania, lab2 grzybek
TSIId Mech EGZAMIN, Mechatronika AGH IMIR, rok 2, Teoria sterowania
TS LAB 1, Mechatronika AGH IMIR, rok 2, Teoria sterowania, lab1 grzybek
moje, Mechatronika AGH IMIR, rok 2, Teoria sterowania, lab1 grzybek, sprawko ts rafał
marysi, Mechatronika AGH IMIR, rok 2, Teoria sterowania, lab1 grzybek
Tomka, Mechatronika AGH IMIR, rok 2, Teoria sterowania, lab1 grzybek
charakterystyki 2 2, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
metr-koło 4, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
STAT.KONTR.JAKOŚCI, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
sciaga 2(1), Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
wnioski 2 2, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
TMM - Projekt 6B(1), Mechatronika AGH IMIR, rok 2, TMM, 1A, 2A, 3A, 4B, 5B, 5A, 6A, 7B
Tmm sprawko 1, Mechatronika AGH IMIR, rok 2, TMM
tablice terrma2, Mechatronika AGH IMIR, rok 2, TMM, tmm
Projekt TMM 1A(1), Mechatronika AGH IMIR, rok 2, sprawozdania, TMM, inne projekty, Projekt 1a
tablice terma, Mechatronika AGH IMIR, rok 2, TMM, tmm
Dynamiczne badanie przetworników I i II rzędu, Mechatronika AGH IMIR, rok 2, sprawozdania, metrologi
tabela, Mechatronika AGH IMIR, rok 2, Metrologia sprawozdania, inncyh
TMM Laboratoria, Mechatronika AGH IMIR, rok 2, TMM
więcej podobnych podstron