Napęd (zespołu) maszyny technologicznej to silnik i (ewentualnie) mechanizm przeniesienia ruchu na organ wykonawczy (wrzeciono, stół itp.)
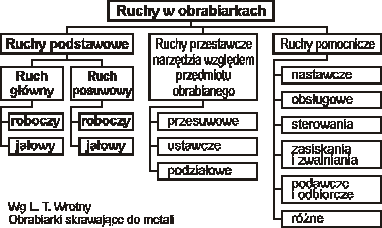
Ruchy podstawowe są to ruchy wykonywane przez elementy i zespoły robocze obrabiarki (wrzeciona, suwaki, stoły, suporty i inne) wraz z narzędziem lub przedmiotem obrabianym, niezbędne do przeprowadzenia obróbki.
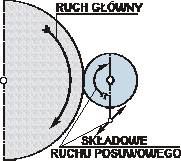
Ruch główny - decyduje o prędkości skrawania.
Ruch posuwowy - jest niezbędny do usunięcia warstwy skrawanej z całej powierzchni obrabianej. Ruch posuwowy może być ciągły lub przerywany.
Ruchy podstawowe, podczas których odbywa się skrawanie, nazywa się ruchami roboczymi, jeśli jednak nie towarzyszy im skrawanie, noszą nazwę ruchów jałowych (np. dobieg i wybieg wiertła, jałowe przejścia frezu przy frezowaniu powierzchni przerywanej itp.).
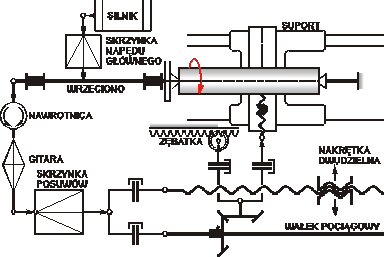
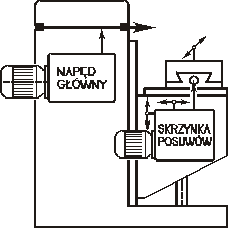
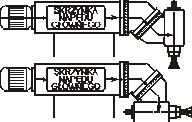
Silniki wraz z mechanizmami przeniesienia ruchu głównego i posuwowego noszą nazwę napędu głównego lub napędu posuwowego. Moc napędu posuwowego jest względnie mała - zazwyczaj nie przekracza 15% mocy napędu głównego.
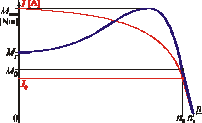
Silniki indukcyjne trójfazowe są najbardziej rozpowszechnioną odmianą silników stosowanych w napędach maszyn. Wirujące pole magnetyczne przecinając pręty klatki (prądnica) wzbudza w nich prąd, a to powoduje powstanie siły F (silnik) działającej na pręty, czyli moment obrotowy na wałku silnika.
Synchroniczna prędkość obrotowa: n= (60*f)/p f -częstotliwość prądu, p -liczba par biegunów.
Charakterystyka mechaniczna i elektryczna silnika indukcyjnego
Silniki prądu stałego z regulowaną prędkością obrotową na drodze elektronicznej. Najmniejsza prędkość obrotowa w przypadku silników prądu stałego wynosi 20 obr/min, a dla silników indukcyjnych z zastosowaniem falowników praktycznie może być bliska zeru.
Elektrowrzeciono, to silnik indukcyjny, układ sterowania, chłodzenia i specjalne, bardzo dokładne łożyskowanie, więc koszt elektrowrzeciona jest bardzo wysoki.
Silniki liniowe służą do bezpośredniego otrzymywania ruchu liniowego
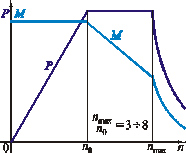
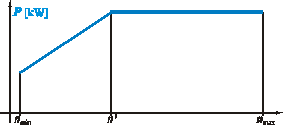
Charakterystyka napędu głównego obrabiarki to wykres mocy lub momentu obrotowego w funkcji prędkości (np. obrotowej)
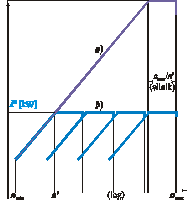
Sposoby przystosowania charakterystyki mechanicznej napędu głównego do charakterystyki silnika:
a) przez dobór znacznie większego silnika oraz
b) przez zastosowanie kilkubiegowego reduktora
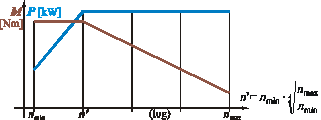
Ewolucja charakterystyk napędów głównych obrabiarek
silniki prądu stałego z regulowaną prędkością obsowaniem falowników praktycznie może być bliska zeru.
„konwencjonalne”: 100 4000 [obr/min]
„z elektrowrzecionem”: 1000 20 000
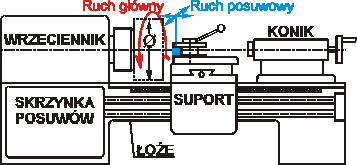
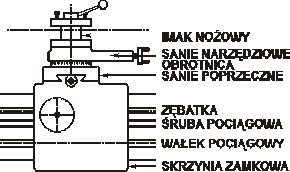
Tokarki to najpopularniejsze uniwersalne obrabiarki. Ruch główny wykonuje przedmiot zamocowany na wrzecionie, a ruch posuwowy - narzędzie osadzone w imaku na suporcie.
Automat, to obrabiarka pracująca w cyklu automatycznym, czyli całkowicie bez obsługi człowieka. Półautomat, to maszyna, w której podawanie materiału, lub półfabrykatów odbywa się ręcznie. Centrum obróbkowe jest obrabiarką o sterowaniu numerycznym z automatyczną wymianą narzędzi.
Frezarki, to bardzo popularna i różnorodna grupa obrabiarek. Ruch główny wykonuje narzędzie osadzone we wrzecionie, a ruch posuwowy - przedmiot obrabiany umieszczony na stole frezarki.
Napęd główny i posuwowy we frezarkach są niezależne, zatem jest tu nastawiana prędkość posuwu w [mm/min].
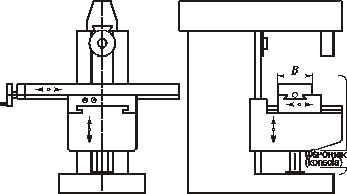
Posuw roboczy może być włączany alternatywnie na każdą z trzech osi: X, Y i Z, natomiast przesuwy szybkie (nastawcze) mogą być włączane jednocześnie na parę osi.
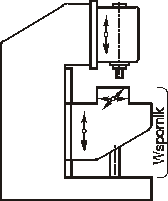
Stół krzyżowy wraz z zespołem posuwowym nazywa się wspornikiem.
Frezarki wspornikowe mają zazwyczaj dwa wrzeciona: poziome, łożyskowane w korpusie głównym i niezależne pionowe (skrętne) z napędem w belce.
Głowica skrętna frezarki wspornikowej (napęd w belce) Wrzeciennik z własnym napę. na belce frez
Frezarka wspornikowa pozioma: Frezarki bezwspornikowe:
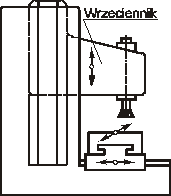
Frezarki bezwspornikowe mają sztywniejszą budowę od wspornikowych, ale zakres zabiegów jest ograniczony - jest mniejsza możliwość względnego ustawiania przedmiotu i wrzeciona.

Szlifowanie jest usuwaniem naddatku materiału za pomocą ściernicy, mającej ziarna ścierne połączone spoiwem. Schemat budowy ściernicy:
Charakterystyka szlifowania:
- nieokreślona geometria ostrzy ziaren ściernych,
- samoostrzenie ściernicy przez wykruszanie stępionych ziaren, na skutek zwiększonych sił skrawania,
- ostrzenie ściernicy przez „obciąganie” (tj. wykruszanie ziaren obciągaczem - jest to kryształ diamentu wlutowany w oprawę lub krążki karborundowe,
- stosunkowo małe siły obwodowe skrawania przy dużych odporowych,
- względnie duża moc skrawania - silne wydzielanie się ciepła - wymagane obfite chłodzenie,
- wymagane są duże prędkości skrawania: od 25 ÷ 35 m/s dla spoiw ceramicznych, do 50 ÷ 80 m/s dla spoiw elastycznych (bakelit, guma, szelak, to spoiwa stosowane najwcześniej).
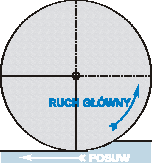
KINEMATYKA SZLIFOWANIA:
szlifowanie walkow (KŁOWE) I szlifowanie plaszczyzn Obwodem scienicy, czolem scirnicy

Widok ogólny: obwodowej czołowej szlifierki do płaszczyzn:
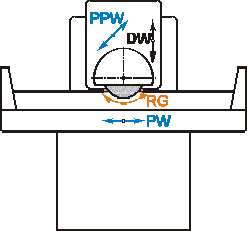
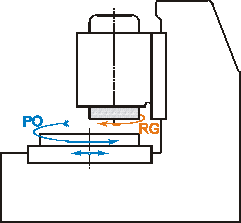
RG - ruch główny, PO - ruch posuwowy,
PW - posuw wzdłużny, PPW - posuw poprzeczny wrzeciennika
Koło zębate - element czynny przekładni zębatej oraz element innych mechanizmów
Zarysem ewolwentowym - nazywa się krzywą, która zakreśla ustalony punkt prostej, toczącej się bez poślizgu po okręgu koła. Przy współpracy zębów o zarysie ewolwentowym linia przyporu jest linią prostą. Jest to podstawowa cecha tego zazębienia.
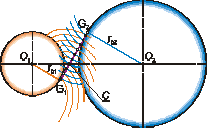
Iloraz długości odcinka przyporu i podziałki zasadniczej jest wskaźnikiem zaząbienia, większym od W poniższym przykładzie: ε = 1,611.
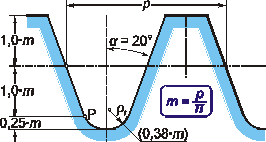
Moduł - jednostka miary zarysu - jest ilorazem podziałki i liczby π.
Metody obróbki uzębień kół walcowych:

Metoda kształtowa - komplet frezów kształtowych zawiera 26, 15 lub 8 frezów. Mały komplet (8 frezów) istnieje tylko do modułów m ≤ 7 mm. Dobór frezów jest zależny od liczby zębów; dla zębów śrubowych zzast = z / cos3 β.

Frez kształtowy palcowy
i schemat uzębienia
o linii daszkowej
RG - ruch główny, PO - posuw, PD - podział dyskretny
Metody obwiedniowe - kształtowanie narzędziem zębatkowym zębów kół walcowych
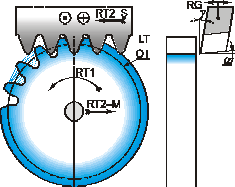
Zasada kształtowania uzębień narzędziem zębatkowym:
LT - linia toczna,
OT - okrąg toczny,
RG - ruch główny (liniowy),
RT1 - pierwsza składowa ruchu odtaczania (obrót koła),
RT2 - druga składowa ruchu odtaczania: - M - wg Maaga,
- S - wg Sunderlanda.
Podział odbywa się po każdym obrobieniu zęba
(jednej podziałki)
Wyszukiwarka
Podobne podstrony:
Pytania egz.MIUT stacjon.I st s.6 2014-15, Politechnika Poznańska (PP), Inne, MUT, new folder, Maszy
MiUT test ćw 5 Bembenek, WIMiR AGH, Semestr VI, Maszyny i Urządzenia Technologiczne (MiUT), Kolokwia
Pomiary błędów położenia , kierunkowości zespołów maszyn i urządzeń technologicznych wykres 2
Pomiary błędów położenia , kierunkowości zespołów maszyn i urządzeń technologicznych sprawko 5
Pomiary błędów położenia , kierunkowości zespołów maszyn i urządzeń technologicznych sprawko 7
Kruszarki, IMIR, I stopień, 6 semestr, Maszyny i urządzenia technologiczne, Od Kuby
Maszyny i Urządzenia Technologiczne txI-2, Materiały pomocnicze studenta, Wykłady, Maszyny i Urządze
Pomoce Napędy, Studia, ZiIP, SEMESTR VI, Napędy maszyn i urządzeń technologicznych (NMiUT)
Maszyny do klasyfikacji ziarnowej materia, IMIR, I stopień, 6 semestr, Maszyny i urządzenia technolo
sprawozdanie2, Zarządzanie i inżynieria produkcji, Semestr 7, Maszyny i urządzenia technologiczne
9, IMiR, Maszyny i Urzadzenia Technologiczne
Pomiary błędów położenia , kierunkowości zespołów maszyn i urządzeń technologicznych sprawko 2
Pomiary błędów położenia , kierunkowości zespołów maszyn i urządzeń technologicznych sprawko 6
Pomiary błędów położenia , kierunkowości zespołów maszyn i urządzeń technologicznych sprawko 4
Pomiary błędów położenia , kierunkowości zespołów maszyn i urządzeń technologicznych wykres 1
Pomiary błędów położenia , kierunkowości zespołów maszyn i urządzeń technologicznych sprawko 1
sprawozdanie belka DMIUM+teoria, Studia, Studia sem VI, Dynamika maszyn i urzadzen mechatr, DMIUM by
więcej podobnych podstron