Teoria
Kompensacja dewiacji B, oraz C, metodą AIRY.
…
…
…
Do uzupełnienia
Przebieg doświadczenia :
Ustawiono dewiaskop w linii południka magnetycznego (KM=KK=000, patrz rys.1)
rys. 1
Wybrano dowolny magnes ze stali twardej oraz ustalono jego bieguny.
Wybrany magnes umieszczono na dewiaskopie (patrz rys.2), co pozwoliło na zasymulowanie namagnesowania stali twardej w kadłubie statku. Specjalnie nie obliczano jednak, ani nie sprawdzano właściwości magnesu, aby stworzyć sytuację podobną do rzeczywistej.
rys. 2
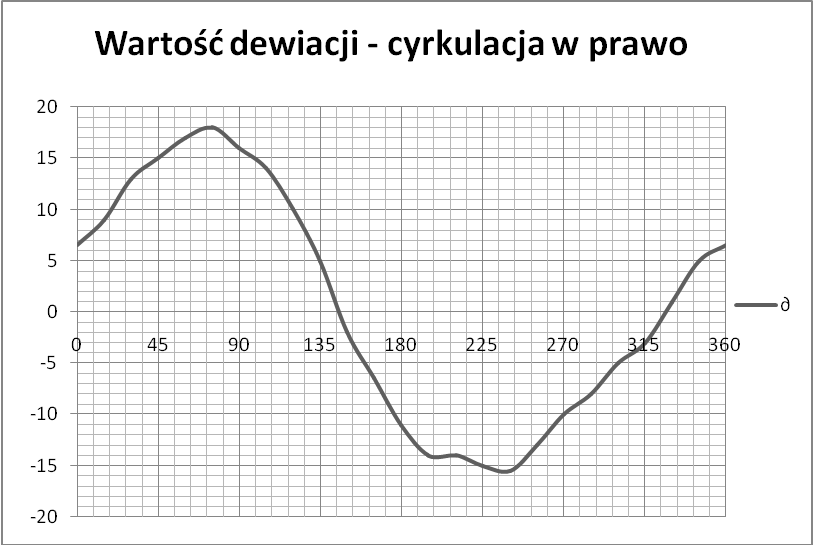
Przeprowadzono badanie dewiacji statku poprzez wykonanie cyrkulacji w prawo, w czasie której odczytywano kursy kompasowe co 15 stopni dla każdego kursu magnetycznego. Efektem czego uzyskano wyniki przedstawione w Tabeli 1. Wykonano wykres dewiacji(Wykres 1), na którym zaobserwowano, że dewiacja znacznie przekracza dopuszczalne normy, oraz maksymalne jej wartości występują na kursach 075, oraz 240 stopni.
Tabela 1
KM |
KK |
|
0 |
353,5 |
6,5 |
15 |
6 |
9 |
30 |
17 |
13 |
45 |
30 |
15 |
60 |
43 |
17 |
75 |
57 |
18 |
90 |
74 |
16 |
105 |
91 |
14 |
120 |
110 |
10 |
135 |
130 |
5 |
150 |
152 |
-2 |
165 |
171,5 |
-6,5 |
180 |
191 |
-11 |
195 |
209 |
-14 |
210 |
224 |
-14 |
225 |
240 |
-15 |
240 |
255,5 |
-15,5 |
255 |
268 |
-13 |
270 |
280 |
-10 |
285 |
293 |
-8 |
300 |
305 |
-5 |
315 |
318 |
-3 |
330 |
329 |
1 |
345 |
340 |
5 |
360 |
353,5 |
6,5 |
W celu dokładniejszego zbadania charakterystyki dewiacji obliczono również współczynniki dewiacji korzystając ze wzorów stosowanych przy metodzie kompensacji Airy:
Współczynniki dewiacji |
|
|
|
|
||
|
|
|
|
|
|
|
A |
(δN+δNE+δE+δSE+δS+δSW+δW+δNW)/8= |
0,4 |
||||
B |
(δE-δW)/2= |
|
|
|
13 |
|
C |
(δN-δS)/2= |
|
|
|
8,8 |
|
D |
((δNE+δSW) - (δSE + δNW))/4= |
|
-0,5 |
|||
E |
((δN+δS) - (δE + δW))/4= |
|
|
-2,6 |
||
Obliczone współczynniki jasno informują nas, że na symulowanym „statku” istnieje tylko dewiacja typu B i C. Jest to oczywiste, ponieważ w rozważanej sytuacji symulujemy pole magnetyczne wywołane przez stal twardą, namagnesowaną w czasie budowy okrętu.
Po obliczeniu współczynników B, oraz C, obliczono również siły działania pola magnetycznego stali okrętowej P, oraz Q. Wynoszą one odpowiednio(współczynnik Lambda przyjęto 0,01) :
P1 |
(B1 * Hm)/57,3= |
|
|
|
39,70332 |
Q1 |
(C1 * Hm)/57,3= |
|
|
|
26,72339 |
Znajomość wartości działania sił magnetyzmu okrętowego pozwala na ustalenie jak powinny być rozmieszczone magnesy kompensujące, oraz jaka jest wypadkowa siła zakłócająca działanie kompasu, oraz powodująca dewiację. Siła ta jest skierowana w kierunku ok. 56 stopni względem dziobu statku, co tłumaczy powstawanie największej dewiacji na kursach ok. 75 i 240 stopni.
Zadecydowano zatem umieścić dwa magnesy kompensacyjne (aby zniwelować działanie sił P, oraz Q). Magnes poprzeczny, kompensujący siłę Q, oraz magnes wzdłużny, kompensujący siłę P. Strojenie sił kompensujących polega na odpowiednim oddalaniu lub zbliżaniu magnesów kompensujących od kompasu.
Po analizie charakterystyki magnetycznej kadłuba ustalono miejsca, w których powinny być zamocowane magnesy kompensacyjne, oraz jak powinny być zorientowane ich bieguny (patrz rys.3).
rys. 3
Po umieszczeniu magnesów przeprowadzono kompensacje dewiacji poprzez niwelację odchyłki kompasu na kursach, na których występowała ona maksymalnie:
Najpierw zamocowano magnes kompensacyjny wzdłużny, obok kompasu magnetycznego, biegunem czerwonym do dziobu. Regulując oddalenie magnesu od kompasu zniwelowano dewiację na kursie E, a następnie zmieniono kurs na W i zgodnie z sugestią prowadzącego zniwelowano powstałą dewiację do połowy, mimo, że nie przekraczała ona 2 stopni.(patrz rys.4).
rys. 4
Zamocowano magnes poprzeczny, przed kompasem, skierowany biegunem czerwonym na prawą burtę. Magnes ten kompensuje siłę składową Q. Niwelację dewiacji przeprowadzono na kursach N, oraz S(patrz rys.5).
rys. 5
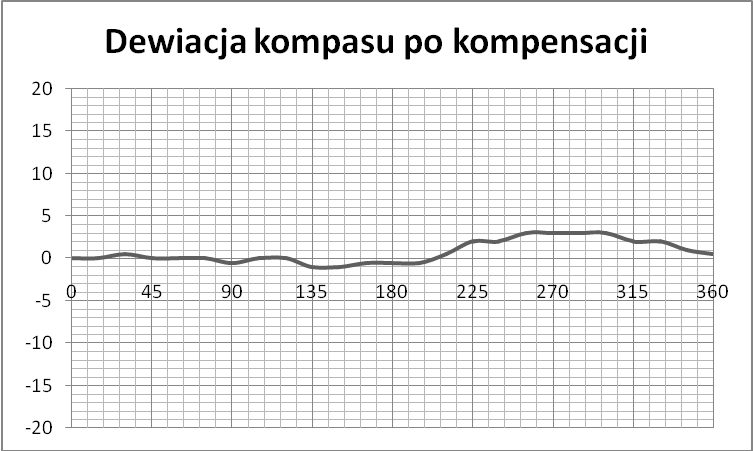
Po kompensacji przeprowadzono ponownie cyrkulację w prawo uzyskując wyniki przedstawione w tabeli 2, oraz sporządzono wykres dewiacji.
Tabela 2
KM |
KK |
∂ |
0 |
0 |
0 |
15 |
15 |
0 |
30 |
29,5 |
|
45 |
45 |
0 |
60 |
60 |
0 |
75 |
75 |
0 |
90 |
90,5 |
-0,5 |
105 |
105 |
0 |
120 |
120 |
0 |
135 |
136 |
-1 |
150 |
151 |
-1 |
165 |
165,5 |
-0,5 |
180 |
180,5 |
-0,5 |
195 |
195,5 |
-0,5 |
210 |
209,5 |
0,5 |
225 |
223 |
2 |
240 |
238 |
2 |
255 |
252 |
3 |
270 |
267 |
3 |
285 |
282 |
3 |
300 |
297 |
3 |
315 |
313 |
2 |
330 |
328 |
2 |
345 |
344 |
1 |
360 |
359,5 |
0,5 |
Aby przekonać się czy kompensacja faktycznie wpłynęła na współczynniki B, oraz C, ponownie przeprowadzono obliczenia:
A |
(δN+δNE+δE+δSE+δS+δSW+δW+δNW)/8= |
0,625 |
|||
B |
(δE-δW)/2= |
|
|
|
-1,75 |
C |
(δN-δS)/2= |
|
|
|
0,25 |
D |
((δNE+δSW) - (δSE + δNW))/4= |
|
0,25 |
||
E |
((δN+δS) - (δE + δW))/4= |
|
|
-0,75 |
|
Jak widać, po kompensacji udało się uzyskać znacznie mniejsze wartości współczynników B, oraz C, a faktyczne wartości dewiacji średniej nie przekraczają dopuszczalnych norm (np. wymagań stawianych przez władze Panamskie)
Zaobserwowano, że dewiacja nie przekracza 5 stopni, na żadnym kursie. Opracowano tabelę dewiacji, z której może korzystać oficer wachtowy(patrz rys.6), oraz wykres, ukazujący łagodny przebieg krzywej dewiacji(patrz. Wykres 3). Oba elementy opracowano za pomocą programu CSwing(30 days Trial Ver.).
rys. 6
Wykres 3
Wnioski
…
…
…
Do uzupełnienia
Ada Adamkiewicz Laboratorium Dewiacji
Robert Bursiewicz 05.11.2009
str. 1
Wykres 1
Wykres 2
Wyszukiwarka