POLITECHNIKA POZNAŃSKA INSTYTUT AUTOMATYKI I INŻYNIERII INFORMATYCZNEJ Zakład Automatyki i Robotyki Laboratorium podstaw automatyki |
||||
|
Ćwiczenie nr 2 Temat: Charakterystyki częstotliwościowe układów liniowych. |
|||
Rok akad. 2007/2008 |
Paulina Jankowiak
|
Wykonanie ćwiczenia
13.10.2008r. |
Oddanie sprawozdania
19.10.2008r. |
|
Wydział Elektryczny |
|
|
|
|
Studia stacjonarne |
|
|
|
|
Elektrotechnika |
|
|
|
|
|
|
Ocena: |
||
Grupa E3 |
|
|
||
UWAGI: |
||||
1. Cel ćwiczenia
Ćwiczenie ma na celu zapoznanie się z charakterystykami częstotliwościowymi podstawowych
elementów automatyki, takimi jak: charakterystyka amplitudowo-fazowa, logarytmiczna
charakterystyka modułu oraz logarytmiczna charakterystyka fazowa, z jednoczesną analizą
wpływu poszczególnych parametrów na ich kształt.
2. Podstawowe wiadomości
Zawarte w skrypcie
3. Przebieg ćwiczenia
3.1 Wpływ wartości parametrów na charakterystyki częstotliwościowe.
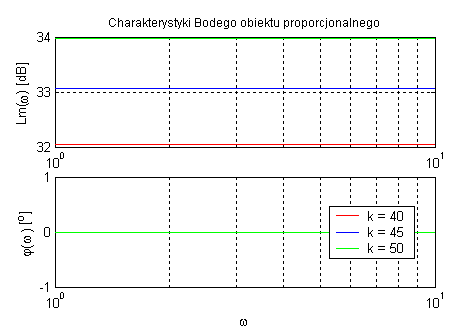
Obiekt proporcjonalny (zmienne k).
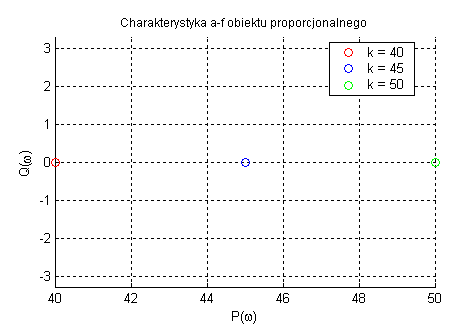
Obiekt proporcjonalny ma jedynie wzmocnić amplitudę sygnału, bez zmiany jego fazy. Z tego powodu wzrost parametru k ma wpływ tylko na podniesienie charakterystyki amplitudowej lub przesunięcie w prawo punktu dla charakterystyki amplitudowo-fazowej.
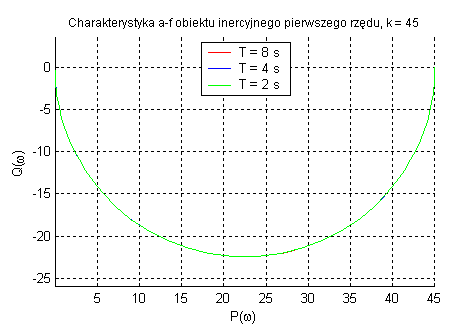
Obiekt inercyjny pierwszego rzędu
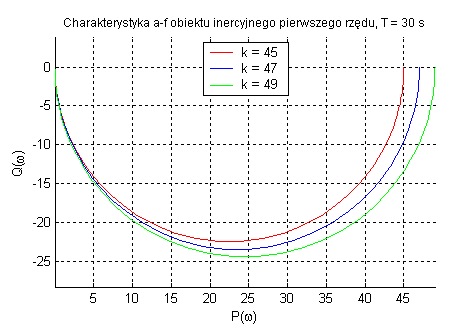
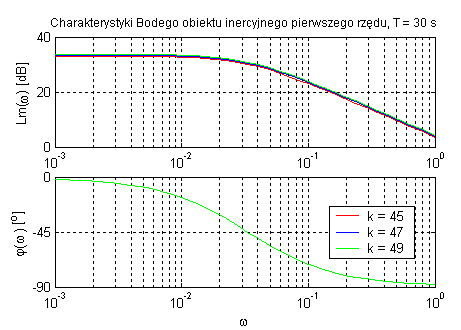
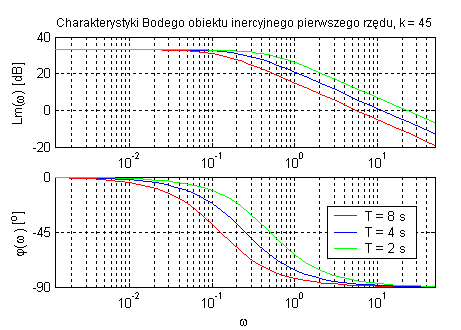
Element inercyjny wprowadza zmiany zarówno w module jak i fazie sygnału. Parametr k decyduje o amplitudzie ale nie ma wpływu na na zmianę fazy. Charakterystycznym punktem jest ω=1/T, dla którego przesunięcie fazowe jest równe -45˚. Stała czasowa T ma wpływ na szerokość pasma przenoszenia obiektu. Pasmo przenoszenia zmniejsza się wraz ze wzrostem T.
Obiekt dwuinercyjny (zmienne k oraz T1).
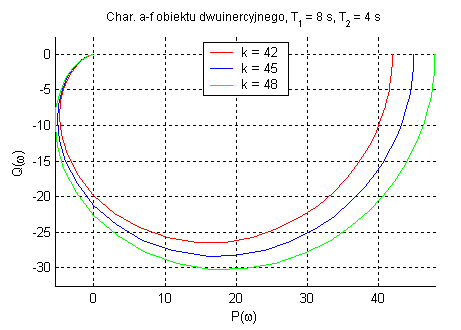
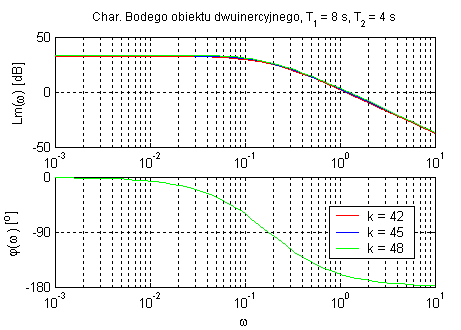
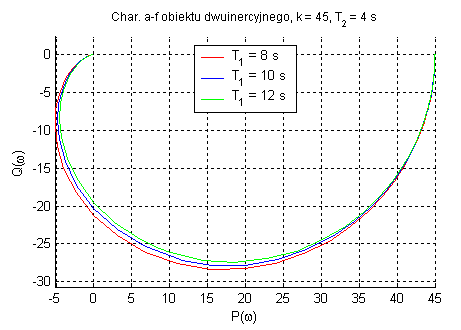
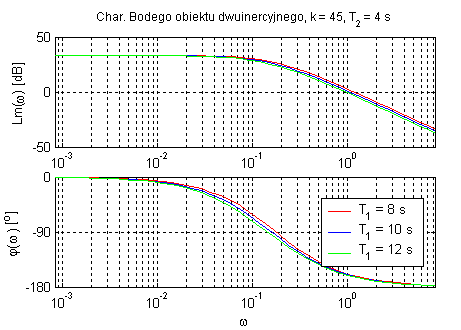
Dodatkowy człon inercyjny zwiększa opóźnienie układu(do 180°). Podobnie jak w obiekcie
inercyjnym pierwszego rzędu parametr k wpływa tylko na amplitudę. T1 okresla dla jakiej częstotliwości następuje tłumienie sygnału. Charakterystyka Nyquista obejmuje dwie ćwiartki układu zmiennej zespolonej.
Obiekt inercyjny n-tego rzędu (zmienne k, T oraz n).
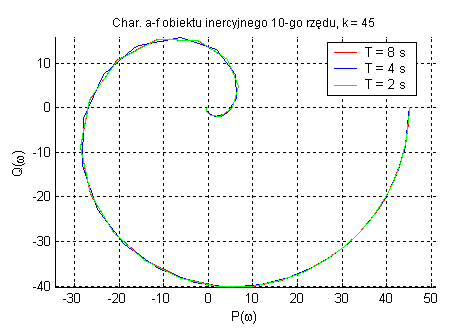
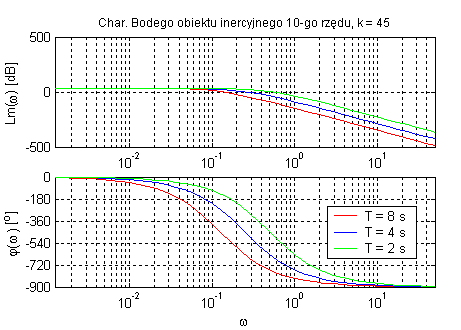
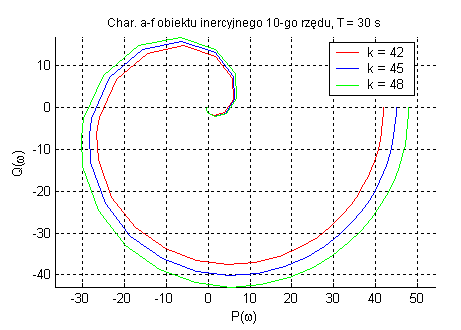
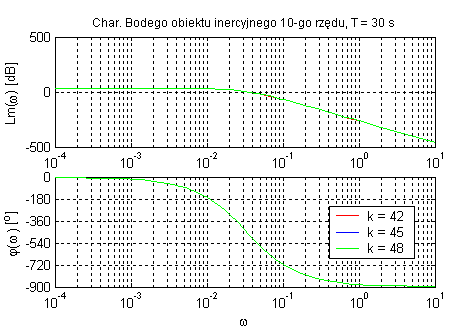
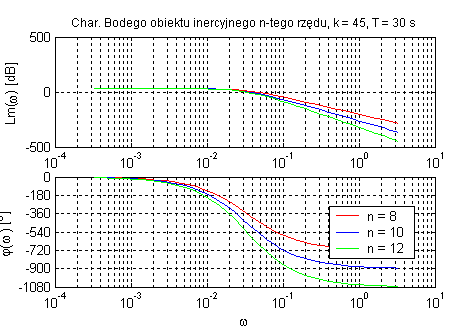
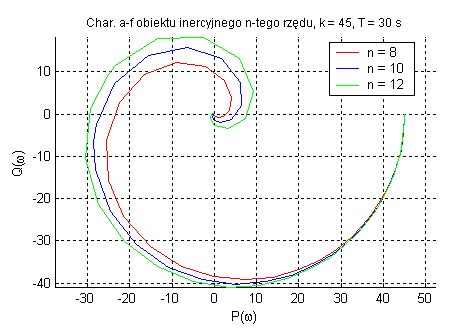
Zwiększenie rzędu inercji zwiększa podatność zmiany fazy i modułu ze względu na zmianę pulsacji. Opóźnienie fazowe wynosi n•90˚. Parametr k wpływa tylko na amplitudę oraz T określa ωg , a rząd inercji obiektu decyduje o nachyleniu charakterystyki fazowej.
Obiekt oscylacyjny (przy k=1, zmienne ωn oraz ξ).
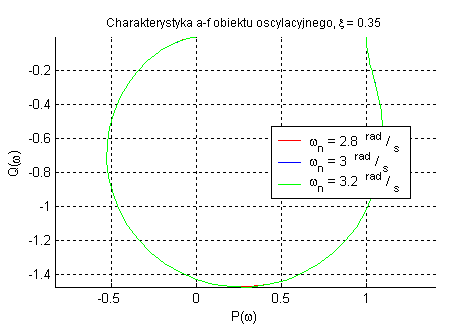
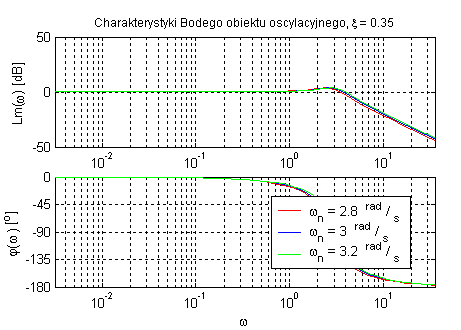
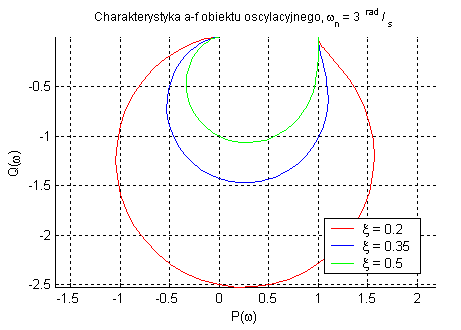
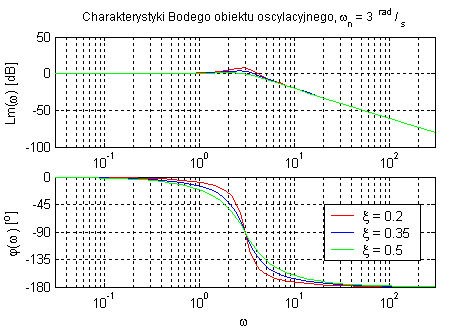
Obiekt ten ma tendencję do oscylacji w zależności od parametru tłumienia ξ. Parametr ωn decyduje o pulsacji, w której następuje tłumienie sygnału, zwiększenie przesunięcia fazowego oraz zakrzywianie charakterystyk.
Obiekt całkujący idealny (zmienne k).
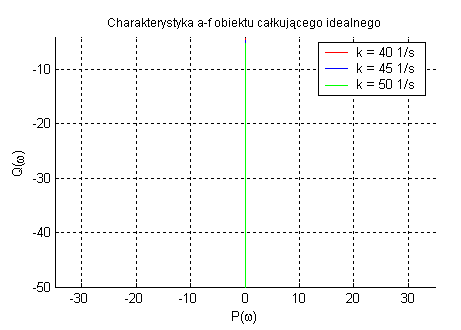
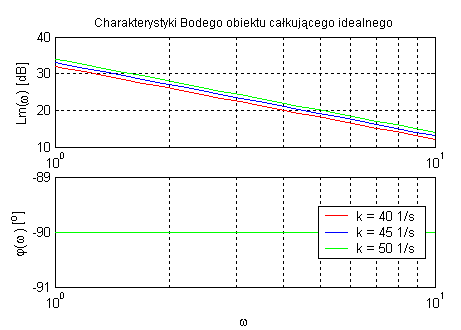
Element całkujący idealny zmniejsza amplitudę sygnału proporcjonalnie do pulsacji oraz przesuwa fazę sygnału o -90˚.
Obiekt całkujący z inercją (zmienne k oraz T).
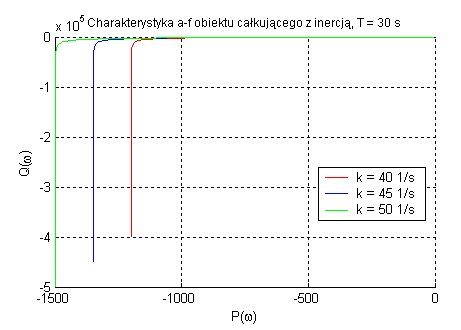
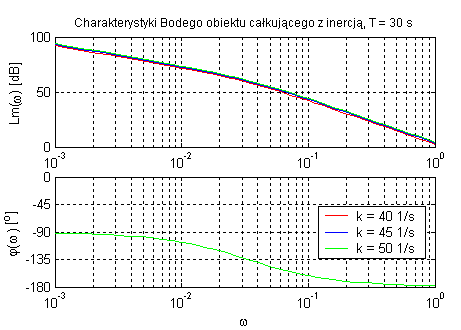
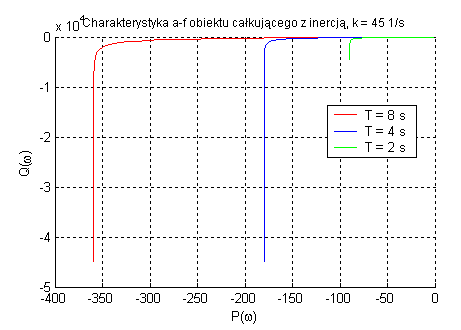
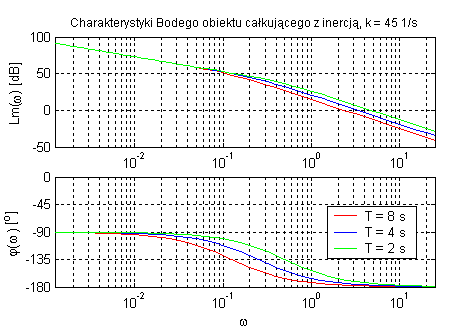
Obiekt całkujący rzeczywisty oraz obiekt całkujący idealny różnią się tym że ten pierwszy uwzględnia jego bezwładność. Moment przegięcia charakterystyk zależy od parametru T, a dodanie inercji powoduje zwiększenie się opóźnienia fazowego (do 180˚). Regulacja wzmocnienia obiektu wpływa na wartość amplitudy.
Obiekt różniczkujący rzeczywisty (zmienne k oraz T).
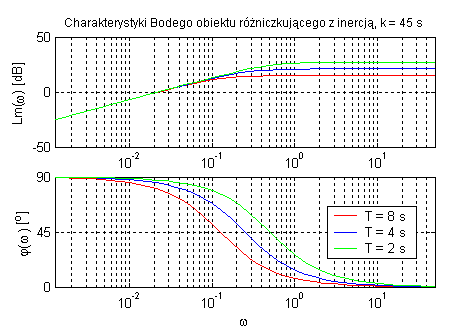
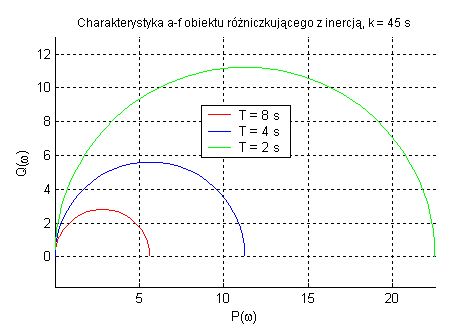
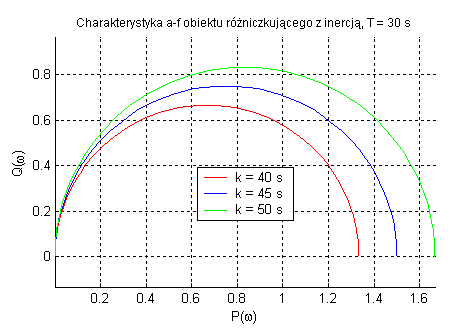
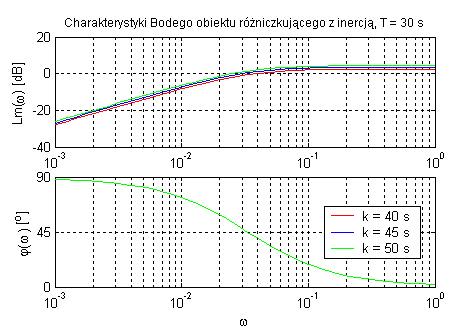
W obiekcie różniczkującym sygnał wyjściowy zależy od szybkości zmian sygnału wejściowego. Parametr k powoduje zmianę amplitudy ale nie ma wpływu na przesunięcie fazowe. Natomiast T określa pulsację.
Obiekt inercyjny pierwszego rzędu z opóźnieniem transportowym (zmienne k, T oraz T0).
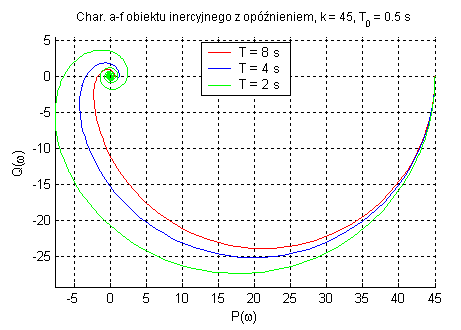
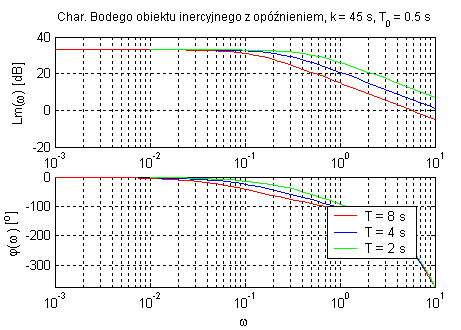
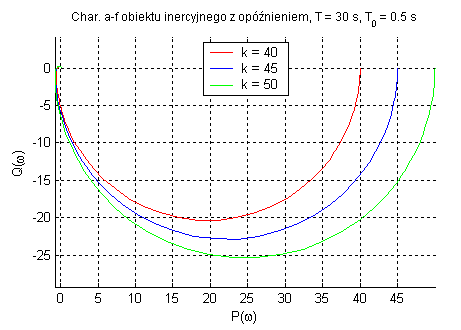
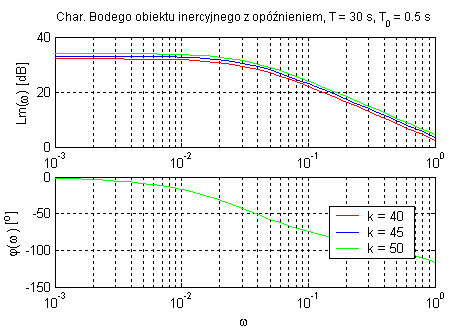
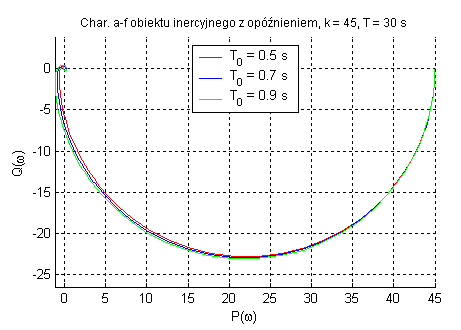
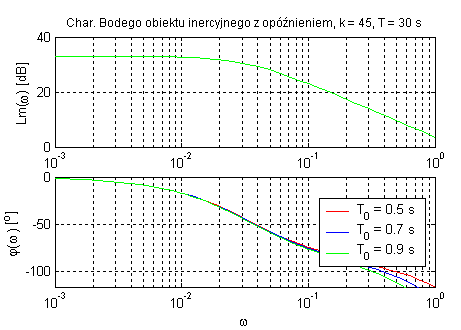
Zadaniem elementu opóźniającego jest opóźnienie sygnału w czasie. Parametr k wpływa tylko na amplitudę sygnału, a T określa punkt przegięcia charakterystyk.
3.2. Analityczne wyznaczenie odpowiedzi czasowej.
Wyznaczyć odpowiedź na wymuszenie harmoniczne u(t)=1.0sin(55.0t) obiektu różniczkującego rzeczywistego o transmitancji podanej poniżej i parametrach k=45.0 T=30.0s.
Ponieważ
dlatego
a
więc
( e zostało zapisane w ten sposób z powodu problemów z zapisaniem „-” w potędze.
3.3. Analityczne wyznaczenie wykresów Bodego.
Poniżej przedstawiono charakterystyki Bodego zadanego obiektu.
6
Wyszukiwarka