Politechnika Śląska
Wydział: Mechaniczny Technologiczny
Kierunek: Automatyka i Robotyka
Semestr: IV
PODSTAWY KONSTRUKCJI MASZYN
Projekt typoszeregu chwytaków
Grupa 2
Paweł Sowiński
Wstęp
Podstawowymi zespołami funkcjonalnymi chwytaka są: układ napędowy, układ przeniesienia napędu i układ wykonawczy. W układzie napędowym zostaje wytworzona siła która jest przekazywana na końcówki chwytne. Układ wykonawczy może być wyposażony
w sztywne, elastyczne lub sprężyste końcówki.
Chwytaki w procesie manipulacji realizują trzy podstawowe zadania
Pobranie obiektu z położenia początkowego
Trzymanie obiektu w czasie trwania jego przemieszczania
Uwolnienie obiektu w miejscu docelowym
Podział chwytaków ze względu na:
sposób trzymania obiektu
Siłowe
Kształtowe
Siłowo -kształtowe
Rodzaj napędu
Mechaniczny
Pneumatyczny
Hydrauliczny
Elektromagnetyczny
Adhezyjny
Najczęściej spotykane sposoby przeniesienia napędu stosowane w chwytakach to:
Dźwigniowy
Jarzmowy
Klinowy
Zębaty
Ogromna różnorodność obiektów manipulacji sprawiła, że chwytaki są obecnie najbardziej zróżnicowanym konstrukcyjnie zespołem maszyny. Na prawidłowe uchwycenie obiektu ma wpływ wiele czynników takich jak:
właściwości manipulowanego obiektu
-masa
-położenie środka ciężkości
-moment bezwładności
-odporność na naprężenia zewnętrzne
-kształt i parametry geometryczne
właściwości chwytne chwytaka
błąd wzajemnego ustawienia obiektu i chwytaka
Przykładowe chwytaki:
a).dwupalcowy b.przyssawkowy c.trójpalcowy
Założenia:
Opis istoty działania
Opracować konstrukcję układu chwytaka realizującego 3 ruchy elementarne:
uchwycenie obiektu manipulacji w położeniu początkowym
trzymanie obiektu w trakcie trwania czynności manipulacyjnych
uwolnienie obiektu manipulacji w miejscu docelowym
Dane sytuacyjne
Dane ilościowe
Dane charakterystyczne
D=33-68[ mm]
h=15-40 [mm]
Promień manipulatora R=1300[ mm]
Prędkość kątowa ramienia ω=1[ m/s]
Tworzywo: miedź
Możliwe rozwiązania konstrukcyjne i optymalizacja:
K1 - maksymalna zwartość konstrukcji chwytaka
K2 - minimalna masa
K3 - minimalna liczba elementów
K4 - maksymalna liczba elementów dobieranych
K5 - prostota montażu
K6 - prostota montażu kiści robota
K7 - zapewnienie prostoliniowości ruchu końcówek chwytaka
K8 - stabilna charakterystyka statyczna, przemieszczeniowa i siłowa
K9 - stabilność lub wzrost siły przy wzroście średnicy przemieszczenia obiektu
K10 - koszt
-- |
K 1 |
K 2 |
K 3 |
K4 |
K 5 |
K 6 |
K 7 |
K 8 |
K 9 |
K 10 |
ΣΚi |
K 1 |
-- |
1 |
0.5 |
0.5 |
0.5 |
0.5 |
1 |
1 |
1 |
1 |
7 |
K 2 |
0 |
-- |
0.5 |
0.5 |
0.5 |
0.5 |
0 |
1 |
0 |
0 |
3 |
K 3 |
0.5 |
0.5 |
-- |
0.5 |
1 |
1 |
0.5 |
0 |
0.5 |
0 |
4.5 |
K 4 |
0.5 |
0.5 |
0.5 |
-- |
1 |
1 |
1 |
0 |
0.5 |
0.5 |
5.5 |
K 5 |
0.5 |
0.5 |
0 |
0 |
-- |
1 |
0.5 |
0.5 |
0.5 |
0.5 |
4 |
K 6 |
0.5 |
0.5 |
0 |
0 |
0 |
-- |
0.5 |
0 |
0 |
0.5 |
2 |
K 7 |
0 |
1 |
0.5 |
0 |
0.5 |
0.5 |
-- |
0 |
0 |
1 |
3.5 |
K 8 |
0 |
0 |
1 |
1 |
0.5 |
1 |
1 |
-- |
0.5 |
1 |
6 |
K 9 |
0 |
1 |
0.5 |
0.5 |
0.5 |
1 |
1 |
0.5 |
-- |
1 |
6 |
K10 |
0 |
1 |
1 |
0.5 |
0.5 |
0.5 |
0 |
0 |
0 |
-- |
3.5 |
|
w1 |
w2 |
w3 |
w4 |
w5 |
w6 |
w7 |
w8 |
w9 |
w10 |
w.id |
K1 |
1 |
3 |
2 |
1 |
1 |
3 |
2 |
1 |
3 |
3 |
3 |
K2 |
2 |
1 |
1 |
1 |
2 |
1 |
1 |
2 |
2 |
1 |
3 |
K3 |
3 |
2 |
3 |
2 |
2 |
2 |
1 |
2 |
2 |
2 |
3 |
K4 |
2 |
1 |
2 |
2 |
1 |
2 |
1 |
2 |
1 |
2 |
3 |
K5 |
2 |
3 |
3 |
2 |
1 |
1 |
1 |
3 |
1 |
1 |
3 |
K6 |
1 |
3 |
3 |
1 |
2 |
2 |
2 |
2 |
2 |
2 |
3 |
K7 |
2 |
2 |
3 |
3 |
2 |
2 |
2 |
1 |
2 |
1 |
3 |
K8 |
1 |
3 |
1 |
1 |
2 |
1 |
2 |
2 |
2 |
2 |
3 |
K9 |
2 |
2 |
3 |
3 |
2 |
1 |
2 |
1 |
1 |
3 |
3 |
K10 |
1 |
2 |
1 |
1 |
3 |
2 |
2 |
2 |
3 |
1 |
3 |
z |
76 |
100.5 |
97,5 |
78 |
77 |
78 |
73 |
77.5 |
85 |
89 |
135 |
d |
56% |
74% |
72% |
58% |
57% |
58% |
54% |
57% |
63% |
66% |
100% |
Obliczenia:
Skład chemiczny i gęstość specjalnych stopów miedzi do przeróbki plastycznej (wg PN-92/H-87060) |
|||||||
|
|
|
|
|
|
|
|
H[mm] |
D[mm] |
R[mm] |
w[rad/s] |
Tworzywo |
Objętość[cm^3] |
Masa [g] |
gęstość = 8,3 [g/cm^3] |
15 |
33 |
1300 |
1 |
BB2 |
12,83 |
106,48 |
|
22 |
41 |
1300 |
1 |
BB2 |
29,05 |
241,08 |
|
29 |
50 |
1300 |
1 |
BB2 |
56,94 |
472,61 |
|
35 |
59 |
1300 |
1 |
BB2 |
95,69 |
794,22 |
|
40 |
68 |
1300 |
1 |
BB2 |
145,27 |
1205,72 |
|
Mmax = 1205,72 [g] = 1,20572[kg]
Mmin = 106,48 [g] = 0,10648 [kg]
Siła uchwytu w ruchu pionowym
Przyjmuje współczynnik tarcia ![]()
oraz przyspieszenie ap = 1[m/s2]
Rys.1 Rozkład sił
T- siła tarcia
G - siła ciężkości
Fb- siła bezwładności
Do obliczeń przyjmuje Mmax
G=g *M = 9.81[m/s2] *1.20572[kg] = 11.83 [N]
Fb=a*M = 1[m/s2] *1.20572[kg] = 1.21 [N]
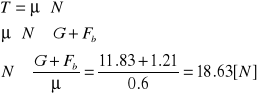
Zakładając współczynnik bezpieczeństwa n=2
Fch1![]()
N=18.63*2 = 37.26[N]
Siła uchwytu w ruchu obrotowym
Siła odśrodkowa
![]()
Siła bezwładności (przyjmuje przyspieszenie ao= 1 [m/s2]
![]()
Siła ciężkości
![]()
Siła wypadkowa
![]()
Współczynnik bezpieczeństwa n=2
![]()
*N=Fw

---------------------------------- |
Siła uchwytu |
Ruch pionowy |
37.26[N] |
Ruch obrotowy |
34.26[N] |
a=0.040[m]
b=0.030[m]
c=0.040[m]
d=0.020[m]
l=0.120 [m]
y=0.074 [m]
Dobrano siłownik pneumatyczny producenta FESTO model: ADVU-25-25-P-A
- Tłok ∅: 25[mm]
- Skok: 25 [mm]
- Zakończenie tłoczyska: M10
- Siła dla ciśnienia 6bar przy wysuwaniu/ cofaniu: 295/245 [N]
Dobór przekroju ramion:
Wyznaczenie siły Rb która spowoduje w punkcie „B” siłę Fch na końcu palca chwytnego - punkt „A”
D
B
Mg
Fch=0,5*37.26 [N] l=0.12 [m] c=0.04 [m]
ΣMD = -Rb·c+Fch·(l-c)=0 ⇒ Rb= 37.26 [N]
Maksymalny moment gnący wystąpi w punkcie D
Mgmax = 37.26[N]*0.04[m] = 1.4904 [Nm]
Obliczanie na podstawie Mgmax przekroju palca chwytnego w warunku wytrzymałości na zginanie.
Wyznaczanie przekroju palca nr. 2
C 
α
Mg
B
a=0.04[m]
Fb =Rb/sinα ⇒ Fb = 52.23 [N]
Mgmax = 52.23[N]*0.04[m] = 2.0895 [Nm]

F Rf
b
Fs E
C RC
b=0.030[m]
Rf =Rc =1/2Fs
Maksymalny moment gnący wystąpi w punkcie E, wyniesie on ¼*Fs*b ⇒
⇒ Mgmax = ¼*149.1[N]*0.030[m] = 1.118 [Nm]
Dobieram dla każdego ramienia przekrój 5x5 [mm]
Obliczanie wymiarów sworznia:
W celu zwiększenia bezpieczeństwa z normy dobieram sworzeń o średnicy większej, równej 3[mm]
Typoszereg dla pokrywy
Model |
Szerokość A |
Szerokość B |
Rozstaw Śrub |
Rozstaw śrub od krawędzi |
a |
b |
c |
A0 |
25 |
64 |
57 |
9 |
3 |
7 |
17 |
A1 |
33 |
72 |
63 |
16 |
6 |
13 |
28 |
A2 |
40 |
80 |
74 |
23 |
8 |
18 |
39 |
Podstawowy |
55 |
95 |
84 |
34 |
12 |
25 |
47 |
A3 |
64 |
105 |
93 |
40 |
15 |
31 |
56 |
A4 |
76 |
117 |
105 |
46 |
18 |
39 |
70 |
Wnioski:
Rozwiązanie zadania - zaprojektowania chwytaka mogącego przenosić obiekty o zróżnicowanej masie i wymiarach, najłatwiej było rozwiązać dzięki poznanemu na wykładzie PKM procesu projektowo-konstrukcyjnego. Zaczynając od formalizacji potrzeby, poprzez koncypowanie i utworzenie pola możliwych rozwiązań uzyskaliśmy 10 możliwych konstrukcji chwytaka, kolejny przeprowadzany etap procesu projektowo-konstrukcyjnego mianowicie optymalizacja wyłonił najlepszą ze względu na dobrane kryteria postać konstrukcyjną.
Następny krok procesu czyli konstruowanie okazał się najbardziej złożony, należało wykazać się wiedzą z wytrzymałości materiałów w celu zapewnienia odpowiedniej wytrzymałości na zginanie oraz ścinanie projektowanych elementów, wiedza z podstaw mechaniki pomogła przy wyznaczeniu siły potrzebnej do uchwycenia obiektu (uwzględniając różne czynniki zewnętrzne: siłę tarcia, bezwładności i odśrodkową) wymaganą siłę siłownika oraz jego skok wyznaczono z zależności trygonometrycznych
Ostatni krok czyli zapis konstrukcji okazał się najbardziej czasochłonny oraz interesujący, dzięki rysunkowi złożeniowemu który jest bardzo czytelną formą przedstawienia konstrukcji osoba która nie brała udziału w konstruowaniu w łatwy sposób może zrozumieć istotę działania, a rysunki wykonawcze pozwalają na odczyt wymiarów poszczególnych elementów oraz ich wytworzenie.
Rozwiązania konstrukcyjne powierzonego zadnia mogły być różnorakie, zależne zarówno od warunków w jakich ma pracować chwytak, dostępnych materiałów i środków a przede wszystkim od inwencji twórczej projektanta. Podczas projektowania zrozumiałem jak ważne jest minimalizacja masy elementów - powoduje to zmniejszenie potrzebnej energii a co za tym idzie zmniejszenie kosztów zarówno produkcji jak i użytkowania. Zrozumiałem również że, tworzenie typoszeregu środka technicznego jest bardzo istotne poprzez zmiany geometryczne oraz ewentualne drobne zmiany konstrukcyjne możemy w prosty sposób wykorzystując tą samą postać konstrukcyjną zapewnić (na przykładzie chwytaka) manipulacje obiektów niewielkich po bardzo duże o znaczącej masie przez co stajemy się bardziej konkurencyjni na rynku.
Dzięki poznaniu podstaw projektowania, uważam że projektowanie ze wspomaganiu komputerowym stanie się teraz dla mnie bardziej zrozumiałe a co za tym idzie - łatwiejsze.
Literatura:
G.Kost „Podstawy robotyki i budowy robotów”
R.Zdanowicz „Robotyzacja procesów wytwarzania”
Dobrzański Tadeusz „Rysunek techniczny maszynowy”
A.Rutkowski „Części maszyn”
Normy: M-83001, M-82001, M-82302,M-82153
www.robotyka.com
www.geomatic.com.pl
www.festo.com
www.gimatic.com
h
D
ap
G
Fods
Fb
Fw
α
b
y
a
l
c
d
F
Fsy
Fsx
Fs
F
Fch
Fch
Fch
A
Rb
l-c
c
a
Fb
Rb
Wyszukiwarka