Podstawowe parametry geometryczne kół o zębach prostych.
z - liczba zębów,
![]()
- podziałka nominalna - odległość pomiędzy dwoma sąsiednimi zębami (bokami) mierzona na łuku koła podziałowego.
![]()
moduł (znormalizowany)
α - nominalny kąt przyporu na śr podziałowej
![]()
- średnica podziałowa,
![]()
- średnica wierzchołkowa,
![]()
- średnica stóp, podstaw,
b - szerokość wieńca zębatego
s - grubość zęba
Wg. PN:
ha = m - wysokość głowy zęba (od wierzchołku do śr podziałowej)
hf = 1,25m - wysokość stopy zęba
h =2,25m - wysokość zęba (h=ha+hf)
![]()
Podziałka zasadnicza

Dobór przełożenia całkowitego i na poszczególne stopnie.
Aby dobrać przełożenie pierwszego stopnia należy z wykresów wyznaczyć przedziały u1 a następnie tworzymy wykres zbiorczy i wybieramy optymalne u1
Mamy 4 kryteria:
Ze względu na objętość
Ze względu na długość
Ze względu na średnicę
Ze względu na moment bezwładności
Liczby zębów współpracujących kół powinny być liczbami pierwszymi tzn. nie miały wspólnych dzielników. Przy doborze można kierować się kilkoma wytycznymi:
Całkowity koszt produkcji przekładni powinien być możliwie mały
Całkowita masa przekładni, a zwłaszcza elementów wirujących powinna być możliwie mała
Całkowity moment bezwładności elementów wirujących powinien być jak najmniejszy
Duże koła poszczególnych stopni powinny mieć w przybliżeniu równe średnice aby jednakowo zanurzały się w oleju
Całkowita długość przekładni lub długość zajęta przez elementy wirujące powinna być mała.
Dobór liczby zębów zębnika z1.
Należy dobrać taką liczbę zębów zębnika z1, aby wartość doskokowego wskaźnika przyporu εβ była bliska 1 oraz w przypadku kół o zębach skośnych kąt pochylenia linii zęba β mieścił się w optymalnych graniach, tj 8 ÷ 15 °
Dobór liczby zębów koła z2
Korzystnie jest tak dobrać liczbę z2 aby była bliska iloczynowi z1 i u1 i była przy tym liczbą pierwszą względem z1 tj. aby liczby z1 oraz z2 nie miały wspólnych podzielników. w ten sposób ustala się ostatecznie wartość przełożenia danego stopnia u = z2/z1
Dobór kąta pochylenia linii zęba.
Kąty pochylenia linii zęba mierzony na kole podziałowym dobiera się dla kół o zębach śrubowych w granicach 8 - 15 ° Korzystne jest tak dobrać kąt pochylenia linii zęba aby poskokowy wskaźnik zazębienia był równy 1.
![]()
Ze wzrostem kąta pochylenia linii zęba rośnie wartość siły osiowej, a tym samym rośnie dodatkowe obciążenie łożysk, stąd należy tak dobierać parametry z powyższego równania aby kąt pochylenia linii był możliwie mały.
Korekcja zęba.
Korekcja dodatnia x>0
(jest ograniczona zaostrzeniem zęba, grubość zęba na kole wierzchołkowym nie może nie może być mniejsza niż 0,4 m, ze względu na luz). Dodatnie odsunięcie narzędzia w zazębieniu zewnętrznym w kierunku promieniowym o wielkość +xm umożliwia: (nie wiem czy nie napisac po prostu „Korekcja dodatnia umozliwia:”?)
-wykonanie koła o małej liczbie zębów bez podcinania stopy zęba,
-uzyskanie dowolnej odległości osi kół przy zachowaniu znormalizowanych modułów i całkowitej liczby zębów,
-poprawienie wytrzymałości zazębienia na złamanie i na naciski (uniknięcie pracy zarysów w pobliżu koła zasadniczego, gdzie ewolwenta ma mały promień krzywizny, a więc naciski są duże).
Wpływ przesunięcia jest tym mniejszy im większa jest liczba zębów.
Korekcja ujemna:
-pogarsza warunki pracy,
-używana jest tylko dla uzyskania potrzebnej odległości osi w kołach o dużej liczbie zębów.
Rodzaje korekcji zazębienia.
Przekładnie:
- bez przesunięcia (zazębienie niekorygowane) x1 = x2 =0
- o równej sumie przesunięć (P-0) x1 = -x2 lub x1+x2=0 (zalety: Taka sama odległość osi, Ten sam kąt zarysu, Uniknięcie podcinania zarysu, Zawsze dla dużego koła występuje ujemne przesunięcie zarysu, które ma mały wpływ na jego kształt, a dla koła o mniejszej ilości zębów przesunięcie dodatnie)
- przekładnia o dodatniej lub ujemnej sumie przesunięć (P) x1+x2≠0 (wymaga zmiany odległości kół,)
Nominalna wartość obciążenia jednostkowego Q.
Obciążenie jednostkowe Q, Qu:
Jako miarę obciążenia badanych kół zębatych przyjęto nominalny wskaźnik jednostkowy Q , który określa stosunek przenoszonego momentu do powierzchni tocznej koła zdefiniowany zależnością:

raczej 1 i 2 cześć tego wzoru..
M1 - moment statyczny, którym obciążono przekładnię badaną
bw - szerokość wieńca zębatego, dt - średnica toczna koła 1
W obliczeniach nacisków międzyrębnych występuje ona łącznie z funkcją przełożenia w postaci:
![]()
Dopuszczalne wartości Qu zależą głównie od:
- własności mechanicznych materiałów (![]()
)
- geometrii zazębienia (![]()
)
- warunków ruchowych (![]()
)
Warunki poprawności geometrii zazębienia.
Grubość zęba na średnicy wierzchołkowej (szerokość głowy zęba z uwzględnieniem zaostrzenia głowy zęba) powinna wynosić co najmniej 0,4 modułu normalnego: materiał kruchy

; ciągliwy 0,25Sprawdzenie interferencji: warunkiem uniknięcia interferencji jest zależność:
Dla zębnika ![]()
oraz dla koła![]()
Gdzie tgαP to kąt zarysu w punkcie podcięcia ewolwenty, a tgαA to kąt przyporu na kole ograniczającym czynną część ewolwenty.
W przypadku niespełnienia zależności należy ponownie dobrać współczynniki przesunięcia zarysu x1 i x2 (lub liczbę zębów)
Sprawdzenie podcinania zęba - kąt zarysu w punkcie podcięcia ewolwenty musi być większy od 0: tgαP > 0
Dla zębnika i koła.
Sprawdzenie wskaźnika przyporu czołowego: Wskaźnik przyporu czołowego εα = εα1 + εα2 > 1,2
W przeciwnym razie należy zwiększyć liczbę zębów z1 i z2, zmniejszyć x1 i zwiększyć x2 lub zmniejszyć sumę współczynników korekcji (x1 + x2)
Sprawdzanie luzu wierzchołkowego: na podstawie odległości osi a, średnicy podstaw i średnicy wierzchołków obliczamy osobno dla współpracujących kół współczynnik:
![]()
oraz ![]()
Warunek: c1/2 ~ (0,1 do 0,3) mn (u mullera >> 0)
Sprawdzenie poślizgu: należy obliczyć poślizg (η1 i η2) z osobna dla każdego ze współpracujących kół na podstawie przełożenia stopnia, kąta na średnicy tocznej i wierzchołkowej.
Punkt wyznaczony na odpowiednim wykresie współrzędnymi u η1 i η2 powinien leżeć w zaciemnionym polu tego wykresu.
Rzeczywista wartość obciążenia jednostkowego
Całkowite obciążenie zęba w warunkach ruchowych Qc uwzględnia charakterystykę pracy przekładni wyrażoną współczynnikami przeciążeń i nierównomierność obciążenia:
![]()
Współczynnik przeciążeń wew (dynamicznych) Kd
![]()
Pstat - siła statyczna,
Pmax - największa okresowo powtarzającą się wartość siły w sprężynie
Pod działaniem sił elementy przekładni ulegają odkształceniom, między innymi także zęby ulegają ugięciom i spłaszczeniom. Okazuje się, że same tylko odkształcenia są poważną przyczyną drgań, na wet jeżeli nie występują jednocześnie błędy kinematyczne.
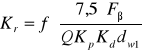
Współczynnik przeciążeń zew Kp
Współczynnik Kp jest liczbą, przez którą należy pomnożyć moment nominalny, aby otrzymać moment obliczeniowy, który działając stale, daje taki sam stopień niezawodności działania przekładni jak rzeczywiście działający, zmienny w czasie moment obrotowy.
W wielu przypadkach zmienia się w czasie nie tylko moment obrotowy, ale także prędkość obrotowa.
![]()
Współczynniki nierównomiernego obciążenia na szerokości koła:
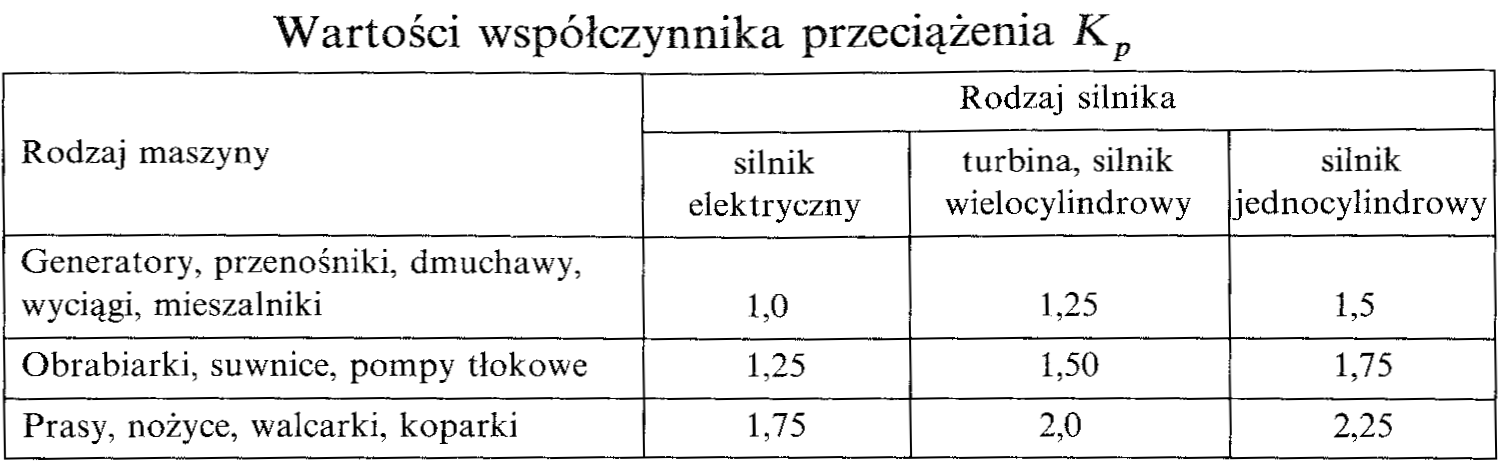
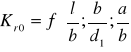
Kr - Nierównomierność rozkładu obciążenia - Wadliwa obróbka mechaniczna prowadzi do: nierównoległość osi, wichrowatość osi i błąd kierunku linii zęba. Skutki odchyłek wykonawczych zostały ujęte za pomocą współczynnika Kr.
Wartość odczytujemy z tablicy na podstawie nominalnego obciążenia kół Q,, współczynników Kp, Kd, średnicy koła tocznego oraz odchyłki kierunku zęba Fβ:
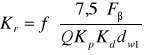
Kr0 - współczynnik wpływu odkształceń sprężystych - Często podczas pełnego obciążenia wałów ślad przylegania zębów jest nie prawidłowy. Wpływy ujęto w Kr0. Odczytujemy z wykresu z zależności pomiędzy:
Ks - Współczynnik nierównomierności rozkładu obciążenia (zęby proste =1) Wpływ skośnego położenia zębów na nierównomierność rozkładu, zależy od rodzaju zazębienia współpracujących kół i Czołowego wskaźnika przyporu ε
![]()
Wypadkowy współczynnik nierównomierności rozkładu obciążenia Krw ![]()
Współczynniki bezpieczeństwa:
Na naciski powierzchniowe
Zębnik: ![]()
Koło: ![]()
1,2 ≤ Xp < 2
Na złamanie
Zębnik ![]()
Koło ![]()
2 ≤ Xz < 4
yp1/2 - Współczynnik stanu powierzchni u podstawy zębów (chropowatość)
yk1/2 Współczynnik karbu
Zz1/2 Graniczna wytrzymałość zęba na złamanie
kz1/2 - Graniczna wytrzymałość zęba na naciski
Qc - Całkowite obciążenie zęba w warunkach ruchowych
q 1/2 -Współczynnik kształtu
qε - Współczynnik podziału sił na obie pary zębów
yβ - Współczynnik zależny od kąta pochylenia linii zęba
yh - Współczynnik wpływu oleju na wielkość i rozkład nacisków
6
Współczynniki nierównomiernego obciążenia na szerokości koła:
Kr - Nierównomierność rozkładu obciążenia - Wadliwa obróbka mechaniczna prowadzi do: nierównoległość osi, wichrowatość osi i błąd kierunku linii zęba. Skutki odchyłek wykonawczych zostały ujęte za pomocą współczynnika Kr.
Wartość odczytujemy z tablicy na podstawie nominalnego obciążenia kół Q,, współczynników Kp, Kd, średnicy koła tocznego oraz odchyłki kierunku zęba Fβ:
Kr0 - współczynnik wpływu odkształceń sprężystych - Często podczas pełnego obciążenia wałów ślad przylegania zębów jest nie prawidłowy. Wpływy ujęto w Kr0. Odczytujemy z wykresu z zależności pomiędzy:
Ks - Współczynnik nierównomierności rozkładu obciążenia (zęby proste =1) Wpływ skośnego położenia zębów na nierównomierność rozkładu, zależy od rodzaju zazębienia współpracujących kół i Czołowego wskaźnika przyporu ε
![]()
Wypadkowy współczynnik nierównomierności rozkładu obciążenia Krw ![]()
Współczynniki bezpieczeństwa:
Na naciski powierzchniowe
Zębnik: ![]()
Koło: ![]()
1,2 ≤ Xp < 2
Na złamanie
Zębnik ![]()
Koło ![]()
2 ≤ Xz < 4
yp1/2 - Współczynnik stanu powierzchni u podstawy zębów (chropowatość)
yk1/2 Współczynnik karbu
Zz1/2 Graniczna wytrzymałość zęba na złamanie
kz1/2 - Graniczna wytrzymałość zęba na naciski
Qc - Całkowite obciążenie zęba w warunkach ruchowych
q 1/2 -Współczynnik kształtu
qε - Współczynnik podziału sił na obie pary zębów
yβ - Współczynnik zależny od kąta pochylenia linii zęba
yh - Współczynnik wpływu oleju na wielkość i rozkład nacisków
Sprawdzenie poślizgu: należy obliczyć poślizg (η1 i η2) z osobna dla każdego ze współpracujących kół na podstawie przełożenia stopnia, kąta na średnicy tocznej i wierzchołkowej.Punkt wyznaczony na odpowiednim wykresie współrzędnymi u η1 i η2 powinien leżeć w zaciemnionym polu tego wykresu.
Współczynnik przeciążeń wew (dynamicznych) Kd
![]()
Pmax - największa okresowo powtarzającą się wartość siły w sprężynie
Pstat - siła statyczna,
Pod działaniem sił elementy przekładni ulegają odkształceniom, między innymi także zęby ulegają ugięciom i spłaszczeniom. Okazuje się, że same tylko odkształcenia są poważną przyczyną drgań, na wet jeżeli nie występują jednocześnie błędy kinematyczne.
Współczynnik przeciążeń zew Kp
Współczynnik Kp jest liczbą, przez którą należy pomnożyć moment nominalny, aby otrzymać moment obliczeniowy, który działając stale, daje taki sam stopień niezawodności działania przekładni jak rzeczywiście działający, zmienny w czasie moment obrotowy.
W wielu przypadkach zmienia się w czasie nie tylko moment obrotowy, ale także prędkość obrotowa.
![]()
Warunki poprawności geometrii zazębienia.
Grubość zęba na średnicy wierzchołkowej (szerokość głowy zęba z uwzględnieniem zaostrzenia głowy zęba) powinna wynosić co najmniej 0,4 modułu normalnego: materiał kruchy Sa > 0,4m; ciągliwy 0,25
Sprawdzenie interferencji: warunkiem uniknięcia interferencji jest zależność: Dla zębnika

oraz dla koła
Gdzie tgαP to kąt zarysu w punkcie podcięcia ewolwenty, a tgαA to kąt przyporu na kole ograniczającym czynną część ewolwenty. W przypadku niespełnienia zależności należy ponownie dobrać współczynniki przesunięcia zarysu x1 i x2 (lub liczbę zębów)Sprawdzenie podcinania zęba - kąt zarysu w punkcie podcięcia ewolwenty musi być większy od 0: tgαP > 0
Dla zębnika i koła.
Sprawdzenie wskaźnika przyporu czołowego: Wskaźnik przyporu czołowego εα = εα1 + εα2 > 1,2
W przeciwnym razie należy zwiększyć liczbę zębów z1 i z2, zmniejszyć x1 i zwiększyć x2 lub zmniejszyć sumę współczynników korekcji (x1 + x2)
Sprawdzanie luzu wierzchołkowego: na podstawie odległości osi a, średnicy podstaw i średnicy wierzchołków obliczamy osobno dla współpracujących kół współczynnik:
![]()
oraz ![]()
Warunek: c1/2 ~ (0,1 do 0,3) mn (u mullera >> 0)
Korekcja zęba
Korekcja dodatnia x>0 (jest ograniczona zaostrzeniem zęba, grubość zęba na kole wierzchołkowym nie może nie może być mniejsza niż 0,4 m, ze względu na luz). Dodatnie odsunięcie narzędzia w zazębieniu zewnętrznym w kierunku promieniowym o wielkość +xm umożliwia:
-wykonanie koła o małej liczbie zębów bez podcinania stopy zęba,
-uzyskanie dowolnej odległości osi kół przy zachowaniu znormalizowanych modułów i całkowitej liczby zębów,
-poprawienie wytrzymałości zazębienia na złamanie i na naciski (uniknięcie pracy zarysów w pobliżu koła zasadniczego, gdzie ewolwenta ma mały promień krzywizny, a więc naciski są duże).
Wpływ przesunięcia jest tym mniejszy im większa jest liczba zębów.
Korekcja ujemna:
-pogarsza warunki pracy,
-używana jest tylko dla uzyskania potrzebnej odległości osi w kołach o dużej liczbie zębów.
Rodzaje korekcji zazębienia.Przekładnie:
- bez przesunięcia (zazębienie niekorygowane) x1 = x2 =0
- o równej sumie przesunięć (P-0) x1 = -x2 lub x1+x2=0 (zalety: Taka sama odległość osi, Ten sam kąt zarysu, Uniknięcie podcinania zarysu, Zawsze dla dużego koła występuje ujemne przesunięcie zarysu, które ma mały wpływ na jego kształt, a dla koła o mniejszej ilości zębów przesunięcie dodatnie)
- przekładnia o dodatniej lub ujemnej sumie przesunięć (P) x1+x2≠0 (wymaga zmiany odległości kół,)
Rzeczywista wartość obciążenia jednostkowego Całkowite obciążenie zęba w warunkach ruchowych Qc uwzględnia charakterystykę pracy przekładni wyrażoną współczynnikami przeciążeń i nierównomierność obciążenia:
![]()
Dobór kąta pochylenia linii zęba.
Kąty pochylenia linii zęba mierzony na kole podziałowym dobiera się dla kół o zębach śrubowych w granicach 8 - 15 ° Korzystne jest tak dobrać kąt pochylenia linii zęba aby poskokowy wskaźnik zazębienia był równy 1.
![]()
Ze wzrostem kąta pochylenia linii zęba rośnie wartość siły osiowej, a tym samym rośnie dodatkowe obciążenie łożysk, stąd należy tak dobierać parametry z powyższego równania aby kąt pochylenia linii był możliwie mały.
Nominalna wartość obciążenia jednostkowego Q.
Obciążenie jednostkowe Q, Qu: Jako miarę obciążenia badanych kół zębatych przyjęto nominalny wskaźnik jednostkowy Q , który określa stosunek przenoszonego momentu do powierzchni tocznej koła zdefiniowany zależnością:

M1 - moment statyczny, którym obciążono przekładnię badaną bw - szerokość wieńca zębatego, dt - średnica toczna koła 1 W obliczeniach nacisków międzyrębnych występuje ona łącznie z funkcją przełożenia w postaci:
![]()
Dopuszczalne wartości Qu zależą głównie od:
- własności mechanicznych materiałów kz1, kz2
- geometrii zazębienia y1, yc, yB
- warunków ruchowych Kp Kd
[Dobór przełożenia całkowitego i na poszczególne stopnie.
Aby dobrać przełożenie pierwszego stopnia należy z wykresów wyznaczyć przedziały u1 a następnie tworzymy wykres zbiorczy i wybieramy optymalne u1
Mamy 4 kryteria: Ze względu na: objętość/ długość / średnicę/ moment bezwładności
Liczby zębów współpracujących kół powinny być liczbami pierwszymi tzn. nie miały wspólnych dzielników. Przy doborze można kierować się kilkoma wytycznymi:
Całkowity koszt produkcji przekładni powinien być możliwie mały
Całkowita masa przekładni, a zwłaszcza elementów wirujących powinna być możliwie mała
Całkowity moment bezwładności elementów wirujących powinien być jak najmniejszy
Duże koła poszczególnych stopni powinny mieć w przybliżeniu równe średnice aby jednakowo zanurzały się w oleju
Całkowita długość przekładni lub długość zajęta przez elementy wirujące powinna być mała.
Dobór liczby zębów zębnika z1.Należy dobrać taką liczbę zębów zębnika z1, aby wartość doskokowego wskaźnika przyporu εβ była bliska 1 oraz w przypadku kół o zębach skośnych kąt pochylenia linii zęba β mieścił się w optymalnych graniach, tj 8 ÷ 15 °
Dobór liczby zębów koła z2Korzystnie jest tak dobrać liczbę z2 aby była bliska iloczynowi z1 i u1 i była przy tym liczbą pierwszą względem z1 tj. aby liczby z1 oraz z2 nie miały wspólnych podzielników. w ten sposób ustala się ostatecznie wartość przełożenia danego stopnia u = z2/z1
Podstawowe parametry geometryczne kół o zębach prostych.
z - liczba zębów,
![]()
- podziałka nominalna - odległość pomiędzy dwoma sąsiednimi zębami (bokami) mierzona na łuku koła podziałowego.
![]()
moduł (znormalizowany)
α - nominalny kąt przyporu na śr podziałowej
![]()
- średnica podziałowa,
![]()
- średnica wierzchołk.,
![]()
- średnica stóp, podstaw,
b - szerokość wieńca zębatego
s - grubość zęba
Wg. PN:
h =2,25m - wysokość zęba (h=ha+hf)
hg = m - wysokość głowy zęba (od wierzchołku do śr podziałowej)
hs = 1,25m - wysokość stopy zęba
![]()
Podziałka zasadnicza
Wyszukiwarka