1.Budowa
[ 1,2]
Maszyna prądu stałego ma część nieruchomą -stojan i część ruchomą wirnik. Ważnym elementem konstrukcji jest prostownik mechaniczny, pod nazwą komutator, znajdujący się zwykle na wale maszyny i połączony z uzwojeniem twornika. Induktor maszyny prądu stałego znajduje się w stojanie, natomiast uzwojenie twornika umieszczone jest w wirniku, który w tym przypadku jest twornikiem. Prąd stały, który płynie w uzwojeniu stojana wymusza pole magnetyczne stałe wobec nieruchomego stojana, lecz wirujące w stosunku do obracającego się rotora. Podstawowym elementem konstrukcji maszyny prądu stałego jest jarzmo stojana (normalnie z żeliwa lub ze staliwa, choć może być również w postaci rury stalowej) . Jest ono jednocześnie częścią obwodu magnetycznego jak i elementem konstrukcyjnym, na którym mocowane są bieguny główne, bieguny pomocnicze, aparat szczotkowy ze szczotkami oraz tarcze łożyskowe.
Niezależnie od faktu, że pole magnetyczne w biegunach głównych ma wartość stałą , nie zmieniającą się w czasie, w nabiegunnikach powstają pulsacje strumienia., spowodowane otwartymi żłobkami twornika.
Aby uniknąć straty mocy od prądów wirowych nabiegunniki, jak również dość często i rdzenie biegunów wykonuje się z blachy o grubości 1-2mm. Nabiegunnik bieguna głównego powinien być możliwie jak najszerszy, musi on obejmować około 2/3 podziałki biegunowej twornika. Prawie wszystkie maszyny prądu stałego z wyjątkiem maszyn najmniejszej mocy, wykonuje się z biegunami pomocniczymi. Bieguny pomocnicze są elektromagnesami o masywnym (rzadko z blach) rdzeniu. Uzwojenie biegunów pomocniczych połączone jest zawsze szeregowo z uzwojenie twornika maszyny. Twornik maszyny prądu stałego wykonuje się z blach ze stali elektromagnetycznej. Celem tego rozwiązania jest zmniejszenie strat od prądów wirowych, powstających z powodu magnesowania okresowego. Żłobki rotora są przeważnie otwarte. Uzwojenie twornika mocuje się normalnie klinami niemagnetycznymi (z drewna, tekstolitu, itp.)lub bandażami z materiału niemagnetycznego.
Komutator składa się z izolowanych (miką, żywicą, masą plastyczną lub innym materiałem) między sobą wycinków miedzianych. Wszystkie wycinki odpowiednio zamocowane Tworzą walec miedziany poprzedzielany wstawkami izolacyjnymi. Komutator jest nieruchomy w stosunku do twornika, ma on z nim wspólną oś wirowania. Po zewnętrznej powierzchni komutatora ślizgają się nieruchome szczotki. Szczotki wykonuje się prasowanego proszku grafitowego z domieszkami. Szczotki zamocowane są w specjalnych trzymadłach szczotkowych aparatu szczotkowego, przyciskane są one do komutator za pomocą sprężyn.
Szczelina powietrzna między twornikiem a biegunami głównymi prądu stałego jest stosunkowo duża ( do 6-7 mm). Jeszcze większa jest szczelina między twornikiem a biegunami pomocniczymi (do kilku mm). Główne pole magnetyczne (pole indukcji wzajemnej) maszyny prądu stałego zamyka się przez jarzmo stojana, bieguny główne, szczelinę powietrzną oraz twornik. Oprócz tego pola istnieją również strumienie rozproszenia wzbudzenia i twornika. Obwód magnetyczny pola biegunów pomocniczych tworzą: jarzmo stojana, bieguny pomocnicze, szczelina powietrzna oraz ta część twornika, która znajduje się w tzw. strefie komutacji . W zależności od sposobu zasilania obwodu wzbudzenia, maszyny prądu stałego dzieli się na:
maszyny o wzbudzeniu niezależnym czyli obcym, włącznie z maszynami o
magnesach trwałych (rys. a,b)
maszyny o wzbudzeniu własnym:
2.1) bocznikowym (rys. c),
szeregowym (rys. d),
3) mieszanym szeregowo-bocznikowym (rys. e)
Rys. 1
2. MASZYNY PRĄDU STAŁEGO ZASADA DZIAŁANIA [1,2,3]
Bieguny maszyny prądu stałego wzbudzane są prądem stałym. Wytwarzają one w związku z tym stały w czasie strumień magnetyczny. Taki strumień wytwarza się i wtedy, kiedy biegunami są magnesy trwałe. Jeżeli twornik wiruje z prędkością obrotową n, przy liczbie par biegunów maszyny równej p, w każdym zezwoju lub przewodzie uzwojenia twornika będzie się indukowała siła elektromotoryczna o częstotliwości :
f=p*n. (2.0)
Prostowanie tego przemiennego napięcia w maszynie prądu stałego wykonuje się za pomocą komutatora i szczotek. Komutator ma tyle wycinków ile zwojów nawinięto na twornik. W omawianym przypadku indukowanie siły elektromotorycznej odbywa się tylko w tej części zwojów, która leży w obwodzie zewnętrznym twornika, ponieważ tylko tam linie pola przecinają przewody. Przy obracaniu się wirnika, niezależnie od tego, że przewody znajdujące się pod danym biegunem bez przerwy wymieniają się, pod nim zawsze znajduje się określona liczba zwojów, w których indukuje się SEM o tym samym kierunku. Jeśli liczba zwojów maszyny jest dostatecznie duża, można przyjąć, że w każdej przerwy się wymieniają. Można więc stwierdzić, że przy wirowaniu twornika przemienne w czasie (o częstotliwości f=p*n) siły elektromotoryczne Ec poszczególnych zezwojów przetwarzają się w stałą (f=0) siłę elektromotoryczną Ea mierzoną między nieruchomymi szczotkami. Szczotki w tym przypadku mogą być traktowane jako zaciski żródła stałej siły elektromotorycznej.
Rys. 2.1
Wykres sporządzony przy
Wykorzystaniu pierwszych
harmonicznych indukowanego
napięcia.
W rzeczywistości napięcie na zaciskach twornika waha się między dwiema niewiele różniącymi się wartościami Ea max i Ea min. Przyczyny tego stanu rzeczy są dwie. Po pierwsze, w trakcie jednego obrotu twornika każdy zezwój jest kilkakrotnie zwierany przez szczotki, co wyklucza jego siłę elektromotoryczną z ogólnej sumy SEM między szczotkami. Po drugie, ponieważ SEM Ec każdego zezwoju jest zmienną w czasie, to w trakcie przesunięcia twornika o kąt odpowiadający jednemu wycinkowi komutatora, suma wartości chwilowych tych SEM ulega zmianie.
Maksymalną wartość chwilową Ea max obrazuje średnica okręgu opisanego wokół wieloboku odwzorowującego sumy SEM Ec . Minimalna SEM Ea min powstaje przy obróceniu się wirnika o kąt =2/12, w ogólnym przypadku
k, (2.1)
- gdzie k oznacza liczbę wycinków komutatora. Względną pulsację powstającej na zaciskach twornika SEM.
![]()
Można obliczyć z wykresu wektorowego w każdym konkretnym przypadku. Przy małej liczbie k wartość procentowa pulsacji SEM między szczotkami maszyny prądu stałego jest niewielka. Jeden okres oscylacji SEM uzwojenia zamyka się w czasie obrócenia się twornika o jeden wycinek komutatora. Oznacza to, że częstotliwość pulsacji SEM występującej na zaciskach maszyny, będzie k razy większa od częstotliwości f SEM zezwoju.
Tego typu pulsacje napięcia mogą powodować poważne zakłócenia pracy urządzeń teletechnicznych. Szczotki rozdzielają uzwojenie twornika na dwie równolegle połączone części nazywane gałęziami równoległymi.
Rys.2.2
Połączenie gałęzi
równoległych.
Gałęzie równoległe muszą zawierać w każdej chwili jednakową liczbę elementów. W przeciwnym przypadku ich wypadkowe siły elektromotoryczne będą różne i w konsekwencji, pod wpływem różnicy między tymi SEM, w zamkniętym obwodzie uzwojenia twornika popłynąłby Prąd wyrównawczy, który jest szkodliwy i zbyteczny, ponieważ powoduje dodatkowe grzanie się i jednocześnie potęguje iskrzenie pod szczotkami. Jeśli szczotka jest szersza od wycinka komutatora, w niektórych momentach szczotki mogą zwierać jeden, dwa lub nawet więcej zwojów uzwojenia. Jeżeli w tych zwojach indukowana jest SEM, w zwartym obwodzie popłynie prąd, który powoduje grzanie się uzwojenia i komutatora, jak również staje się przyczyną iskrzenia pod szczotkami.
Aby uniknąć tego efektu, szczotki maszyn prądu stałego ustawia się tak, aby zwierały te zwoje lub zezwoje, w których nie indukuje się żadna siła elektromotoryczna. Są to zezwoje, znajdujące się na osi poprzecznej, nazywanej często geometryczną linią neutralną, ponieważ przy biegu jałowym pole magnetyczne maszyny wzdłuż tej osi jest równe zeru.
Pierwsze maszyny prądu stałego nie miały komutatora, natomiast szczotki ślizgały się po obwodzie twornika, dotykając przewodów wzdłuż swoistej ścieżki.
W przypadku , gdy szczotki znajdują się poza osią poprzeczną maszyny, siła elektromotoryczna twornika Ea mierzona na szczotkach , jest mniejsza od tej która by powstała, jeśliby szczotki leżały w lini neutralnej. Sumują się przy tym częściowo siły elektromotoryczne o przeciwnych znakach. W przypadku granicznym, kiedy szczotki znajdują się na osi podłużnej maszyny wypadkowa siła elektromotoryczna na zaciskach twornika jest równa zeru.
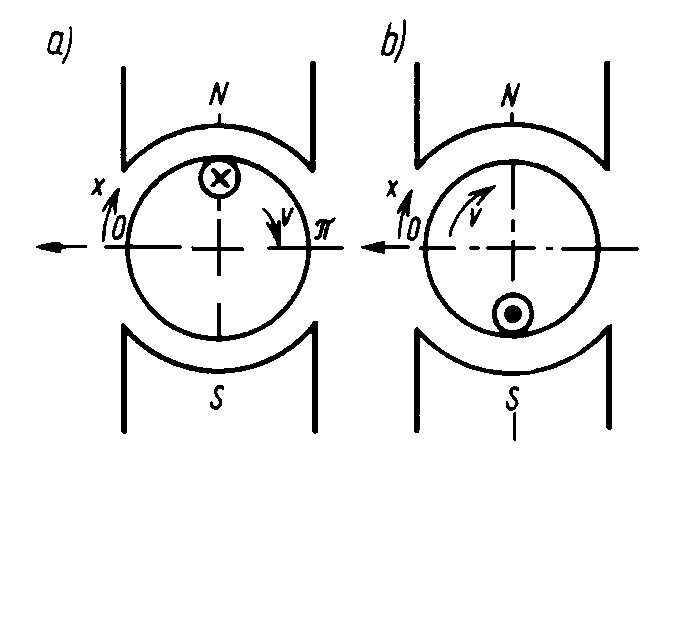
Maszynę elektryczną, w której wirujący przewodnik znajduje się w polu magnetycznym o różnej biegunowości, nazywa się maszyną heteropolarną, w odróżnieniu od maszyny homopolarnej. Praktycznie wszystkie współczesne maszyny prądu stałego są maszynami heteropolarnymi, w których wirujący wraz z wirnikiem przewodnik znajduje się okresowo pod wpływem pola magnetycznego o różnej biegunowości (N lub S).
Rozkład indukcji magnetycznej wzdłuż szczeliny powietrznej nie jest w maszynie stały. Jeśli przyjąć, że rozkład ten zmienia się sinusoidalnie według zależności
(zero w osi poprzecznej)
![]()
![]()
do wartości maksymalnej w osi podłużnej, czyli siła elektromotoryczna indukowana w pręcie, proporcjonalna do indukcji magnetycznej, zmienia swoją wartość wraz ze zmianą położenia, czyli:
![]()
B - indukcja,
L - przewodnik w polu magnet,
v- prędkość poruszającego się przewodnika.
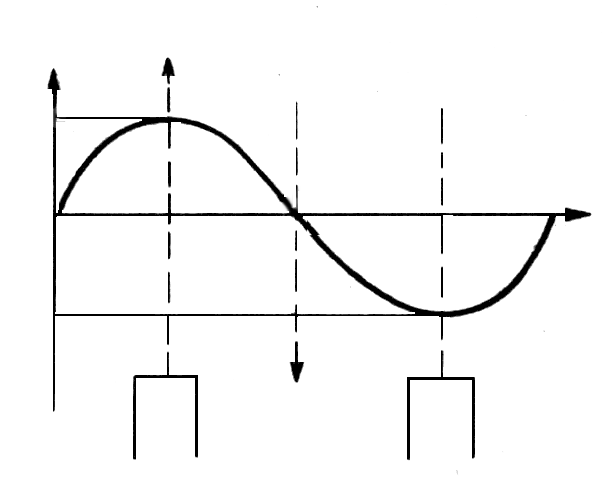
położenie przewodnika na obwodzie wirnika określa się w mierze łukowej 0...2 Przy założeniu sinusoidalnego rozkładu indukcji magnetycznej w szczelinie powietrznej na obwodzie wirnika i przy stałej prędkości wirowania pręta, siła elektromotoryczna indukowana w pręcie jest sinusoidalną funkcją czasu.
![]()
Dla umożliwienia przepływu prądu cewki do obwodu zewnętrznego umieszcza się na
wale wirnika dwa przewodzące pierścienie ślizgowe, do których łączy się poszczególne końce cewki. Po pierścieniach ślizgają się szczotki łączące wirującą cewkę z nieruchomym obwodem zewnętrznym. Ponieważ w poszczególnych punktach obwodu wirnika wartości i kierunki pola magnetycznego różnią się, a ich wartość średnia równa jest zeru, siła elektromotoryczna indukowana w cewce jest siłą elektromotoryczną przemienną. Po zamknięciu łącznika, pod wpływem indukowanej siły elektromotorycznej, w obwodzie złożonym z cewki i odbiornika popłynie prąd.
Aby w obwodzie zewnętrznym maszyny uzyskać napięcie o stałej biegunowości, a tym samym prąd o stałym zwrocie, trzeba maszynę wyposażyć w element prostowniczy. W wirującej maszynie elektrycznej elementem prostowniczym jest prostownik mechaniczny nazywany komutatorem. Najprostszy komutator otrzymuje się zastępując dwa pierścienie ślizgowe dwoma pierścieniami . Z półpierścieniami łączy się końce cewki, natomiast szczotki umieszcza się w osi poprzecznej maszyny. Półpierścienie wirują wraz z cewką. Przy przechodzeniu cewki spod wpływu bieguna N pod wpływ bieguna S zmienia się zwrot indukowanej w niej siły elektromotorycznej. Ponieważ jednoczenie ze zmianą położenia cewki poszczególne półpierścienie przesuwają się z jednej szczotki do drugiej, na szczotkach utrzymuje się stała biegunowość, a tym samym w obwodzie zewnętrznym płynie prąd o stałym zwrocie. Szczotki o biegunowości dodatniej oznacza się AI, natomiast szczotki o biegunowości ujemnej oznacza się A2.
W celu zwiększenia wartości siły elektromotorycznej występującej miedzy różnoimiennymi szczotkami łączy się w uzwojenie dużą liczbę cewek, powiększając w ten sposób długość czynną przewodnika poruszającego się w polu magnetycznym. Ponieważ w prętach umieszczonych na wirniku maszyny tworzy się siła elektromotoryczna, uzwojenie umieszczone na wirniku nazywa się uzwojeniem twornika, a cały wirnik można nazywać twornikiem.
W maszynie dwubiegunowej stosuje się dwie szczotki, natomiast liczba części pierścienia jest równa liczbie cewek. Poszczególne części pierścienia są nazywane wycinkami komutatora. Cewki l i II znajdują się w polu jednego bieguna, a zwroty sił elektromotorycznych w nich indukowanych są zgodne, są one zatem połączone szeregowo. Cewki 11 i IV połączone są również szeregowo, jako że zwroty indukowanych w nich się elektromotorycznych są również zgodne. Łatwo zauważyć, że cewki I i II oraz III i IV są połączone równolegle. Tak więc siła elektromotoryczna na szczotkach Al, A2 jest sumą sił elektromotorycznych indukowanych w cewkach I i II natomiast prąd twornika jest sumą dwóch prądów w gałęziach równoległych i9. Łatwo wyciągnąć wniosek, że o napięciu maszyny decyduje liczba szeregowo połączonych cewek, natomiast przy większej liczbie gałęzi równoległych wzrasta prąd znamionowy twornika. Można zauważyć, że uzwojenie maszyny prądu stałego jest uzwojeniem zamkniętym i że każdy wycinek komutatora łączy koniec jednej cewki z początkiem następnej.
![]()
Napięcie na zaciskach maszyny jest sumą sił elektromotorycznych indukowanych w poszczególnych cewkach połączonych szeregowo. Ponieważ osie cewek są przesunięte w przestrzeni, cewki nie znajdują się w jednakowych warunkach magnetycznych, a siła elektromotoryczna wypadkowa jest sumą wartości chwilowych sił elektromotorycznych indukowanych w poszczególnych cewkach. Przy połączeniu szeregowym dwóch cewek:
Wyznaczony graficznie przebieg siły elektromotorycznej wypadkowej przy dwóch połączonych szeregowo cewkach. Siła elektromotoryczna wypadkowa ma stały zwrot, jednak jej wartość chwilowa pulsuje w stosunku do wartości średniej:
eśr≠2em (2.8)
Przebieg siły elektromotorycznej wypadkowej przy dwóch połączonych szeregowo cewkach jest znacznie korzystniejszy niż przebieg siły elektromotorycznej cewki. Przydużej liczbie cewek połączonych szeregowo pulsacja siły elektromotorycznej wypadkowej jest minimalna. Tak więc komutator spełnia rolę mechanicznego przemiennika częstotliwości, przy czym w przypadku prądnicy jest on prostownikiem zmieniającym prąd przemienny na prąd o stałym zwrocie. Zadaniem silnika elektrycznego jest przetworzenie mocy elektrycznej w moc mechaniczną. Silnik musi być więc przyłączony do zewnętrznego źródła napięcia (sieci zasilającej). Pod wpływem napicia zewnętrznego U, przez cewkę nawiniętą na pierścieniu przepływa prąd I. Jeśli cewka o długości czynnej L znajduje się w polu magnetycznym o indukcji B, powstaje siła elektromagnetyczna F o wartości określonej wzorem:
F=BIL (2.9)
Siła elektromagnetyczna o zwrocie określonym regułą lewej dłoni, działając na ramieniu równym promieniowi wirnika, powoduje powstanie momentu elektromagnetycznego:
M=Fr (2.10)
nadającego wirnikowi ruch obrotowy o takiej prędkości kątowej, przy której wytworzony moment elektromagnetyczny równoważy moment mechanizmu napędzanego. Aby zmienić zwrot siły elektromagnetycznej należy zmienić albo zwrot prądu w cewce, albo biegunowość pola magnetycznego. Jednoczesna zmiana zwrotu prądu i biegunowości pola magnetycznego nie powoduje zmiany kierunku działania siły.
![]()
Moc mechaniczna wytworzona przez silnik
Jeśli uwzględnić związek miedzy prędkością kątową ω oraz prędkością obwodową v
![]()
oraz wzór na siłę elektromotoryczną rotacji
![]()
Z wzoru wynika, że moc mechaniczna wytworzona w silniku jest równa wewnętrznej mocy elektrycznej maszyny. W cewce nawiniętej na pierścieniu, który porusza się podobnie jak w przypadku prądnicy w polu magnetycznym, indukuje się również siła elektromotoryczna rotacji. Zwrot tej siły określa się podobnie jak w prądnicy, zgodnie z regułą prawej dłoni. Warto zwrócić uwagę, że zwrot siły elektromotorycznej indukowanej w cewce silnika jest przeciwny niż przepływającego prądu, podczas gdy w prądnicy zwrot prądu jest zgodny ze zwrotem siły elektromotorycznej indukowanej.
Przy pracy silnikowej maszyny prądu stałego komutator spełnia rolę falownika przetwarzającego dopływający z sieci prąd o stałym zwrocie w prąd przemienny o częstotliwości wynikającej z prędkości wirowania wirnika.
2.2 Budowa maszyn prądu stałego [1,2]
W maszynie prądu stałego wyróżnia się część nieruchomą nazywaną stojanem oraz część wirującą nazywaną wirnikiem lub twornikiem. Podstawową części stojana jest pierścień zewnętrzny nazywany jarzmem. Jarzmo wykonywane jest jako odlew staliwny lub konstrukcja spawana z grubej blachy stalowej, może być również wykonana jako odlew żeliwny. Ze względu na gorsze własności magnetyczne przekrój jarzm wykonanego z żeliwa musi być większy niż przekrój jarzma wykonanego ze staliwa. Do wewnętrznej powierzchni jarzma są przymocowane rdzenie elektromagnesów głównych i pomocniczych.
Bieguny mogą być jednolite lub wykonane z blach o grubości 0, . . . 1,5 mm. Rozszerzające się zakończenia biegunów noszą nazwę nabiegunników. Nabiegunniki stosowane są w celu uzyskania w szczelinie powietrznej rozkładu indukcji magnetycznej zbliżonego do sinusoidy. Na rdzeniach biegunów są osadzone cewki wzbudzające nazywane uzwojeniami. Na rdzeniach elektromagnesów głównych umieszczone jest uzwojenie wzbudzenia, nazywane też magnesującym. Przez uzwojenie wzbudzenia przepływa prąd nazywany prądem wzbudzenia lub magnesujący wytwarzającym przepływ wzbudzenia. Cewki elektromagnesów są przeważnie połączone szeregowo. Niemal wszystkie budowane obecnie maszyny prądu stałego mają bieguny komutacyjne nazywane też pomocniczymi 1ub zwrotnymi. Cewki uzwojenia biegunów komutacyjnych są połączone szeregowo i włączone szeregowo do obwodu uzwojenia twornika. Zadaniem biegunów komutacyjnych jest poprawienie warunków komutacji.
Bieguny komutacyjne są umieszczone miedzy biegunami głównymi w dużych maszynach o specjalnym przeznaczeniu; np. w silnikach walcowniczych, stosowane jest jeszcze jedno uzwojenie nazywane kompensacyjnym.
Uzwojenie kompensacyjne stosowane jest w celu skompensowania w przestrzeni pod biegunami głównymi oddziaływania pola wywołanego prądem twornika. Uzwojenie kompensacyjne umieszcza się w żłobkach wyfrezowanych w nabiegunnikach biegunów głównych. Uzwojenie kompensacyjne połączone jest szeregowo z uzwojeniem twornika. Na wale maszyny umieszczony jest rdzeń twornika wraz z uzwojeniem twornika oraz komutator . Magnetycznie czynna część wirnika (rdzeń) składa się z krążków blachy twornikowej jednostronnie izolowanej. Blachy są osadzone bezpośrednio na wale lub na specjalnej konstrukcji nośnej. Na obwodzie krążków są wycięte wgłębienia, które po złożeniu krążków tworzą żłobki. W żłobkach twornika umieszczone jest uzwojenie nazywane uzwojeniem twornika. Uzwojenie twornika połączone jest z komutatorem.
Komutator składa się z wielu wycinków (klepek, działek) przedzielonych warstewkami twardego mikanitu o grubości 0,5. . .1,0 mm oraz izolowanych od konstrukcji nośnej również mikanitem. Po komutatorze ślizgają się szczotki. Szczotki umieszczone są w obsadach szczotkowych osadzonych na sworzniach izolowanych od korpusu maszyny. Sworzni jest zwykle tyle ile biegunów. Im większy jest prąd znamionowy maszyny, tym większa liczba obsad szczotkowych osadzonych jest na sworzniu. Szczotki wykonywane są z węgla, grafitu lub ich mieszaniny. Wał osadzony jest w łożyskach ślizgowych, rolkowych lub kulkowych. Końce uzwojeń stojana oraz wyprowadzenia z obsad szczotkowych dołączone są do tabliczki zaciskowej i oznaczone literami, po których można poznać typ maszyny. Do podstawowych znamion maszyny można zaliczyć: napięcie, prąd, moc oraz prędkość kątową (obrotową). Jako moc znamionową podaje się dla prądnic moc elektryczną oddawaną, natomiast dla silników moc mechaniczną użyteczną.
2.3 Uzwojenia tworników maszyn prądu stałego [1,2]
Uzwojenie twornika maszyn komutatorowych jest zawsze uzwojeniem zamkniętym, co znaczy, że wychodząc z dowolnego punktu uzwojenia powraca się do tego punktu po obejściu całego uzwojenia. Rozróżnia się dwa rodzaje uzwojeń tworników - uzwojenia pierścieniowe i bębnowe. Uzwojenie pierścieniowe nie jest obecnie stosowane ze względu na większe zużycie materiału i niewystarczającą wytrzymałość mechaniczną. W uzwojeniu pierścieniowym podczas ruchu wirnika tylko zewnętrzny bok cewki przecina linie pola magnetycznego, czyli tylko część cewki bierze udział w tworzeniu siły elektromotorycznej.
Technicznym udoskonaleniem uzwojenia pierścieniowego jest uzwojenie bębnowe. Cewki uzwojenia bębnowego są umieszczone w żłobkach wyciętych wzdłuż twornika na jego zewnętrznej powierzchni. W uzwojeniu bębnowym oba boki cewki poruszają się w polu magnetycznym biegunów, wiec w obu bokach cewki indukują się siły elektromotoryczne. Zwroty indukowanych sił elektromotorycznych są przeciwne, mogą się wiec w obwodzie cewki sumować. Końce cewki przyłączone są do dwóch wycinków komutatora. Uzwojenie bębnowe umieszczone w żłobkach charakteryzuje się dużą wytrzymałością mechaniczną, jest odporne na siły odśrodkowe i może być stosowane w maszynach o dużej prędkości wirowania.
Cewki uzwojenia bębnowego mogą mieć jeden zwój lub więcej zwojów. Uzwojenia tworników maszyn prądu stałego są wykonywane jako dwuwarstwowe. Odległość między bokami tej samej cewki nazywa się rozpiętością cewki. Cewka, której rozpiętość różni się od podziałki biegunowej, nazywa się cięciwową.
Zwykle w jednej warstwie żłobka znajduje się 2. . . 5 boków cewek. Liczbę boków obok siebie leżących w żłobku oznacza się literą u. Przy oznaczaniu poszczególnych boków szczególnie korzystna jest numeracja nazywana komutatorową. Przy numeracji komutatorowej boki cewek leżące w warstwie górnej oznacza się numerem wycinka
komutatora. Boki cewek leżące w warstwie dolnej oznacza się numerem odpowiedniego boku warstwy górnej z pomocniczą kreską.. Jeśli liczbę żłobków w tworniku oznaczyć przez Ż, wówczas liczbę K wycinków komutatora określa związek .
K=uŻ (2.14)
Uzwojenie, w którym wszystkie boki górne znajdują się w jednym żłobku, natomiast boki dolne umieszczone są w różnych żłobkach, nazywane jest schodkowym.
Właściwości poszczególnych typów uzwojeń analizuje się na podstawie schematów. Na schemacie nierozwiniętym uzwojenie przedstawia się tak, jak jest ono widoczne z przodu twornika od strony komutatora. Na schematach uzwojeń wykreśla się wycinki komutatora oraz zaznacza ślady magnesów. Liczba górnych boków cewek jest równa liczbie wycinków komutatora. Na schematach na ogół zaznacza się szczotki o szerokości równej jednej podziałce komutatora. Jednak najmniejsza szerokość szczotki powinna być taka, aby przy przejściu z wycinka na wycinek nie nastąpiła przerwa w obwodzie. Uwzględniając izolację międzywycinkową szczotka musi być szersza od wycinka komutatora. Poskokiem przejściowym pierwszym y1 nazywa się rozpiętość cewki (poskok tylny) a odległość boków sąsiednich cewek, które schodzą się na tym samym wycinku komutatora nazywa się poskokiem przejściowym drugim y2 (poskok przedni). Poskokiem wypadkowym y (poskok całkowity) nazywa się podległość między początkowymi bokami sąsiednich cewek. Odległość między bokami tej samej cewki określona przez liczbę żłobków nazywa się poskokiem żłobkowym yż Do charakterystycznych parametrów uzwojenia zalicza się również poskok komutatorowy yk, który podaje liczbę wycinków miedzy początkiem a końcem tej samej cewki. Poskok komutatorowy podaje odległość, w wycinkach komutatora, pomiędzy wycinkami, do których są przyłączone jednakoimienne boki dwóch szeregowo połączonych cewek.
Uzwojenia tworników maszyn prądu stałego można wykonać jako uzwojenia pętlicowe lub faliste, mające kształty pętli lub fali.
2.4 Siła elektromotoryczna indukowana w uzwojeniu twornika [1,2]
Siłę tą indukowaną w pręcie, który wiruje w polu magnetycznym określa wzór
E=Blvsinα (2.15)
Na podstawie rozkładu indukcji magnetycznej w szczelinie powietrznej określono związek między strumieniem magnetycznym a indukcją.
ϕ=Bplibi=Bpαiliτ (2.16)
α-współczynnik idealny zapełnienia podziałki biegunowej
τ-podziałka biegunowa
li -długość idealna twornika
Współczynnik α jest określony stosunkiem łuku idealnego bieguna bi do podziałki biegunowej τ.
Długość czynna szeregowo połączonych prętów uzwojenia
l=αi Nli/2a (2.17)
![]()
Po podstawieniu do wzoru na siłę elektromotoryczną otrzymujemy
Wzór na siłę elektromotoryczną można wykorzystać do obliczenia charakterystyki magnesowania maszyny, czyli określenia zależności siły elektromotorycznej od przepływu lub prądu wzbudzenia.
2.5 Komutacja w maszynach prądu stałego [1 ]
W cewce znajdującej się pod biegunem N indukowała się siła elektromotoryczna o zwrocie oznaczonym strzałką. Jeśli cewka znajdowała się pod biegunem S, indukowała się w niej siła elektromotoryczna o zwrocie przeciwnym. W obu przypadkach zwrot prądu przepływającego przez cewkę był zgodny ze zwrotem indukowanej siły elektromotorycznej. Jeśli cewka znajdowała się w położeniu pośrednim, czyli w tzw. strefie geometrycznie neutralnej, która była równocześnie strefą magnetycznie neutralną, siła elektromotoryczna się w niej nie indukowała. W czasie, w jakim cewka jest zwarta przez szczotkę, musi w cewce nastąpić zmiana zwrotu prądu. Wszystkie zjawiska towarzyszące zmianie zwrotu prądu w cewce zwartej przez szczotkę nazywa się komutacją. Czas, jaki upływa od chwili rozpoczęcia komutacji do jej zakończenia, nazywa się okresem komutacji. Przy znanej szerokości szczotki bsz oraz prędkości obwodowej komutatora vk okres komutacji można obliczyć z wzoru:
![]()
Jako idealną przyjmuje się tzw. komutację prostoliniową, w czasie której zmiana prądu i w cewce zwartej przez szczotkę przebiega liniowo, przy czym w połowie okresu komutacji prąd i jest równy zeru. Siła elektromotoryczna samoindukcji, dążąc do podtrzymania zwrotu prądu, jaki płynie przez cewkę w chwili rozpoczęcia komutacji, powoduje tzw. komutację opóźnioną. Komutacją opóźnioną nazywa się taką komutację, w czasie której ( w połowie okresu komutacji ) prąd w cewce nie zdążył zmaleć do zera. Jeśli szczotka znajduje się w osi poprzecznej maszyny, czyli w strefie geometrycznie neutralnej, czynnikiem który również powoduje komutację opóźnioną, jest oddziaływanie twornika. Jak wiadomo, pod wpływem oddziaływania twornika następuje wysuniecie strefy magnetycznie neutralnej ze strefy geometrycznie neutralnej. Zatem w cewce, będącej w stanie komutacji, a znajdującej się w strefie, w której istnieje pole magnetyczne, indukuje się siła elektromotoryczna rotacji podtrzymująca prąd w cewce. Komutacja opóźniona jest bardzo niekorzystna. Jeśli bowiem po okresie komutacji szczotka schodzi z wycinka komutatora wówczas, gdy podtrzymywany indukowaną siłą elektromotoryczną prąd w cewce nie zdąży osiągnąć wartości prądu gałęzi (ig), szczotka schodząc z wycinka może pociągnąć za sobą łuk elektryczny. Jeśli łuk przejdzie na dalsze wycinki dochodzi do zwarcia na komutatorze, a tym samym do zniszczenia maszyny. W maszynie nie można uzyskać komutacji prostoliniowej, również ze względu na wpływ rezystancji uzwojeń cewki. Aby zapobiec wystąpieniu komutacji opóźnionej, należy doprowadzić do komutacji przyspieszonej. Komutacja przyspieszona jest wtedy, gdy zmiana prądu w cewce następuje w pierwszej połowie okresu komutacji. Komutację przyspieszoną osiągnie się wówczas, gdy w zwartej przez szczotkę cewce zostanie wyidukowana siła elektromotoryczna rotacji - w przypadku prądnicy jej zwrot jest zgodny ze wzrostem siły elektromotorycznej indukowanej przez ten biegun, pod który przechodzi cewka po zakończeniu komutacji. Natomiast w przypadku silnika zwrot indukowanej siły elektromotorycznej powinien być zgodny ze zwrotem siły elektromotorycznej indukowanej przez biegun, spod którego cewka wychodzi.
3Silnik szeregowy [1,2]
Właściwości ruchowe silnika szeregowego wynikają z szeregowego połączenia uzwojenia wzbudzenia z uzwojeniem twornika . W silniku szeregowym prąd wzbudzenia, równy prądowi twornika, jest jednoczenie prądem pobieranym przez silnik z sieci, czyli
Iw=It=I (3.1)
W silniku szeregowym przepływ wzbudzenia zwiększa się wraz ze wzrostem prądu twornika. Z równania równowagi napięć łatwo wywnioskować, że ze względu na dużą zmienność strumienia magnetycznego prędkość kątowa silnika musi się zmieniać w szerokim zakresie. Jeśli bowiem pominąć nasycenie obwodu magnetycznego, to oddziaływanie twornika oraz spadki napięć w obwodzie twornika, można łatwo stwierdzić, że prędkość kątowa ωm≅U/cIw (3.2) będzie się zmieniała zależnie od prądu hiperboliczne.Przy małych obciążeniach, ze względu na małą wartość przepływu wzbudzenia, silnik szeregowy wykazuje niebezpieczny wzrost prędkości kątowej. Rzeczywisty przebieg prędkości kątowej w funkcji momentu obciążenia odbiega nieco od przebiegu teoretycznego, szczególnie w małych maszynach, w których znaczną rolę odgrywa rezystancja obwodu twornika oraz opory mechaniczne.
Jeśli charakterystyki mechaniczne maszyn innych typów są podobne do charakterystyki silnika szeregowego, charakterystyki te określa się jako charakterystyki typu szeregowego.
Charakterystyka momentu silnika prądu stałego określoną wzorem:
c M= cϕI t (3.3)
można w przypadku silnika szeregowego, przy pominięciu nasycenia obwodu magnetycznego i oddziaływania twornika, czyli przy założeniu proporcjonalności strumienia do prądu twornika , opisać wzorem:
M = c I 2t (3.4)
Trzeba jednak pamiętać, że rzeczywista charakterystyka momentu odbiega nieco od przebiegu teoretycznego .
Zaletą silnika szeregowego jest duża wartość rozwijanego momentu, szczególnie przydatna w warunkach rozruchu silnika, natomiast wadą duża zmienność prędkości kątowej oraz możliwość rozbiegania się silnika większych mocy przy niewielkich obciążeniach. Aby uniemożliwić ich rozbieganie się, mogą być stosowane tylko w tych układach napędowych, w których mogą być trwale sprzęgane z urządzeniem napędzanym.
![]()
Zastosowanie silników szeregowych jest w zasadzie ograniczone do pojazdów trakcyjnych. Metody nastawiania prędkości kątowej silników szeregowych wynikające z wzoru:
są dostosowane do potrzeb i warunków trakcyjnych. Tak więc nie stosuje się regulacji przez podwyższanie napięcia zasilającego, natomiast często zmienia się prędkość kątową przez obniżenie napięcia oraz włączenie do obwodu maszyny rezystora regulacyjnego. W szczególnych przypadkach nastawianie prędkości kątowej silnika szeregowego może być również przeprowadzone przez zmianę przepływu wzbudzenia, czyli przez zmianę strumienia magnetycznego. Przy zwiększaniu prędkości kątowej w celu zmniejszenia strumienia magnetycznego uzwojenie wzbudzenia może być bocznikowane, albo też uzwojenie wzbudzenia może być wykonane jako uzwojenie z zaczepami. Jeśli uzwojenie wzbudzenia zostanie zbocznikowane rezystancją lub jeśli w obwód twornika zostanie włączona tylko część uzwojenia wzbudzenia, w maszynie zostanie wytworzony mniejszy przepływ wzbudzenia, a tym samym zmaleje strumień magnetyczny. Zwiększenie prądu wzbudzenia, powodujące zmniejszenie prędkości kątowej, można zrealizować przez zbocznikowanie uzwojenia twornika. W tym przypadku przez twornik może przepływać prąd o wartości wymuszonej przez obciążenie, natomiast prąd wzbudzenia może być większy od prądu twornika o prąd przepływający przez rezystancję bocznikującą uzwojenie twornika.
W projekcie wykorzystywano literaturę autorów:
1. ZBIGNIEW STEIN „MASZYNY I NAPĘD ELEKTRYCZNY”.2. JAN STEFANIK „EKSPLOATACJA I REMONT MASZYN ELEKTRYCZNYCH”3. WOJCIECH TARNOWSKI „KOMPUTEROWY SYSTEM SYMULACJI SIMULINK Z
WPROWADZENIEM DO MATLAB'A”.
4. MROZEK ZYGMUNT „MATLAB:UNIWERSALNE ŚRODOWISKO DO OBLICZEŃ
NAUKOWO - TECHNICZNYCH”.
1
5
(2.2)
ch indukowanego napięcBłąd! Nie można tworzyć obiektów przez edycję kodów pól.a
(2.4)
(2.5)
ą obojętną lub neuBłąd! Nie można tworzyć obiektów przez edycję kodów pól.ralną.
Błąd! Nieprawidłowy obiekt osadzony.
Rys. 2.3
Zasada określania zwrotu siły
elektromotorycznej
indukowanej w pręcie wirnika.
(2.6)
Rys. 2.4
Rozkład indukcji magnetycznej wzdłuż szczeliny powietrznej.
(2.7)
(2.11)
(2.12)
(2.13)
(2.18)
![]()
(2.19)
(3.5)
(2.3)
Wyszukiwarka