ĆWICZENIE 22
BADANIE PRĄDNICY SYNCHRONICZNEJ PRACUJĄCEJ NA SIEĆ SZTYWNĄ
Program ćwiczenia
Synchronizacja maszyny synchronicznej z siecią sztywną.
Pomiar krzywych V.
Pomiar charakterystyki obciążenia przy cosϕ = 0 ind.
Wyznaczenie reaktancji Potiera.
Wyznaczenie znamionowego prądu wzbudzenia i zmienności napięcia metodą wykresu amerykańskiego.
Cel ćwiczenia
Najczęściej spotykanym w praktyce przypadkiem pracy prądnicy synchronicznej jest jej praca równoległa z siecią energetyczną o bardzo dużej mocy, praktycznie stałym napięciu i stałej częstotliwości. Sieć taką nazywa się siecią sztywną. Celem ćwiczenia jest poznanie metody włączania maszyny synchronicznej do sieci sztywnej oraz badanie jej zachowania się podczas zmian prądu wzbudzenia i momentu napędowego. Ćwiczenie ma również na celu poznanie metod zastępczych wyznaczania niektórych parametrów roboczych maszyny synchronicznej.
Omówienie programu ćwiczenia
Włączenie prądnicy do pracy równoległej
samosynchronizacji,
synchronizacji.
równość modułów napięć maszyny i sieci,
równość częstotliwości maszyny i sieci,
zgodność kolejności faz napięć maszyny i sieci,
równość wartości chwilowych napięć maszyny i sieci.
Pomiary krzywych V (Mordeya)
Wyznaczenie charakterystyki obciążenia
Wyznaczanie reaktancji Potiera
Wyznaczenie zmienności napięcia i znamionowego prądu wzbudzenia
Sprawozdanie z ćwiczenia
protokół z pomiarów,
wykresy krzywych V (I = f(If) przy P = const),
wykresy charakterystyk cosϕ = f(If) przy P = const,
wyznaczenie reaktancji Potiera,
wyznaczenie znamionowego prądu wzbudzenia i znamionowej zmienności napięcia metodą wykresu amerykańskiego,
uwagi i wnioski.
Pytania kontrolne
Podać warunki synchronizacji maszyny synchronicznej z siecią.
Opisać znane metody synchronizacji.
Co należy zrobić, aby po zsynchronizowaniu prądnicy z siecią obciążyć ją mocą czynną?
Jaki charakter wykazuje maszyna synchroniczna „przewzbudzona”, a jaki „niedowzbudzona”? Co należy rozumieć przez te określenia?
Uzasadnić, dlaczego minima krzywych V odpowiadają obciążeniu czysto czynnemu maszyny.
Co to jest granica stabilności? Opisać zjawisko utraty synchronizmu.
Opisać metodę wyznaczania reaktancji Potiera.
Opisać metodę wykresu amerykańskiego wyznaczania prądu wzbudzenia i zmienności napięcia.
Maszynę synchroniczną można włączyć do sieci dwiema metodami:
Pierwszą metodę stosuje się powszechnie do maszyn małych mocy, zwłaszcza silników. Jest ona dokładnie omówiona w ćwiczeniu nr 24. Metoda synchronizacji to przyłączanie maszyny do sieci w taki sposób, aby nie wystąpił udar prądowy. Możliwe to jest wtedy, gdy w chwili włączenia są spełnione warunki synchronizacji, czyli:
Prosty układ umożliwiający stwierdzenie, czy warunki te zostały spełnione przedstawiono na rys. 22.1. Przy otwartym wyłączniku należy regulować prędkość obrotową silnika napędowego tak, aby doprowadzić prądnicę do prędkości znamionowej i wzbudzić ją do napięcia UG = Us. Następnie należy sprawdzić zgodność kolejności faz przyłączonych do obydwu stron wyłącznika sprzęgającego. Jednym ze sposobów jest użycie tzw. wskaźnika kolejności faz, który działa podobnie jak silnik asynchroniczny tarczowy. Duży poślizg tarczy wskaźnika ułatwia zaobserwowanie kierunku jej wirowania. Wskaźnik ten przyłącza się do zacisków wyłącznika po stronie sieci, a następnie, bez zmiany kolejności przewodów, do zacisków po stronie prądnicy. Jeśli w obydwóch wypadkach kierunek wirowania tarczy jest taki sam, to znaczy, że prądnica została przyłączona prawidłowo. Jeśli wynik testu oznacza brak zgodności faz, to należy, po uprzednim wyłączeniu napięcia, zamienić miejscami dwa dowolne przewody fazowe po stronie sieci lub prądnicy. Po tej zmianie trzeba powtórzyć sprawdzenie zgodności kolejności faz.
Rys. 22.1. Układ do sprawdzenia warunków synchronizacji
Jeśli Us ≈ UG oraz fs ≈ fG, wskazówka woltomierza V0 będzie się wolno wahać. Zbyt szybkie wahania oznaczają, że częstotliwości sieci i prądnicy bardzo się różnią, natomiast jeśli mimo małej różnicy częstotliwości wskazówka woltomierza nie cofa się okresowo do zera, oznacza to, że występuje różnica między modułami napięć Us i UG. Należy zwrócić uwagę na to, że maksymalne napięcie pojawiające się na woltomierzu V0 jest równe podwójnemu napięciu międzyfazowemu, co należy brać pod uwagę przy doborze zakresu pomiarowego tego przyrządu. Jeśli nie ma odpowiedniego woltomierza, można w miejsce połączenia między zaciskami 3 i 3' włączyć dodatkowo woltomierz identyczny jak V0. Będą się one wahać synchronicznie, a maksymalne napięcie na każdym nie przekroczy wartości napięcia międzyfazowego.
W chwili, w której woltomierz V0 wskazuje 0, spełnione są warunki synchronizacji. Ze względu na pewne niewielkie opóźnienie reakcji obserwatora impuls na załączenie stycznika należy podać, gdy wskazówka zbliża się do pozycji 0. Jeśli synchronizacja została przeprowadzona prawidłowo, to w chwili włączenia prądnicy nie ma charakterystycznego tąpnięcia, a maszyna nie pobiera żadnego prądu. Jeśli prądnica jest wyposażona w tachometr, to użycie częstotliwościomierza pokazanego na rys. 22.1 nie jest konieczne.
Obecnie do kontroli warunków synchronizacji bardzo często stosuje się tzw. kolumny synchronizacyjne w wykonaniach firmowych. Mają one wskaźnik różnicy napięć ΔU, wskaźnik różnicy częstotliwości Δf oraz synchronoskop, który jest wskaźnikiem zgodności fazowej napięć prądnicy i sieci (rys. 22.2). Wskazówka synchronoskopu wiruje z częstotliwością równą różnicy częstotliwości sieci i prądnicy. Zgodność faz tych napięć występuje, gdy wskazówka synchronoskopu pokryje się z pionową kreską na jego tarczy.
Ponieważ kolumna synchronizacyjna jest urządzeniem jednofazowym, przed przystąpieniem do synchronizacji należy, za pomocą wskaźnika kolejności faz, stwierdzić prawidłowość przyłączenia prądnicy do stycznika synchronizacyjnego. Ze względu na możliwość uszkodzenia przyrządów kolumny przy dużych różnicach napięć i częstotliwości należy najpierw nastawić zgrubnie Us ≈UG oraz fs ≈fG. Następnie włącza się kolumnę przez wciśnięcie przycisku P i obserwując wskazania ΔU i Δf, należy doprowadzić do zrównania napięć i częstotliwości. W chwili gdy wskazówka synchronoskopu zbliża się do pionowej kreski, należy załączyć stycznik sprzęgający maszynę z siecią. W ćwiczeniu należy przeprowadzić synchronizację obydwiema opisanymi metodami.
Rys. 22.2. Schemat układu synchronizującego z kolumną synchronizacyjną
Krzywe V przedstawiają zależność prądu twornika Ia od prądu wzbudzenia If przy stałych wartościach napięcia twornika U, mocy czynnej P oraz częstotliwości. Ilustrują one zachowanie się maszyny synchronicznej pracującej równolegle z siecią sztywną w całym zakresie możliwych zmian prądu wzbudzenia.
Schemat pomiarowy przedstawiono na rys. 22.3. Prądnica synchroniczna połączona jest ze stycznikiem synchronizującym przez zestaw pomiarowy umożliwiający pomiar mocy trójfazowej, prądu oraz napięcia twornika. Sieć sztywną reprezentują zaciski wtórne autotransformatora regulacyjnego zasilanego z sieci energetycznej. Silnikiem napędowym jest bocznikowy silnik prądu stałego.
Po uruchomieniu silnika i wzbudzeniu prądnicy do napięcia znamionowego należy załączyć wyłącznik W1 i nastawić, za pomocą autotransformatora, napięcie sieci na wartość Un. Następnie (w sposób opisany w p. 3.1) zsynchronizować prądnicę z siecią.
Wyznaczanie krzywych V rozpocząć od krzywej dla P = 0. Prąd wzbudzenia należy zwiększyć do wartości znamionowej. Watomierz w zestawie pomiarowym, powinien wskazywać zero. Moc czynną ewentualnie koryguje się regulując prąd wzbudzenia silnika napędowego, np. jeśli watomierz wychyla się w prawo, co oznacza, że prądnica generuje moc czynną, należy zmniejszyć moment napędowy przez zwiększenie prądu wzbudzenia silnika. Prąd wzbudzenia prądnicy należy stopniowo zmniejszać do zera. Prąd twornika będzie początkowo malał do wartości bliskiej zeru, a następnie rósł do Un / Xd (rys. 22.4). Prawa gałąź otrzymanej w ten sposób krzywej V odpowiada pracy prądnicy przy przewzbudzeniu. Maszyna zachowuje się względem sieci jak kondensator, pobierając moc bierną pojemnościową (wytwarza moc bierną indukcyjną). Ten zakres pracy jest wykorzystywany przy pracy kompensatorowej maszyny synchronicznej. Lewa gałąź krzywej odpowiada niedowzbudzeniu prądnicy. Stanowi ona dla sieci obciążenie bierne indukcyjne. Gdy prąd wzbudzenia jest równy zeru, maszyna synchroniczna stanowi trójfazowy odbiornik indukcyjny o reaktancji równej Xd.
W podobny sposób wyznacza się krzywe V dla P = 0,25; 0,5; 0,75; i 1,0·Pn. Pomiar rozpoczyna się od przewzbudzenia prądnicy do wartości odpowiadającej 1,2·In i nastawienia odpowiedniej mocy czynnej przez zmianę prądu wzbudzenia silnika. Następnie stopniowo zmniejszając prąd wzbudzenia prądnicy mierzy się prąd twornika i prąd wzbudzenia, upewniając się, czy moc czynna pozostaje na zadanym poziomie. Kontrolować również należy stałość napięcia na zaciskach sieci i za pomocą autotransformatora korygować ewentualne różnice. Podobnie jak przy P = 0, prąd twornika początkowo maleje, a następnie zwiększa się. Należy starać się uchwycić punkty, w których prąd ma wartość najmniejszą. Odpowiadają one obciążeniu przy cosϕ = 1,0 a krzywa łącząca je jest obrazem charakterystyki regulacji przy obciążeniu czysto czynnym.
Aby zapobiec wypadnięciu prądnicy z synchronizmu prąd wzbudzenia nie jest zmniejszany do zera jak przy P = 0, lecz do tzw. granicy stabilności. Prąd wzbudzenia odpowiadający, przy danej mocy P, granicy stabilności można dla badanej maszyny oszacować według wzoru
![]()
(22.1)
Przy małych prądach wzbudzenia i dużej mocy czynnej należy szczególnie ostrożnie regulować moment napędowy silnika, aby przez jego gwałtowny wzrost nie doprowadzić do utraty synchronizmu. W przypadku wypadnięcia prądnicy z synchronizmu, co manifestuje się wahaniem wskazówek przyrządów oraz nierównomiernym biegiem maszyny, należy natychmiast wyłączyć stycznik synchronizacyjny i powtórnie zsynchronizować. Wyniki pomiarów zestawić w tabeli 22.1.
W tabeli:
![]()
(22.2)
Na podstawie otrzymanych wyników należy wykreślić krzywe V (rys. 22.4) oraz charakterystyki cosϕ = f(If) (rys. 22.5).
Tabela 22.1
U = Un, f = 50Hz
Lp. |
Iu |
Iv |
Iw |
Iśr |
If |
cosϕ |
Uwagi |
|
A |
A |
A |
A |
A |
- |
|
|
|
|
|
|
|
|
P = 0 |
|
|
|
|
|
|
|
P = 0,25·Pn |
Rys. 22.3. Układ do pomiaru krzywych V
Rys. 22.4. Krzywe V
Rys. 22.5. Charakterystyki cosϕ = f(If) przy P = const
Charakterystyka obciążenia jest to zależność napięcia twornika maszyny synchronicznej od prądu wzbudzenia przy stałym prądzie twornika i stałym współczynniki mocy (U = f(If) przy I = const i cosϕ = const). Największe znaczenie praktyczne ma charakterystyka obciążenia wyznaczana dla I = In oraz cosϕ = 0 ind., ponieważ jest ona wykorzystywana do wyznaczania reaktancji Potiera. Ta charakterystyka zostanie wyznaczona w ramach niniejszego ćwiczenia.
Układ pomiarowy jak na rys. 22.3. Po zsynchronizowaniu maszyny z siecią zwiększa się, za pomocą autotransformatora, napięcie na jej zaciskach do około 1,1·Un. Przy tej wartości napięcia należy tak zwiększać prąd wzbudzenia, aby otrzymać prąd twornika równy prądowi znamionowemu przy P = 0. Jest to pierwszy punkt charakterystyki obciążenia. Następne punkty uzyskuje się zmniejszając stopniowo napięcie twornika i prądu wzbudzenia, tak aby prąd twornika pozostawał stały. Prąd wzbudzenia silnika należy tak regulować, aby moc czynna była równa zeru. Pomiary należy zakończyć, gdy U = 0,3·Un. Wyniki pomiarów zestawić w tabeli 22.2.
Rys. 22.6. Konstrukcja do wyznaczania reaktancji Potiera
Tabela 22.2
Lp. |
If |
U1 |
U2 |
U3 |
Uśr |
Uwagi |
|
A |
V |
V |
V |
V |
|
|
|
|
|
|
|
Ia = In cosϕ = 0ind f = fn |
Na podstawie pomiarów wykreślić charakterystykę obciążenia na wspólnym wykresie z charakterystyką biegu jałowego i charakterystyką zwarcia trójfazowego wyznaczonych w ramach ćwiczenia 21 (rys. 22.6). Punkty charakterystyki w zakresie napięć poniżej 0,3·Un leżą na prostej przechodzącej przez punkt A wyznaczony na podstawie charakterystyki zwarcia.
Duże znaczenie praktyczne przy analizie pracy maszyny synchronicznej ma reaktancja rozproszenia twornika. Pomiar tej reaktancji jest dość kłopotliwy, gdyż wymaga wyjęcia wirnika. Dlatego reaktancję tę często zastępuje się zbliżoną do niej reaktancją Potiera Xp, która w wielu przypadkach dostatecznie dokładnie ją zastępuje. Znalezienie wartości Xp polega na uprzednim wyznaczeniu tzw. trójkąta Potiera (rys. 22.6), którego przyprostokątna CB przedstawia stratę napięcia ΔU = In·Xp. Aby wyznaczyć punkt C, na lewo od punktu A' na prostej poziomej odkłada się odcinek A'0' = A0. Przez punkt 0' prowadzi się prostą l równoległą do prostoliniowej części ch.b.j. Prosta ta przecina ch.b.j. w punkcie C. Pionowy odcinek CB jest równy indukcyjnej stracie napięcie ΔU na reaktancji Potiera, a zatem
![]()
(22.3)
Znajomość charakterystyki biegu jałowego, zwarcia oraz reaktancji Potiera pozwala na wyznaczenie zmienności napięcia i znamionowego prądu wzbudzenia. Jest wiele metod wyznaczania tych parametrów. W ćwiczeniu będzie wykorzystana metoda uproszczonego wykresu amerykańskiego, który może być stosowany zarówno do maszyn cylindrycznych, jak i maszyn o biegunach jawnych. Ideę tego wykresu przedstawiono na rysunku 22.7.
Na osi rządnych zaznacza się wektor Un oraz pod kątem ϕn do niego wektor In. Do wektora Un dodaje się, prostopadle do kierunku wektora In, stratę napięcia na reaktancji Potiera ![]()
. Powstały w ten sposób wektor Ep, równy SEM odpowiadającej strumieniowi szczelinowemu maszyny, przenosi się łukiem na oś rzędnych. Następnie kreśląc linię poziomą, znajduje się przyrost prądu ΔIf, który kompensuje nasycenie obwodu magnetycznego. Do prądu Ifδ, odpowiadającemu napięciu znamionowemu przy nienasyconym obwodzie magnetycznym, dodaje się (z punktu A) równolegle do wektora In odpowiadający tej wartości prąd wzbudzenia z charakterystyki zwarcia Ifz. Powstały w ten sposób odcinek 0B reprezentuje prąd wzbudzenia prądnicy przy obciążeniu, lecz bez uwzględnienia nasycenia. Korektę ze względu na nasycenie obwodu magnetycznego wprowadza się dodając do odcinka 0B odcinek BC równy ΔIf. Odcinek 0C odkłada się za pomocą łuku na oś odciętych i otrzymuje się punkt C' odpowiadający szukanej wartości znamionowego prądu wzbudzenia Ifn.
W podobny sposób można wyznaczyć prąd wzbudzenia dla dowolnej wartości prądu obciążenia i współczynnika mocy. Na odcinku pionowym przechodzącym przez punkt C' znajduje się odcinek DF. Wskazuje on o ile wzrośnie napięcie twornika, jeśli prądnica pracująca przy znamionowym obciążeniu i stałym prądzie wzbudzenia zostanie odciążona. Ten wzrost napięcia, odniesiony do napięcia znamionowego, jest nazywany zmiennością napięcia Δu
![]()
(22.4)
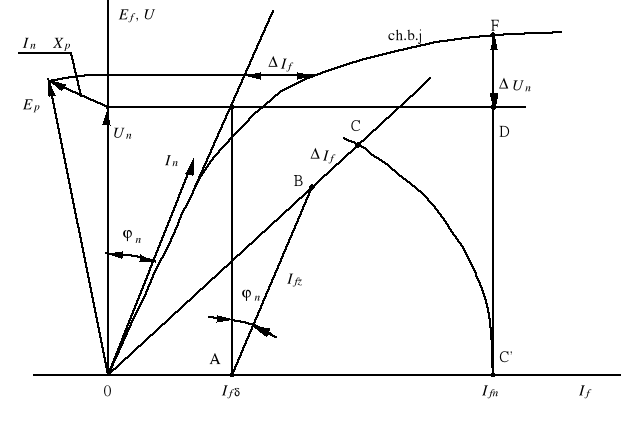
Rys. 22.7. Wyznaczanie zmienności napięcia i znamionowego prądu wzbudzenia metodą uproszczonego wykresu amerykańskiego
Sprawozdanie z ćwiczenia powinno zawierać:
77
Wyszukiwarka