ĆWICZENIE 33
WYZNACZENIE CHARAKTERYSTYK ELEKTROMECHANICZNYCH SILNIKA INDUKCYJNEGO METODĄ STRAT POSZCZEGÓLNYCH
Program ćwiczenia
Pomiar rezystancji uzwojeń.
Pomiar charakterystyk biegu jałowego i rozdział strat jałowych.
Wyznaczenie charakterystyk stanu zwarcia i obliczenie znamionowego prądu zwarcia.
Pomiar charakterystyki I = f(P1) przy obciążeniu bezpośrednim.
Obliczenie charakterystyk elektromechanicznych.
Cel pomiarów
Ćwiczenie ma na celu zapoznanie z metodą wyznaczania charakterystyk elektromechanicznych silników indukcyjnych bez konieczności używania do tego celu wyskalowanych urządzeń hamulcowych. Jest to metoda pośrednia, tzw. metoda strat poszczególnych.
Występujące w maszynach indukcyjnych straty mocy można podzielić na straty jałowe i straty obciążeniowe. Straty jałowe wyznacza się doświadczalnie podczas pracy silnikowej. Aby wyznaczyć straty obciążeniowe należy znać zależność między prądem pobieranym przez silnik a jego mocą. Ponieważ dla silników indukcyjnych zależności tej nie można wyznaczyć analitycznie, niezbędne jest przeprowadzenie pomiarów podczas obciążenia bezpośredniego. Obciążeniem silnika może być w tym przypadku dowolne urządzenie zapewniające jedynie możliwość regulacji mocy pobieranej z silnika; może to być np. maszyna robocza, do napędu której silnik jest używany. Przedstawiona metoda pozwala więc na wyznaczenie sprawności i charakterystyk elektromechanicznych silnika bezpośrednio na stanowisku pracy. Jest to istotna zaleta tej metody. Przeprowadzone w trakcie ćwiczenia pomiary stanu zwarcia badanego silnika pozwolą na określenie charakterystycznych parametrów silnika, między innymi krotności prądu rozruchowego i krotności momentu rozruchowego. Wyniki obliczeń charakterystyk elektromechanicznych umożliwiają porównanie parametrów badanej maszyny z podanymi przez wytwórcę na tabliczce znamionowej.
Omówienie programu ćwiczenia
Pomiar rezystancji uzwojeń
Pomiary podczas biegu jałowego
przy uzwojeniu połączonym w gwiazdę
przy uzwojeniu połączonym w trójkąt
Pomiary podczas stanu zwarcia
Pomiar podczas obciążenia bezpośredniego
przy połączeniu w gwiazdę
przy połączeniu w trójkąt
Obliczanie charakterystyk elektromechanicznych
Opracowanie wyników pomiarów
opracowane tabele pomiarowe i przykładowe obliczenia,
charakterystyki biegu jałowego: I0, P0, cosϕ0, Iμ, I0w = f(U0) przy f = fn,
rozdział strat jałowych,
charakterystyki zwarcia Iz, Pz, cosϕz = f(Uz) przy s = 1, f = fn,
obliczenie znamionowego prądu zwarcia,
obliczenie początkowego momentu rozruchowego silnika przy U = Un,
charakterystyki elektromechaniczne I, η, cosϕ, M, s, n = f(P2) przy U = Un, f = fn,
uwagi i wnioski.
Pytania kontrolne
Omówić metody wyznaczania charakterystyk elektromechanicznych maszyn elektrycznych.
Wyjaśnić, dlaczego ze wzrostem napięcia biegu jałowego wartość współczynnika mocy maleje.
Dlaczego prąd zwarcia zależy od ustawienia wirnika?
Jakie straty dominują podczas próby zwarcia?
W jakim celu wykonuje się próbę bezpośredniego obciążenia silnika.
Omówić straty występujące w silniku i sposób ich określenia.
Pomiar rezystancji uzwojeń należy przeprowadzić metodą techniczną, a otrzymane wyniki zestawić w tabeli 33.1.
Tabela 33.1
Lp. |
Faza U |
Faza V |
Faza W |
Rśr |
R*śr |
Uwagi |
||||||
|
U |
I |
RU |
U |
I |
RV |
U |
I |
RW |
|
|
|
|
V |
A |
Ω |
V |
A |
Ω |
V |
A |
Ω |
Ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W tabeli R* jest rezystancją fazy przeliczoną na umowną temperaturę pracy (rozdz. 2).
Jeżeli uzwojenie połączone jest na stałe w trójkąt lub punkt gwiazdowy nie jest wyprowadzony, rezystancje faz należy obliczyć według zależności (33.1).
Rezystancje faz uzwojenia połączonego w gwiazdę wynoszą
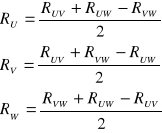
(33.1)
Jeżeli rezystancje między zaciskami są sobie równe
![]()
(33.2)
to rezystancja fazy jest określona zależnością
![]()
(33.3)
Dla uzwojenia połączonego w trójkąt rezystancje faz wynoszą
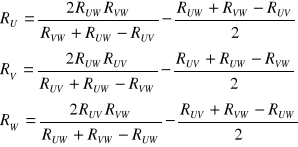
(33.4)
Jeżeli
![]()
(33.5)
to
![]()
(33.6)
Pomiary przeprowadzone podczas biegu jałowego silnika pozwalają m.in. na wyznaczenie strat mechanicznych oraz strat w żelazie silnika. Układ połączeń przedstawiono na rysunku 33.1. Nieobciążony silnik należy zasilić napięciem regulowanym zmniejszając jego wartość od U = 1,2·Un do takiej wartości, przy której prąd pobierany przez silnik zaczyna rosnąć (U ≈ 0,3·Un) lub jego prędkość obrotowa wyraźnie zmaleje. Otrzymane wyniki należy zestawić w tabeli 33.2.
Tabela 33.2.
Lp. |
U0śr |
I0śr |
P0 |
cosϕ0 |
ΔPobc0 |
ΔP0 |
U02 |
Iμ |
I0w |
Uwagi |
|||
|
|
|
PI |
PII |
P |
|
|
|
|
|
|
|
|
|
V |
A |
W |
- |
W |
V2 |
A |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
ΔPm = ΔPFen =
|
|
W tabeli 33.2
współczynnik mocy biegu jałowego
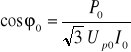
(33.7)
straty obciążeniowe biegu jałowego
![]()
(33.8)
![]()
![]()
(33.9)
straty jałowe
![]()
(33.10)
Straty jałowe w przybliżeniu są równe sumie strat mechanicznych i strat w stalowym rdzeniu
![]()
(33.11)
Rys. 33.1. Układ połączeń silnika indukcyjnego klatkowego do próby biegu jałowego, stanu zwarcia i obciążenia
Na podstawie przeprowadzonych pomiarów wykreśla się charakterystyki biegu jałowego, składowe bierną i czynną prądu I0 w funkcji napięcia oraz rozdziela straty na straty mechaniczne i straty w żelazie.
Przykładowe charakterystyki biegu jałowego, tj. zależności cosϕ0, I0, P0 = f(U0) przy f = fn oraz przebiegi Iμ, I0w = f(U0), przedstawiono na rysunku 33.2.
Rys. 33.2. Charakterystyki biegu jałowego silnika indukcyjnego
Prąd biegu jałowego I0 ma dwie składowe: składową bierną Iμ, (tzw. prąd magnesujący), której przebieg jest taki jak prądu magnesującego rdzenia ze szczeliną powietrzną, oraz składową czynną I0w. Składowe prądu biegu jałowego oblicza się z zależności
![]()
(33.12)
![]()
(33.13)
Składowa bierna Iμ ma przy małych napięciach przebieg prostoliniowy wynikający z istniejącej w silniku szczeliny powietrznej; przy wyższych napięciach (U > 0,6·Un) uwidacznia się nasycenie rdzenia magnetycznego. Od napięcia U ≈ 0,8·Un przebieg Iμ prawie pokrywa się z przebiegiem I0 = f(U0).
Składowa czynna I0w ma minimum przy pewnej wartości napięcia U0 = U01. Gwałtowny wzrost składowej I0w przy napięciu U < U01 wynika z faktu, iż przy małych wartościach napięcia większość strat P0 stanowią straty mechaniczne, niezależne od napięcia. Przy napięciu U > U01 decydującą rolę odgrywają straty mocy w rdzeniu, zwiększające się z kwadratem napięcia.
Przebieg prądu I0 wynika z przebiegu jego składowych Iμ i I0w. Ze wzrostem napięcia od U01 składowa bierna Iμ rośnie szybko a składowa czynna liniowo w funkcji napięcia. Stąd współczynnik mocy maleje ze wzrostem napięcia, nawet do cosϕ0n < 0,1 przy napięciu znamionowym.
Prędkość obrotowa w czasie pomiarów stanu jałowego praktycznie nie zmienia się, a więc straty mechaniczne silnika są stałe. Straty w rdzeniu są proporcjonalne do kwadratu napięcia. Krzywa P0 jest parabolą odcinającą na osi rzędnych wartość strat mechanicznych. Wyznaczenie strat mechanicznych przez przedłużenie krzywej strat jałowych do osi rzędnych (rys. 33.3) jest mało dokładne. Aby rozdzielić straty jałowe, należy wykreślić zależność P0 = f(U02) mającą w przybliżeniu przebieg prostoliniowy. Punkt przecięcia prostej P0 = f(U02) z osią rzędnych wyznacza wartość strat mechanicznych. Przy dużych nasyceniach obwodu magnetycznego straty w rdzeniu zależą od napięcia w potędze wyższej niż druga, stąd przebieg P0 = f(U02) dla wyższych napięć może zaginać się ku górze.
Rys. 33.3. Zależność strat jałowych od napięcia
Pomiary przeprowadzone podczas stanu zwarcia silnika pozwalają m.in. na obliczenie krotności prądu i momentu rozruchowego. Układ połączeń jest taki sam jak przy pomiarach stanu jałowego (rys. 33.1), ale wirnik badanej maszyny należy unieruchomić. Aby zmniejszyć wpływ nagrzewania się uzwojeń na otrzymane wyniki pomiary należy przeprowadzić możliwie szybko, zmniejszając natężenie prądu od I = 1,2·In do zera. Ponieważ wielkości zmierzone podczas zwarcia zależą od wzajemnego położenia wirnika i stojana (ze zmianą położenia zmienia się przewodność strefy zębowej), pomiary przy każdej wartości napięcia należy przeprowadzić przy trzech położeniach wirnika, przyjmując do wykreślenia charakterystyk i obliczeń wartości średnie. Wyniki pomiarów należy zestawić w tabeli 33.3.
Tabela 33.3
Lp. |
Uzśr |
I położenie wirnika |
II położenie wirnika |
III położenie wirnika |
Wartości średnie |
Uwagi |
||||||||
|
|
IIśr |
PI |
PII |
IIIśr |
PI |
PII |
IIIIśr |
PI |
PII |
Iz |
Pz |
cosϕz |
|
|
V |
A |
W |
A |
W |
A |
W |
A |
W |
- |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n = 0 |
Rys. 33.4. Charakterystyki stanu zwarcia silnika indukcyjnego
Na podstawie przeprowadzonych pomiarów należy wykreślić charakterystyki zwarcia, tj. zależności cosϕz, Iz, Pz = f(Uz) przy f = fn, s = 1, których przykładowe przebiegi przedstawiono na rysunku 33.4.
Przybliżoną wartość znamionowego prądu zwarcia (prądu rozruchowego przy U = Un) obliczyć należy z zależności
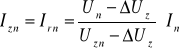
(33.14)
gdzie: Uzn - napięcie, przy którym prąd zwarcia jest równy prądowi znamionowemu zasilanego uzwojenia, natomiast ΔUz - wartość wynikająca z aproksymacji prostoliniowej części charakterystyki prądu zwarcia (rys. 33.4).
Paraboliczny przebieg Pz = f(Uz) (rys. 33.4) wynika z faktu, iż moc w stanie zwarcia jest tracona na rezystancjach uzwojeń stojana i wirnika. Napięcie zasilające, a więc i indukcja są małe, czyli pomijalne są straty w rdzeniu, a straty mechaniczne nie występują. Straty w uzwojeniach są proporcjonalne do kwadratu prądu a zatem, przy prawie liniowej zależności Iz = f(Uz), i do kwadratu napięcia.
Na podstawie pomiarów stanu zwarcia należy wyznaczyć krotność znamionowego prądu zwarcia
![]()
(33.15)
Znamionowa moc zwarcia, tj. moc zwarcia, gdy U = Un, wynosi
(33.16)
gdzie: Pz1 - moc zwarcia, gdy Iz = In.
Moment obrotowy w stanie zwarcia Mzn, gdy napięcie U = Un, oblicza się określając straty obciążeniowe w wirniku ΔP0b2, które dla znamionowego prądu zwarcia w przybliżeniu wynoszą
![]()
(33.17)
Straty obciążeniowe podstawowe stojana w stanie zwarcia, gdy uzwojenie jest połączone w gwiazdę, oblicza się z zależności
![]()
(33.18)
W stanie zwarcia straty w rdzeniu występują zarówno w stojanie jak i w wirniku, natomiast podczas biegu jałowego tylko w stojanie. Jednocześnie dla U = Un indukcja w stanie zwarcia jest równa w przybliżeniu połowie indukcji podczas biegu jałowego przy U = Un. Dlatego we wzorze 33.17 straty w rdzeniu ΔPFen wyznaczone z charakterystyki biegu jałowego dla U = Un są podzielone przez 2.
Moment obrotowy w stanie zwarcia przy U = Un oblicza się z zależności
![]()
(33.19)
Krotność momentu rozruchowego wynosi
![]()
(33.20)
Otrzymane wyniki należy zestawić w tabeli 33.4.
Tabela 33.4
Izn |
kI |
Pzn |
ΔPob1zn |
ΔPFen |
ΔPob2zn |
Mr |
kM |
A |
- |
W |
N·m |
- |
|||
|
|
|
|
|
|
|
|
Pomiary podczas obciążenia silnika wykonuje się w celu wyznaczenia zależności miedzy prądem dopływającym do silnika a mocą dostarczaną I = f(P1). Zależności tej nie można określić analitycznie ponieważ współczynnik mocy cosϕ zmienia się wraz ze zmianą obciążenia.
Silnik należy połączyć zgodnie z układem połączeń przedstawionym na rysunku 33.1. Obciążenie silnika zasilanego napięciem znamionowym U = Un należy zmniejszać od obciążenia, przy którym I = 1,2·In do biegu jałowego. Wyniki pomiarów prądu I, mocy pobieranej P1 oraz poślizgu s należy zestawić w tabeli 33.5.
Tabela 33.5
Lp. |
U |
I |
P1 |
s |
cosϕ |
ΔPob1 |
Uwagi |
||||||||||
|
UAB |
UBC |
UCA |
Uśr |
IA |
IB |
IC |
Iśr |
PI |
PII |
P |
t |
x |
s |
|
|
|
|
V |
A |
W |
- |
- |
W |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R1* = |
W tabeli 33.6
współczynnik mocy
![]()
(33.21)
straty obciążeniowe uzwojenia stojana wynoszą
![]()
(33.22)
![]()
(33.23)
Moc elektromagnetyczną pola wirującego określa zależność
![]()
(33.24)
w której przyjęto, ze całkowite straty w żelazie są równe stratom w żelazie stojana. Założenie to jest uzasadnione, ponieważ nawet przy obciążeniu znamionowym częstotliwość prądu wirnika (f2 = s·f1) jest mała, w związku z czym udział strat w żelazie wirnika jest pomijalnie mały w stosunku do całkowitych strat w żelazie. Należy przyjąć, że straty w żelazie ΔPFen oraz straty mechaniczne ΔPm nie zależą od obciążenia i określić je na podstawie pomiarów biegu jałowego dla napięcia U = Un.
Straty dodatkowe w uzwojeniu stojana ΔPd1 wynikające z nierównomiernego rozkładu gęstości prądu w przekroju przewodu określa się z zależności
(33.25)
Podczas normalnej pracy silnika indukcyjnego straty dodatkowe w wirniku, ze względu na bardzo małą częstotliwość jego prądów, praktycznie nie występują. Można więc przyjąć, że całkowite straty wirnika są równe stratom obciążeniowym wirnika. Straty obciążeniowe wirnika silnika pierścieniowego można obliczyć analogicznie do strat obciążeniowych stojana (zależność (33.22) lub (33.23)), natomiast straty obciążeniowe wirnika silnika klatkowego oblicza się z zależności
![]()
(33.33)
Moc użyteczna na wale silnika wynosi

(33.37)
Sprawność silnika określa zależność
![]()
(33.38)
Moment obrotowy na wale silnika oblicza się z zależności
![]()
(33.39)
gdzie: ω1 - prędkość kątowa wirującego pola magnetycznego.
Obliczenia należy przeprowadzić dla punktów pracy wyznaczonych przy obciążeniu bezpośrednia (p. 3.4), a wyniki obliczeń zestawić w tabeli 33.6.
Tabela 33.6
Lp. |
U |
I |
P1 |
s |
n |
ΔPob1 |
ΔPd1 |
Pel |
ΔPob2 |
P2 |
η |
M |
Uwagi |
|
V |
A |
W |
- |
obr/s |
W |
- |
N·m |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ΔPm = ΔPFem = R2* = |
Na podstawie otrzymanych wyników wykreśla się charakterystyki elektromechaniczne I, η, cosϕ, M, s, n = f(P2), których orientacyjny przebieg przedstawiono na rysunku 33.7.
Dla mocy P = Pn należy z charakterystyk wyznaczyć znamionowe wartości parametrów silnika i porównać je z podanymi przez wytwórcę na tabliczce znamionowej.
Sprawozdanie z ćwiczenia powinno zawierać:
Rys. 33.7. Charakterystyki elektromechaniczne silnika indukcyjnego
133
Wyszukiwarka