1. Wymień podstawowe typy oddziaływań i scharakteryzuj je.
- grawitacyjne: siłą grawitacyjna działa na wszystkie masy (jest siłą powszechną) i pochodzi od mas; ma długi zasięg i najmniejsze względne natężenie.
- elektromagnetyczne: siłą elektromagnetyczna działa na ładunki i prądy i jej źródłem są ładunki i prądy; ma długi zasięg. Siły między atomowe maja charakter elektromagnetyczny ponieważ atomy zawierają naładowane elektrony i protony, a oddziaływania elektromagnetyczne ma wielokrotnie większe natężenie od grawitacji. Większość sił z jakimi spotykamy się na co dzień np. tarcie, siłą sprężystości jest wynikiem oddziaływania atomów, są to wieć siły elektromagnetyczne.
- jądrowe; siłą utrzymująca w całości jadra atomowe pomimo odpychania miedzy protonami(ładunki dodatnie), ma bardzo krótki zasięg i największe względne natężenie.
- słabe: temu oddziaływaniu podlegają wszystkie cząstki elementarne, w szczególności oddziaływanie to odpowiada za rozpady cząsteczek elementarnych.
2 Zdefiniuj wektorowe parametry ruchu: prędkość chwilowa, przyspieszenie chwilowe?
Prędkość chwilowa. Jest pochodną drogi względem czasu V= dx/dt. Charakteryzuje prędkość w danej chwili, w danym punkcie toru i równa jest stosunkowi drogi do czasu, przy założeniu, ze czas ten zmierza do zera.
Przyśpieszenie chwilowe. Pierwsza pochodna prędkości względem czasu(w przypadku, gdy przyśpieszenie nie jest stałe i zmienia się z czasem, ograniczamy się do pomiaru zmian prędkości ΔV w bardzo którtkim czasie Δt).
3 Zrób wykresy: prędkości, przyśpieszenia, oraz drogi jako funkcji czasu, dla ruchu prosto. jedno. i jedno. przyś..
Jednostajny prostoliniowy
4. Określ parametry charakteryzujące ruch jednostajny po okręgu: prędkość kątowa, przyśpieszenie dośrodkowe, częstość kołowa, okres.
Prędkość kątowa: jest to wielkość charakteryzująca szybkość obrotu, czyli jest to stosunek kąta obrotu do czasu, w którym ten obrót nastąpił ω=Δά/Δt [ω] = 1rad/1s
Przyśpieszenie dośrodkowe: ma taki sam kierunek i zwrot jak wektor ΔV. Czyli jest skierowany do srodka okręgu.(w ruchu po dowolnej krzywej nazywane jest przyśpieszeniem normalnym- gdy jest prostopadłę do toru lub radialne- gdy jest skierowane wzdłuż promienia)
Przyśpieszenie normalne jest związane ze zmianą kierunku prędkości, a przyśpieszenie styczne ze zmianą jej wartości. a = V2 /R
Okres: jest to czas w jakim ciało pokonuje cały okrąg(całą długosć okręgu, zatacza kąt 360*)
T=2πr
Częstość kołowa: jest to częstotliwość z jaka ciało pokonuje całą długosć okręgu w jednostce czasu σ =1/T
5. zasady dynamiki Newtona
I. Pierwsza zasada dynamiki stwierdza, że jeżeli na ciało nie działa żadna siła (lub gdy siła wypadkowa jest równa zeru) to istnieje taki układ odniesienia, w którym to ciało spoczywa lub porusza się ruchem jednostajnym prostoliniowym. Taki układ nazywamy układem inercjalnym.
II. Tempo zmian pędu ciała jest równe sile wypadkowej działającej na to ciało. Dla ciała o stałej masie sprowadza się do iloczynu masy i przyśpieszenia ciała F=ma
III Gdy dwa ciała oddziałują wzajemnie, to siłą wywierana przez ciało drugie na ciało pierwsze jest równa i przeciwnie skierowana do siły, jaką ciało pierwsze działa na drugie
6. Podaj def. układu inercjalnego. Czy układ związany z ta sala egzaminacyjną jest układem inercjalnym?
Inercjalny układ odniesienia- wyróżniony układ odniesienia w którym spełniona jest zasada bezwładności(I zasada dynamiki).
„istnieje taki układ odniesienia, względem którego ciało spoczywa lub porusza się ruchem jednostajnym prostoliniowym, jeżeli na ciało to nic nie działa”. np układ związany z powierzchnią ziemi, może on służyć dla tych zjawisk, które trwają krótko w porównaniu z okresem obrotu ziemi dookoła osi. W układach inercjalnych rządzą dokładnie te same prawa. Układy inercjalne-spoczywają względem gwiazd stałych.
Sala egzaminacyjna- w przybliżeniu układ inercjalny, bo siły bezwładności i odśrodkowe można zaniedbać, bo są bardzo małe wieć jest to układ inercjalny.
7. Pasażer znajduje się w hamującym tramwaju.
W tym przypadku mamy do czynienia z nieinercjalnym układem odniesienia, występują w nich siły bezwładności, które nie pochodzą od innych ciał, a ich obserwowanie jest związane wyłącznie z wyborem nieinercjalnego układu odniesienia. Siły bezwładności nazywamy siłami pozornymi. Na pasażera działą siłą bezwładności, która jest skierowana przeciwnie do przyśpieszenia.
8. Wymien własności siły tarcia.
Siły tarcia. To kontaktowe siły wzajemnego oddziaływania pomiędzy ciałami, których wartość maksymalna zalezy od wzajemnego oddziaływania tych ciał, stopnia chropowatości ich powierzchni oraz składu chemicznego powierzchni. Leża one w płaszczyźnie powierchni styczne do powierzchni zetknięcia ciała. Jest to siła, która przeciwstawia się ruchowi.
Tarci statyczne. Siął tarcia działająca między nieruchomymi powierzchniami(odpowiada za wprawienie w ruch)
- jest w przybliżeniu niezależne od wielkości pola powierzchni styku ciała
- jest proporcjonalna do siły z jaką jedna powierchnia naciska na drógą. μs=Ts/Fn
Tarcie kinetyczne. Dla ciała w ruchu(przeciwstawia się ruchowi)
- nie zalerzy od prędkości względnej poruszania się powierzchni μk=Tk/Fn
μs>μk
Własności siły tarcia: jest to siłą wzajemnego oddziaływania między ciałami, przeciwstawia się ruchowi
9. podaj prawo powszechnego ciążenia.
Siła wzajemnego oddziaływania grawitacyjnego pomiędzy punktami materialnymi lub ciałami kulistymi o jednorodnym rozkładzie masy jest wprost proporcjonalna do iloczynu tych mas i odwrotnie proporcjonalna do kwadratu odległości między nimi. (wyjaśnia ono spadanie ciał na ziemię, ale też tłumaczy ruch planet) F=G (m1m2)/r2
10. różnica między masą a ciężarem.
Ciężar to siła Q=mg, masa to wielkość charakteryzująca masę ciała w kg
11.Podaj prawa Keplera
I. Każda planeta krąży po orbicie eliptycznej, ze słońcem w jednym z ognisk tej elipsy.
II. Linia łącząca Słońce i planetę zakreśla równe pola w równych odstępach czasu.
III. Sześciany półosi wielkich orbit dowolnych dwóch planet mają się do siebie jak kwadraty ich okresów obiegu (półoś wielka jest połową najdłuższej cięciwy elipsy).
12. podaj def. pracy oraz wzór….
Praca W wykonana przez siłę F jest iloczynem skalarnym tej siły F i wektora przesunięcia s
W=Fs. Aby obliczyć pracę wykonaną przez zmienna siłę trzeba albo umieć obliczyć całkę lub Iwiec obliczyć pole powierzchni pod krzywą co w większości przypadkach nie jest trudne.W=Fds
13. podaj wzór na energie kinetyczną w ruchu obrotowym i postępowym.
Energia kinetyczna- połowa iloczyny masy ciałą i kwadratu prędkości nazywamy energia kinetyczną ciałą o masie m. Ek=mv2/2, w ruchu obrotowym Ek=Iω2/2
14. Podaj i objaśnij twierdzenie o pracy i energii.
Praca wykonana przez siłę F działająca na ciało o masie m równa jest zmianie energi kinetycznej tego ciała. W= Ek-Ek0
15. Zdefiniuj moc średnią i chwilową.
Moc definiujemy jako ilość wykonanej pracy(lub przekazanej energi do czasu w jakim zostałą ona wykonana.
Średnia moc P=W/t, moc chwilowa dw/dt wat=1J/s,kilowat, kilowatogodzina
16. siły zachowawcze i nie zachowawcze
Siła zachowawcza: jest wtedy jeżeli wykonana praca przez tę siłę nad punktem materialnym który porusza się po dowolnej drodze zamkniętej jest równa zeru.np siłą grawitacji, siłą sprężysta.
Siłą niezachowawcza: jeżeli praca wykonana przez tę siłę nad punktem materialnym, który porusza się po dowolnej drodze zamkniętej nie jest równa zeru. Np. siłą oporu, siłą tarcia.
17.Jak można obliczyć tor ciała w rzucie ukośnym?. (łatwe) najważniejszy ostatni wzór
Składowe prędkości początkowej (zgodnie z rysunkiem) wynoszą odpowiednio
3,3
Stąd dla składowej x (poziomej) prędkości otrzymujemy (porównaj z tabelą (3.1)
Tabela 3.1
Równania skalarne opisujące ruch wzdłuż osi x |
Równania skalarne opisujące ruch wzdłuż osi y |
|
|
3,4
Ponieważ gx = 0 (przyspieszenie jest skierowane "w dół") więc
3,5
3,6
Ponieważ gy = -g (przyspieszenie jest skierowane "w dół") więc
3,7
Wartość wektora prędkości w dowolnej chwili wynosi
3,8
Teraz obliczamy położenie ciała w dowolnej chwili t. Ponownie korzystamy z równań z tabeli (3.1) i otrzymujemy odpowiednio
3,9
Wartość wektora położenia w dowolnej chwili obliczamy z zależności
3,10
Sprawdźmy teraz po jakim torze porusza się nasz obiekt tzn. znajdźmy równanie krzywej y(x). Równania (3.9) przedstawiają zależność x(t) oraz y(t). Równanie y(x) możemy więc obliczyć eliminując czas t z tych równań. Z zależności x(t) obliczamy t, a następnie wstawiamy do równania y(t), które przyjmuje postać
3,11
Otrzymaliśmy równanie paraboli (skierowanej ramionami w dół) i taki kształt ma tor ruchu y(x) pokazany na rysunku poniżej.
Rys. 3.3. Parabola rzutu ukośnego
18. Podaj wzory określające różne rodzaje energii potencjalnej.
Słowo „potencjalna” oznacza tu, że jest ona związana z położeniem i oddziaływaniem, czyli jest jakby energią statyczną, nie związaną z ruchem. Rodzajów energii potencjalnych jest kilka, a różnią się one typem oddziaływania, z którym są związane - oprócz energii potencjalnej ciężkości mamy jeszcze energię potencjalną sprężystości (związaną z oddziaływaniami sprężystymi)
Energia potencjalna ciężkości Ep=mgh. Energia potencjalna sprężystości Ep =1/2 kx2
Energia sprężystości zgromadzona w rozciągniętej sprężynie zależy od:
Wielkości rozciągnięcia (czyli przesunięcia końca sprężyny) - x oraz stałej sprężystości sprężyny - k, (czyli wielkości określającej jak dużej siły potrzeba, aby rozciągnąć sprężynę)
19. Sformułuj zasadę zachowania energii mechanicznej. Czy przy czołowym zderzeniu dwóch samochodów zasada ta nadal obowiązuje?
Zasada zachowania energii mechanicznej mówi, że dla ciała podlegającego działaniu siły zachowawczej, suma energii kinetycznej i potencjalnej jest stała.
Przy zderzeniu czołowym nie jest spełniona zasada zachowania energii, gdyż w układzie tym pojawiają się siły niezachowawcze np. tarcie oraz jest to zderzenie nie sprężyste.
20. Dlaczego wygodnie jest posługiwać się pojęciem środka masy do opisu ruchu układu punktów materialnych?
Środek masy układu punktów materialnych porusza się w taki sposób, jakby cała masa układu była skupiona w środku masy i jakby wszystkie siły zewnętrzne nań działały.
21. Jaki związek zachodzi między pędem a siłą?.
Siła zmienia pęd ciała. Wszystko odbywa się według wzoru: Δp=F*Δt Co można zinterpretować słownie jako: Zmiana pędu równa jest iloczynowi siły i czasu jej działania.
22. Sformułuj zasadę zachowania pędu.
Jeżeli na jakiś układ ciał nie działają siły (oddziaływania) zewnętrzne, wtedy układ ten ma stały pęd.
23. Jaka jest zasada działania silnika odrzutowego? ( Zastosuj zasady dynamiki Newtona.)
Silnik odrzutowy to silnik działający na zasadzie wyrzucania z dużą prędkością strumienia gazów, co zapewnia ciąg do przodu na podstawie trzeciego prawa dynamiki Newtona.
Przez odpowiednio ukształtowany wlot powietrze wpływa do silnika turbinowego dwuprzepływowego i zmniejsza w nim swoją prędkość zwiększając jednocześnie ciśnienie.
Wchodzące powietrze w przedniej części silnika dzielone jest na dwa strumienie. Jeden przepływa po zewnętrznej stronie komory spalania powodując chłodzenie silnika i obniżając poziom hałasu, a drugi trafia do sprężarek.
W sprężarkach strumień powietrza zostaje sprężony i przetłoczony do komory spalania, w której zostaje ogrzany. Powstałe w komorze gorące spaliny rozszerzają się częściowo w turbinie napędzając sprężarki, a częściowo w dyszy wylotowej którą opuszczają silnik łącząc się z pierwszym strumieniem. Wylatując z silnika z dużą prędkością strumienie wytwarzają ciąg (siłę odrzutu) powodujący ruch samolotu do przodu.
24. Jakie wielkości fizyczne są zachowane w zderzeniach sprężystych a jakie w niesprężystych?
* zderzenia sprężyste ( elastyczne) : Musi być spełniona zasada zachowania całkowitego pędu (występują tylko siły wewnętrzne oddziaływania między zderzającymi się obiektami, a siły zewnętrzne są równe zeru). W zderzeniu tym całkowita energia kinetyczna jest taka sama po zderzeniu jak przed zderzeniem, czyli obowiązuje również zasada całkowitej energii kinetycznej.
* zderzenia niesprężyste (nieelastyczne): Przy zderzeniach niesprężystych energia kinetyczna nie jest zachowana. Energia będąca różnicą pomiędzy początkową i końcową energią kinetyczną przechodzi w inne formy energii na przykład w ciepło lub energię potencjalną związaną z deformacją ciała podczas zderzenia. Całkowity pęd jest zachowany.
25. Zdefiniuj odpowiedniki w ruchu obrotowym następujących wielkości charakteryzujących ruch prostoliniowy ciała: prędkość, przyspieszenie, siła, masa , pęd.
26. Podaj definicję momentu siły i momentu pędu.
Moment siły ( moment obrotowy) τ.- wielkość, która w ruchu obrotowym odgrywa rolę analogiczną do siły. Jeżeli siła F jest przyłożona w pewnym punkcie to moment siły τ względem tego punktu jest definiowany jako:
gdzie wektor r reprezentuje położenie punktu względem wybranego inercjalnego układu odniesienia. Moment siły jest wielkością wektorową.
Moment pędu - wielkość, która w ruchu obrotowym odgrywa rolę analogiczną do pędu. Wielkość L nazywamy momentem pędu i definiujemy jako :
gdzie p jest pędem punktu materialnego, a r reprezentuje jego położenie względem wybranego inercjalnego układu odniesienia.
27. Podaj definicję momentu bezwładności dla układu punktów materialnych.
Momentem bezwładności układu mechanicznego względem nieruchomej osi nazywamy wielkość fizyczną równą sumie iloczynów mas wszystkich N punktów materialnych układu i kwadratów ich odległości od osi obrotu
gdzie mi jest masą i-tego punktu, a ri - jego odległością od osi. W przypadku ciała o ciągłym rozkładzie masy powyższa suma musi zostać zastąpiona całką
28. Czego dotyczy twierdzenie Steinera?
Twierdzenie Stainera podaje zależność pomiędzy momentem bezwładności I ciała względem danej osi, a momentem bezwładności Iśr.m. tego ciała względem osi przechodzącej przez jego środek masy i równoległej do danej
gdzie a jest odległością między osiami, a M jest masą ciała.
Twierdzenia tego bardzo często używa się do obliczania momentu bezwładności.
29. Sformułuj zasadę zachowania momentu pędu.
Zasada zachowania momentu pędu mówi, że dla dowolnego izolowanego układu punktów materialnych całkowita suma momentów pędu każdego punktu materialnego jest stała. Zasada ta również mówi, że prędkość zmiany momentu pędu układu jest równa sumie momentów sił zewnętrznych działających na punkty układu. Z zasady tej wynika np. dość wysoka prędkość kątowa obrotu gwiazdy neutronowej wokół własnej osi.
30. Jaki podstawowy warunek musi spełniać siła , aby ciało wykonywało ruch harmoniczny prosty?
Ciało porusza się ruchem harmonicznym prostym, jeżeli znajduje się tylko pod wpływem siły o wartości proporcjonalnej do wychylenia z położenia równowagi i skierowanej w stronę położenia równowagi ( Prawo Hooke'a ).
31. Podaj i objaśnij równanie ruchu harmonicznego.
Stała A (opisująca maksymalne wychylenie) jest amplitudą ruchu, wyrażenie ωt + φ nazywamy fazą drgań, a φ fazą początkową (stałą fazową). Stałe A i φ są wyznaczone przez warunki początkowe. Np. dla φ = π/2 otrzymujemy rozwiązanie
32. Jak można obliczyć okres wahań wahadła fizycznego?
Wahadłem fizycznym nazywamy ciało sztywne zawieszone tak, że może się wahać wokół pewnej osi przechodzącej przez to ciało. Ciało jest zawieszone w punkcie P, a punkt S, znajdujący się w odległości d od punkt P, jest środkiem masy ciała (rysunek 1).
Rys. 1 Wahadło fizyczne.
Moment siły τ działający na ciało wynosi
co w połączeniu ze wzorem τ = I dw/dt = I alfa daje
Dla małych wychyleń, dla których sinθ ≈θ dostajemy równanie
Otrzymaliśmy równanie, które ma postać równania ma = - kx dla ruchu harmonicznego przy czym θ odpowiada x. Możemy więc teraz napisać wyrażenie na częstość i okres drgań
|
|
|
|
33. Jaki jest wpływ siły tłumienie na drgania harmoniczne?
Tłumienie oscylatora polega na stratach energii układu oscylatora. W przypadku drgań mechanicznych siłą hamującą ruch cząstki są tak zwane opory ruchu. Przykładem może tu być opór powietrza. Siła oporu ma zwrot przeciwny do prędkości i w najprostszej postaci jest wprost proporcjonalna do prędkości. Energia drgań maleje z czasem do zera
34. Wyprowadź wzór na energie całkowitą w ruchu harmonicznym prostym.
Energia potencjalna sprężyny rozciągniętej o x wynosi
Jeżeli sprężyna zostanie rozciągnięta tak aby masa m znalazła się w chwili t = 0 w położeniu x = A, to energia potencjalna układu
jest zarazem energią całkowitą (energia kinetyczna Ek = 0). Jeżeli puścimy sprężynę to jej energia potencjalna będzie zamieniać się w energię kinetyczną masy m. Przy założeniu, że nie ma tarcia ani innych sił oporu, zgodnie z zasadą zachowania energii suma energii kinetycznej i potencjalnej musi się równać energii całkowitej w dowolnej chwili ruchu
Korzystając z wyraźeń na x(t) =A cos ω t oraz v(t) = -A ω sin ω t oraz pamiętając, że mω2 = k otrzymujemy
35. Jak porusza się punkt uczestniczący w dwóch prostopadłych drganiach harmonicznych?
Rozpatrzmy teraz złożenie dwu drgań harmonicznych zachodzących na płaszczyźnie wzdłuż kierunków prostopadłych względem siebie
Punkt materialny wykonujący drgania złożone porusza się po krzywej leżącej na płaszczyźnie xy, a jego położenie jest dane w dowolnej chwili równaniem (1). Przykładowe krzywe odpowiadające drganiom o jednakowych częstościach ω1 = ω2, dla różnych wartości amplitud A1 i A2 oraz różnych wartości przesunięcia fazowego φ są pokazane na rysunku poniżej.
Rys. 1. Złożenie drgań prostopadłych o jednakowych częstościach
Złożenie drgań prostopadłych o różnych częstościach daje w wyniku bardziej skomplikowany ruch. Na rysunku 2 pokazane są przykładowe krzywe (tak zwane krzywe Lissajous) będące wynikiem złożenia takich drgań. Sytuacja pokazana na tym rysunku odpowiada składaniu drgań o jednakowych amplitudach.
Rys. 2 Złożenie drgań prostopadłych o różnych częstościach i jednakowych amplitudach
36. Wykonaj wykresy pokazujące położenie prędkość i przyśpieszenie ciała w ruchu harmonicznym.
Równania:
x(t) = A cos w t ,
V(t) = dx/dt = -A w sin wt ,
a(t) = dv/dt =d2x/d2t = -A w2 cos wt
opisują kolejno położenie, prędkość i przyspieszenie w funkcji czasu. Zależności te są pokazane na rysunku 1.
Rys. 1. Wykres zależności x(t), v(t), a(t) dla prostego ruchu harmonicznego
37. Narysuj zależność amplitudy drgań od częstotliwości siły wymuszającej. Dla jakiej częstotliwości wystąpi rezonans?
Drgania (wymuszone) odbywają się z częstością siły zewnętrznej, a nie z częstością własną.
Suma (złożenie) dwóch funkcji okresowych daje w wyniku też funkcję okresową (rysunek 1).
Rys. 1. Złożenie dwóch funkcji okresowych
Chociaż drgania odbywają się z częstością ω siły wymuszającej to amplituda i faza zależą od relacji pomiędzy częstością wymuszającą ω, a częstością własną ω0. W szczególności gdy częstość siły wymuszającej osiągnie odpowiednią częstotliwość, to amplituda drgań może wzrosnąć gwałtownie nawet przy niewielkiej wartości siły wymuszającej. To zjawisko nazywamy rezonansem
38. Wymień i opisz rodzaje fal mechanicznych podając odpowiednie przykłady.
Rodzaje fal
Ze względu na kierunek drgań cząstek ośrodka względem kierunku rozchodzenia się fale dzielimy na fale podłużne i fale poprzeczne.
Fala jest podłużna gdy kierunek drgań cząstek ośrodka jest równoległy do kierunku rozchodzenia się fali i zarazem kierunku transportu energii (rysunek 1). Przykładem są tu fale dźwiękowe w powietrzu czy też drgania naprzemiennie ściskanej i rozciąganej sprężyny.
|
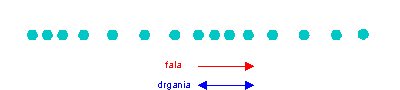
Rys. 1. Fala podłużna
Fala jest poprzeczna gdy kierunek drgań cząstek ośrodka jest prostopadły do kierunku rozchodzenia się fali i zarazem kierunku transportu energii (rysunek 2). Przykładem mogą tu być drgania naprężonego sznura, którego końcem poruszamy cyklicznie w górę i w dół.
.
|
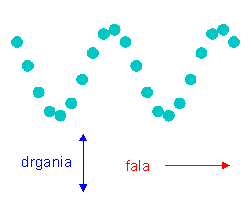
Rys. 2. Fala poprzeczna
Możemy również dokonać podziału ze względu na rodzaj zaburzenia. Ważnymi przykładami są impuls falowy i fala harmoniczna.
Impuls falowy powstaje gdy źródłem jest jednorazowe zaburzenie w ośrodku: na przykład gdy wrzucimy kamień do wody lub gdy jednorazowo odchylimy w bok koniec napiętej liny (rysunek 3).
|
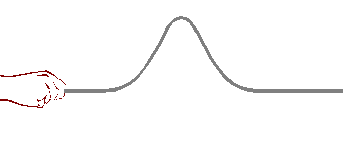
Rys. 3. Impuls falowy
Fala harmoniczna powstaje gdy źródło wykonuje drgania harmoniczne: na przykład gdy cyklicznie wychylamy koniec napiętej liny (rysunek 4).
|
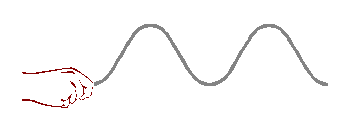
Rys. 4. Fala harmoniczna
Ze względu na kształt powierzchni falowej możemy wyróżnić fale płaskie i fale kuliste.
W przypadku fal płaskich zaburzenie rozchodzi się w jednym kierunku, a powierzchnie falowe są płaszczyznami prostopadłymi do kierunku ruchu fali tak jak na rysunku 5 poniżej.
Rys. 5. Powierzchnie falowe (płaszczyzny) i promienie fali płaskiej
Dla fal kulistych zaburzenie rozchodzi się ze źródła we wszystkich kierunkach, a powierzchnie falowe są sferami jak na rysunku 6 poniżej.
Rys. 6. Fala kulista rozchodząca się ze źródła Z; wycinki powłok sferycznych przedstawiają powierzchnie falowe
39. Def pojęcia liczba falowa, częstość kołowa, prędkość falowa
Częstość kołowa - wielkość określająca, jak szybko powtarza się zjawisko okresowe. ω=2πF
Równanie poprzecznej fali harmonicznej
y=Asin2π/λ(x-Vt), y=Asin2π(x/λ-t/T)
po podstawieniu [y=Asin(kx-ωt]
Prędkość fali V=λ/T=ω/k
40. Podaj i omów równanie fali biegnącej.
y=f(x-Vt) równanie fali biegnącej w prawo
41.xxx
42. Czego dotyczy twierdzenie Fouriera? Na czym polega analiza fal złożonych?
Dowolne drganie okresowe o okresie T możemy przedstawić jako kombinację liniową (sumę) drgań harmonicznych o okresach danych wzorem Tn=T/n, gdzie n jest liczbą naturalną np. na strunie mogą powstać fale stojące o różnej długości. Najniższą częstotliwość nazywamy częstotliwością podstawową, a pozostałe wyższymi harmonicznymi. Zazwyczaj w drganiach występują oprócz drgania podstawowego, drgania harmoniczne, a dźwięki jakie odbieramy są wynikiem nakładania się tych fal.
43.Na czym polega zjawisko Dopplera?
Polega na pozornej zmianie częstotliwości fali z powodu ruchu obserwatora lub źrudłą fali.
Ogólnie f'=f(V-+V0/V-+Vz)
Źródło porusza się a obserwator spoczywa f'=f V/V-Vz
Źródło spoczywa, obserwator się porusza f'=f V-V0/V
F'- częstotliwość fali jaka odbiera obserwator
F - częstotliwość fali emitowanej przez źródło
V0 - prędkość fali w osrodku
Vz- prędkość źródła
44.oblicz wynik interferencji dwóch identycznych fal
Interferencja fali polega na nakładaniu się fal, prowadzi do ich wzmocnienia, stabilnego w czasie lub osłabienia w zależności od różnicy faz spotykających się fal.
Fale stojąca jest szczególnym przypadkiem interferencji- powstaje w wyniku nałozenia się dwóch biegnących w przeciwną strone fal o takiej samej amplitudzie i częstotliwości. Z taka sytuacją mamy do czynienia gdy fala rozchodząca się w danym ośrodku odbija się od granicy ośrodka i nakłąda się na fale padajacą y1=Asin(kx-wt), y2=Asin(kx+wt) = y=2Asinkxcoswt
Energia w fali stojacej jest na stałe zmagazynowana w poszczególnych elementach ośrodka.
45. Objaśnij zjawisko zwane dudnieniem dla fal akustycznych
Dudnienie powstaje gdy nakładają się fale o zbliżonych częstotliwościach. Nazwa dudnienie wynika z faktu iż natężenie fali, a więc stopień jej słyszalności zależy właśnie od amplitudy.
46. zdefiniuj ciśnienie
Jest to stosunek siły parcia działającej na jednostkę powierchni do wielkości tej powierchni
P=F/s, jednostka cisnienia [Pa] 1N/m2 1atm=101325pa, 1bar=105Pa
47. Prawo Pascala
Ciśnienie zewnętrzne wywierane na zamknięty płyn jest przekazywane niezmienione na każdą część płynu oraz na ścianki naczynia.
Prawo Archimedesa
Ciało w całości lub częściowo zanurzone w płynie jest wypierane ku górze siłą równą ciężarowi wypartego przez to ciało płynu
gdzie mp jest masą płynu, a ρ jego gęstością. Natomiast V jest objętością części zanurzonej ciała.
48. Jakie ciśnienie panuje w cieczy o danej gęstości w punkcie na głębokości H?
Rozpatrzmy teraz ciecz w naczyniu zamkniętym tłokiem, na który możemy działać zmiennym ciśnieniem zewnętrznym p0. W każdym punkcie cieczy znajdującym się na głębokości h, ciśnienie jest dane wyrażeniem p = po + ρ gh.
49. Wyprowadź równanie ciągłości.
Równanie ciągłości: (S - pole przekroju strugi)
W czasie Δt cząstka płynu przebywa odległość równą vΔt. Masa płynu przechodzącego przez S1 w czasie Δt wynosi Δm1=ρS1V1Δt gdzie S1v1Δt stanowi objętość elementu płynu. Analogicznie masa płynu przepływającego przez powierzchnię S2 w czasie Δt jest równa Δm2=ρS2V2Δt
Ponieważ płyn jest nieściśliwy więc jego gęstość jest taka sama w punkcie P1 i P2. Ponadto między tymi punktami płyn nie może opuścić strugi więc strumienie mas przepływające przez obie powierzchnie muszą być sobie równe. Zatem
S1V1 = S2V2 lub SV=cons.
50. Prawo Bernoulliego:
p+ρV2/2+ρgh=const.
Równanie Bernoulliego dla przepływu ustalonego, nielekkiego, nieściśliwego płynu. Równanie to wyraża fakt, że z przepływem płynu związane jest (oprócz ciśnienia statycznego) ciśnienie dynamiczne ρV2/2. wynika z niego, ze przepływ cieczy w strudze może być wywołany różnicą poziomów tych końców.
51. Prawo Coulomba: Każde dwa ładunki punktowe q1 i q2 oddziaływają wzajemnie siłą wprost proporcjonalną do iloczynu tych ładunków, a odwrotnie proporcjonalną do kwadratu odległości między nimi
gdzie stała
. Współczynnik ε0 = 8.854·10-12 C2/(Nm2) nosi nazwę przenikalności elektrycznej próżni
52) Prawo Gaussa
Całkowity strumień pola elektrycznego przez zamkniętą powierzchnię jest więc równy całkowitemu ładunkowi otoczonemu przez tę powierzchnię podzielonemu przez ε0. Analogiczne rozumowanie można przeprowadzić dla dowolnej liczby ładunków wewnątrz dowolnej zamkniętej powierzchni.
gdzie pole E jest wytwarzane przez Q. Kółko na znaku całki oznacza, że powierzchnia całkowania jest zamknięta.
53. jakie jest rozkład ładunków w naładowanym przewodniku?
W przewodnikach ładunki mogą się swobodnie poruszać. Jeśli w przewodniku rozmieścimy ładunek w sposób przypadkowy to będzie on wytwarzał pole elektryczne przemieszczające swobodne elektrony na powierzchnię przewodnika dopóty, dopóki nie zniknie pole wewnątrz przewodnika. Wewnątrz przewodnika w dowolnym punkcie powierzchni S pole musi być równe zeru. Cały ładunek gromadzi się na powierzchni przewodnika.
54. Podaj związek między pracą i potencjałem oraz napięciem pola elektrostatycznego?
Potencjał pola elektrycznego to wielkość skalarna charakteryzująca pole elektryczne pod względemzdolności do wykonywania pracy - jest to energia potencjalna przypadająca na jednostkę ładunku umieszczonego w danym punkcie pola. V=Ep/q, różnica potenciałó czyli napięcie. Va-Vb=U= -Wab/q
55. czy pole elektrostatyczne jest polem potencjalnym?.
Pole elektrostatyczne jest polem potencjalnym(zachowawczym). Praca w polu elektrycznym dowolnym nie zależy od kształtu i długosci toru - zależy jedynie od potencjałów: początkowego i końcowego punktu toru(zachowuje wartość pracy niezależnie od toru)
56. Podaj wyrażenie na pracę wykonaną przy przesuwaniu ładunku punktowego w polu elektrostatycznym z punktu A do punktu B.
Wab=kQq(1/rb-1/Ra), Wab=Epb - Epa, Praca po krzywej zamkniętej równa jest ZERO.
57.Korzystajać z prawa Gausa wyprowadź wzór na natężenie pola elektrycznego na zewnątrz kuli, wewnątrz.
Wew. E=Qwew./r2 ,Qwew.=Q 4/3πr3/4/3πR3 E=k Q/R3 r
Zew. Ewew=0, E=kQ/r2
58. Co to jest potencjał elektryczny? Jaką własność posiada powierzchnia przewodnika.
Potencjałem elektrycznym w pkt A pole elektrycznego nazywamy stosunek pracy wykonanej podczas przemieszczania ład. „próbnego” q z pkt A do pkt położonego w nieskończoności do ładunku „próbnego” q, czyli
VA=ΔWA→∞/q
Wypadkowy ładunek wewnątrz przewodnika jest równy zeru; cały ładunek gromadzi się na powierzchni przewodnika.
59. Zdefiniuj pojemność elektryczną. Od czego zależy pojemność.
Kondensatory tworzą dwa przewodniki zwane okładzinami lub elektrodami, rozdzielone dielektrykiem.
Jeżeli do okładzin kondensatora doprowadzimy napięcie elektryczne U, to na okładzinach zacznie zbierać się ładunek elektryczny Q, przy czym na jednej okładzinie zgromadzi się ładunek +, a na drugiej -. Ładunek zgromadzony na jednej z okładzin, nazywamy ładunkiem kondensatora.
Doświadczalnie stwierdzono, że miedzy napięciem doprowadzonym a ładunkiem kondensatora istnieje związek, a mianowicie ładunek jest wprost proporcjonalny do napięcia, czyli:
Q=CU ,gdzie C nazywamy pojemnością kondensatora
Pojemnością kondensatora nazywamy więc stosunek ładunku kondensatora do napięcia występującego pomiędzy jego okładzinami, czyli
C=Q/U
Jednostką pojemności jest farad [1F]
Pojemność jest własnością kondensatora określającą jego zdolność do gromadzenia ładunku elektrycznego.
Pojemność kondensatora płaskiego zależy od jego wymiarów oraz własności dielektryka. Im większa jest powierzchnia okładzin i przenikalność elektryczna względna dielektryka oraz im mniejszy jest odstęp miedzy okładzinami, tym większa jest pojemność kondensatora.
C=εS/d
Gzie
ε=ε0εr
ε0=1/4Π*9*109=8,85*10-12 F/m - stała elektryczna zwana też przenikalnością elektryczną próżni.
εr - przenikalność elektryczna względna, określa ile razy przenikalność danego środowiska jest większa od przenikalności próżni.
60. Jaki wpływ na pojenosć kondensatora umieszczenie miedzy jego okładkami dielektryka?
Umieszczenie dielektryka między okładkami spowoduje zwiększenie jego pojemności Er razy.Gdy dielektryk umieścimy w polu elektryczny to pojawiają się indukowane ładunki powierzchniowe, które wytwarzają pole elektryczne przeciwne do zewnętrznego pola elektrycznego.
61. Ile wynosi energia zgromadzona w polu elektrycznym?
Jeżeli w jakimś punkcie przestrzeni istnieje pole elektryczne o natężeniu E to możemy uważać, że w tym punkcie jest zmagazynowana energia w ilości ½ε0E2 na jednostkę objętości.?
62def..
Gęstością prądu elektrycznego nazywamy stosunek prądu I do przekroju poprzecznego S przewodnika. Gęstość prądu oznaczamy przez J. Zgodnie z definicją: J=I/S
Jednostką gęstości prądu jest 1 amper na metr kwadratowy [1 A/m2]. Ponieważ w praktycze przekrój jest podawany przeważnie w mm2 , zatem często moerzymy gęstość prądu w A/mm2.
Rezystancja (opór elektryczny) - jest wielkością stałą i wyraża się stosunkiem napięcia na rezystorze do wartości przepływającego przezeń prądu R=U/I
Natężenie prądu - prądem elektrycznym nazywamy stosunek elementarnego ładunku elektrycznego Δq przenoszonego przez cząsteczki naładowane w ciągu pewnego czasu elementarnego Δt przez dany przekrój poprzeczny środowiska, do tego czasu, czyli i=Δq/Δt
a jego wartość nazywamy natężeniem prądu elektrycznego.
63. prawo Ohma
Prawo Ohma mówi, że natężenie prądu stałego I jest proporcjonalne do całkowitej siły elektromotorycznej w obwodzie zamkniętym lub do różnicy potencjałów (napięcia elektrycznego) między końcami części obwodu nie zawierającej źródeł siły elektromotorycznej.
U=RI
R=U/I
I=U/R
Prawo Ohma możemy stosować tylko w przy prądzie stałym (dla prądu zmiennego można stosować prawo Ohma dla wartości chwilowych lub w postaci zespolonej) oraz dla stałej temperatury w której znajduje się przewodnik (jeżeli temperatura jest zmienna wówczas stosujemy tzw. II prawo Ohma
64. Co to jest siłą elektromotoryczna
Siła elektromotoryczna źródła (napięcie źródłowe) prądu to różnica potencjałów między zaciskami źródła napięcia (prądu), w warunkach gdy źródło to nie dostarcza energii elektrycznej. Oznaczmy przez literę E. Biegunowość źródła oznaczamy za pomocą strzałki wskazującej biegun +, w źródłach elektrochemicznych kreska dłuższa oznacza biegun +, a krótsza -
65.Prawa Kirhofa
I prawo Kirchhoffa: dla każdego węzła obwodu elektrycznego, suma algebraiczna prądów jest równa zeru.
II prawo Kirchhoffa: w dowolnym oczku obwodu elektrycznego prądu stałego suma algebraiczna napięć źródłowych jest równa sumie algebraicznej napięć odbiornikowych.
Prawa te stosujemy tylko dla obwodów prądu stałego. Dla obwodów prądu zmiennego stosuje się prawo Kirchhoffa dla wartości chwilowych lub prawo Kirchhoffa w postaci zespolonej. Istnieją również magnetyczne prawa Kirchhoffa.
66. omów siłę Lorentza. Po jakim torze porusza się naładowana cząstka w polu magnetycznym?
Jest to siła działająca na ładunek poruszający się w polu magnetycznym z prędkością V.
67.def. wektor indukcji magnetycznej.
w fizyce wielkość wektorowa opisująca pole magnetyczne. Wektor ten określa siłę Lorentza, z jaką pole magnetyczne działa na poruszający się w nim ładunek elektryczny : Jednostką indukcji B jest tesla; (T); 1 T = 1 N/A*m = 1 V*s/m2=1 Wb/m2 (Weber [Wb] jest jednostką strumienia magnetycznego)
68.Omów efekt Halla i jego zastosowanie.
Załóżmy, że przez płytkę wykonaną z metalu lub półprzewodnika przepływa w kierunku osi x prąd elektryczny i. Płytkę umieszczamy w jednorodnym polu o indukcji B, skierowanej wzdłuż osi z. Wówczas na poruszające się w płytce elektrony działa siła F, skierowana wzdłuż osi y w kierunku wartości ujemnych. Siła ta powoduje gromadzenie się elektronów w dolnej części płytki przewodzącej. Powstaje nierównomierny rozkład ładunków w płytce, a więc powstaje poprzeczne pole elektryczne E skierowane, podobnie jak siła F, wzdłuż osi y w kierunki wartości ujemnych. Nazywamy to zjawiskiem Halla.
Z natężeniem pola E wiążę się napięcie UH, zwane napięciem Halla, które występuje na płytce. Wartość tego napięcia zależy od wartości indukcji B pola magnetycznego. Na tej zależności oparta jest konstrukcja przyrządu zwanego hallotronem , służącego do pomiaru indukcji B lub natężenia pola magnetycznego H.
69. Prawo Ampera.
Krążenie wektora indukcji po dowolnej krzywej zamkniętej jest proporcjonalne do sumy natężeń prądów zawartych wewnątrz tej krzywej.
71.Omów działanie dwóch nieskończenie długich przewodników…
Przewodnik 1 wytwarza w swoim otoczeniu w odległości R pole magnetyczne. W tym polu znajduje się przewodnik 2 w którym płynie prąd I 2.
Dwa równoległe przewodniki z prądem oddziaływają na siebie za pośrednictwem pola magnetycznego. Przewodniki, w których prądy płyną w tych samych kierunkach przyciągają się, a te w których prądy mają kierunki przeciwne odpychają się.
72. Podaj i objaśnij prawo biota-sawarta
Biota-Savarta prawo, prawo określające natężenie pola magnetycznego H powstającego w punkcie O o współrzędnych (x0,y0,z0) w wyniku przepływu prądu elektrycznego o gęstości j(x,y,z): H(x0,y0,z0) = k∫(R-3)j(x,y,z)×R dxdydz gdzie całkowanie odbywa się po całym obszarze przepływu prądu. R jest różnicą wektorów wodzących dla punktu O i bieżącego punktu (x,y,z), R =|R|, stała k zależy od wyboru układu jednostek, w układzie SI k= (4π)-1.Dla prostego przypadku nieskończenie cienkiego przewodu prawo Biota-Savarta można wyrazić wzorem: H=kI∫(R-3)(dl×R), gdzie R, H, R, k zdefiniowane jak powyżej, dl - nieskończenie mały wektor styczny w danym miejscu do przewodu, I - natężenie prądu, całkowanie wykonuje się wzdłuż przewodu.
73.Omów oddziaływanie pola magnetycznego na ramkę z prądem.. co nazywamy magnetycznym momentem dipolowym?
Jeżeli ramkę przyłączymy do źródła prądu stałego, na dwa jej boki znajdujące się w polu magnetycznym magnesu, będą działały siły elektrodynamiczne powodujące obrót ramki wokół osi obrotu. Siły te tworzą parę sił o momencie
M. = F · r
gdzie:
r - ramię siły, czyli odległość między kierunkiem siły a osią obrotu.
W miarę zmiany położenia ramki moment siły staje się coraz mniejszy (maleje ramię siły) i zmniejsza się prędkość ramki. Gdy ramka przyjmie położenie prostopadłe do linii sił pola moment siły będzie równy zeru. Ramka w tym położeniu ma niewielką prędkość, al. Dzięki bezwładności minie je i właśnie w tym momencie kierunek prądu w ramce musi się zmienić. Wówczas pojawi się znowu moment siły obracający ramkę w tym samym kierunku.
Magnetyczny moment dipolowy obwodu to iloczyn natężenia prądu płynącego w tym obwodzie oraz pola powierzchni jaką obejmuje ten obwód
Siły magnetyczne, działające na przewód wytwarzają moment siły, który powoduje obrót ramki.
74. Indukcja elektromagnetyczna?
Zjawisko polega na powstawaniu siły elektromotorycznej SEM w obwodzie podczas przemieszczania się względem siebie źródła pola magnetycznego i tego obwodu. Mówimy, że w obwodzie jest indukowana siła elektromotoryczna indukcji (SEM indukcji). W obwodzie zamkniętym SEM indukcji wywołuje przepływ prądu indukcyjnego i w konsekwencji powstanie wytwarzanego przez ten prąd indukowanego pola magnetycznego. Odkryte w 1831 roku przez angielskiego fizyka Michaela Faradaya.
Zjawisko indukcji opisuje prawo indukcji elektromagnetycznej Faradaya:
gdzie:
to indukowana siła elektromotoryczna w woltach
ΦB to strumień indukcji magnetycznej przebiegajacy przez powierzchnię objętą przewodnikiem
Do określania kierunku indukowanego prądu, wskutek indukcji elektromagnetycznej używane jest Prawo Lenza, zwane prawem przekory mówiące że:
„Prąd indukowany ma taki kierunek, że wytwarzany przez niego własny strumień magnetyczny przeciwdziała pierwotnym zmianom strumienia, które go wywołały.”
75.Regułą Lenza
Prąd indukowany ma taki kierunek, że wytwarzany przez niego własny strumień magnetyczny przeciwdziała pierwotnym zmianom strumienia, które go wywołały
Przykłady wnioskowań z reguły Lenza:
Jeżeli zamknięta zwojnica porusza się względem magnesu to, wokół zwojnicy powstaje takie pole magnetyczne, które przeciwdziała temu ruchowi.
Jeżeli cząstka obdarzona ładunkiem elektrycznym porusza się w polu magnetycznym o wzrastajacym natężeniu, to ruch tej cząstki wywołuje wzrost natężenia pola magnetycznego przed cząstką a osłabienie za cząstką (przeciwdziała zmianie pola w miejscu gdzie jest cząstka), a przy ruchu w polu słabnącym odwrotnie. Patrz deformacja pola magnetycznego Ziemi przez wiatr słoneczny.
Jeżeli cząstka obdarzona ładunkiem porusza się wzdłuż zakrzywionej linii pola magnetycznego, to "prostuje" tę linię.
76. Zjawisko samoindukcji.
Samoindukcja (indukcja własna) jest zjawiskiem elektromagnetycznym, szczególnym przypadkiem zjawiska indukcji elektromagnetycznej. Samoindukcja występuje, gdy siła elektromotoryczna wytwarzana jest w tym samym obwodzie, w którym płynie prąd powodujący indukcję, powstająca siła elektromotoryczna przeciwstawia się zmianom natężenia prądu elektrycznego. Zjawisko samoindukcji opisuje wzór:
gdzie:
to indukowana siła elektromotoryczna w woltach,
L - Indukcyjność cewki lub elementu obwodu elektrycznego,
i - natężenie prądu w amperach,
t - czas w sekundach
Indukcyjność to właściwość cewki (induktor, zwojnica) polegająca na samoindukcji; zmienne pole magnetyczne płynące przez cewkę indukuje w niej SEM zgodnie z prawem Faradaya. Jednostką indukcyjności jest henr (1 H = 1 kg·m2·s-2·A-2 ), a symbolem L.
77. ile wynosi energia zgromadzona w polu magnetycznym?
Jeżeli w jakimś punkcie przestrzeni istnieje pole magnetyczne o indukcji B to możemy uważać, że w tym punkcie jest zmagazynowana energia w ilości B2/2μ0 na jednostkę objętości
78. Prawo Gaussa „Całkowity strumień magnetyczny przechodzący przez powierzchnię zamkniętą równa się zeru. Fakt ten wynika stąd, iż pole magnetyczne jest bezźródłowe - nie istnieją w świecie ładunki magnetyczne, a linie wektora indukcji nie mają początku ani końca. Zgodnie z twierdzeniem Gaussa-Ostrogardskiego dywergencja pola jest wszędzie równa zero.”
79. Porównaj pole elektrostatyczne z magnetycznym
Magnetyczne |
Elektrostatyczne |
Gdzie:
|
|
- zdefiniowane przez siłę - Zmienne w czasie pole magnetyczne wytwarza wirowe pole elektryczne - Zmienne pole elektryczne powoduje powstawanie pola magnetycznego -Są składnikami pola elektromagnetycznego |
|
80. Drgania w obwodzie LC
![]()
Rozpatrzmy obwód złożony z szeregowo połączonych indukcyjności L (cewki) i pojemności C (kondensatora) pokazany na rysunku. Przyjmijmy, że opór elektryczny (omowy) obwodu jest równy zeru (R = 0). Załóżmy też, że w chwili początkowej na kondensatorze C jest nagromadzony ładunek Q0, a prąd w obwodzie nie płynie (rysunek a).
W takiej sytuacji energia zawarta w kondensatorze jest maksymalna, a energia w cewce
![]()
jest równa zeru.
Oscylacje w obwodzie LC
Następnie kondensator zaczyna rozładowywać się (rysunek b). W obwodzie płynie prąd I = dQ/dt. W miarę jak maleje ładunek na kondensatorze maleje też energia zawarta w polu elektrycznym kondensatora, a rośnie energia pola magnetycznego, które pojawia się w cewce w miarę narastania w niej prądu. Wreszcie gdy ładunek spadnie do zera cała energia jest przekazana do pola magnetycznego cewki (rysunek c). Jednak pomimo, że kondensator jest całkowicie rozładowany prąd dalej płynie w obwodzie (w tym samym kierunku). Jego źródłem jest SEM samoindukcji powstająca w cewce, która podtrzymuje słabnący prąd.Ten prąd ładuje kondensator (przeciwnie) więc energia jest ponownie przekazywana do kondensatora (rysunek d). Wreszcie ładunek na kondensatorze osiąga maksimum a prąd w obwodzie zanika. Stan końcowy jest więc taki jak początkowy tylko kondensator jest naładowany odwrotnie (rysunek e).Sytuacja powtarza się, tylko teraz prąd rozładowania kondensatora będzie płynął w przeciwnym kierunku. Mamy więc do czynienia z oscylacjami (drganiami) ładunku (prądu). Zmienia się zarówno wartość jak i znak (kierunek) ładunku na kondensatorze i prądu w obwodzie.
Do opisu ilościowego tych drgań skorzystamy z prawa Kirchhoffa, zgodnie z którym
gdzie UL i UC są napięciami odpowiednio na cewce i kondensatorze. Korzystając z równań:
i
C = Q/∆V
otrzymujemy
Ponieważ I = dQ/dt więc
Jest to równanie drgań w obwodzie LC.
Równanie to opisujące oscylacje ładunku ma identyczną postać jak równanie drgań swobodnych masy zawieszonej na sprężynie, przy czym następujące wielkości elektryczne odpowiadają wielkościom mechanicznym: ładunek Q → przesunięcie x; indukcyjność L → masa m; pojemność C → odwrotność współczynnika sprężystości 1/k; prąd I = dQ/dt → prędkość v = dx/dt.
Ponieważ zagadnienie drgań swobodnych zostało rozwiązane w paragrafie 12.1 więc możemy skorzystać z uprzednio wyprowadzonych wzorów i napisać rozwiązanie równania.
oraz
gdzie częstość drgań jest dana wyrażeniem
Z powyższych wzorów wynika, że w obwodzie LC ładunek na kondensatorze, natężenie prądu i napięcie zmieniają się sinusoidalnie tak jak dla drgań harmonicznych.
Zauważmy ponadto, że między napięciem i natężeniem prądu istnieje różnica faz, równa π/2. Gdy napięcie osiąga maksymalną wartość to prąd jest równy zeru i na odwrót.
Podsumowując: w obwodzie LC obserwujemy oscylacje (drgania) pola elektrycznego w kondensatorze i pola magnetycznego w cewce. Mówimy, że w obwodzie LC obserwujemy drgania elektromagnetyczne, a sam obwód LC nazywamy obwodem drgającym.
81. Rezonans - Drgania ładunku, prądu i napięcia w obwodzie odbywają się z częstością zasilania ω (częstością wymuszającą). Analogicznie jak dla mechanicznych drgań wymuszonych amplituda tych drgań zależy od ω i osiąga maksimum dla pewnej charakterystycznej wartości tej częstości.
Dla małego oporu R czyli dla małego tłumienia warunek rezonansu jest spełniony gdy
gdzie ω0 jest częstością drgań nietłumionych (drgania w obwodzie LC).
Natężenie prądu osiąga wtedy wartość maksymalną równą
Widzimy, że natężenie prądu w obwodzie jest takie, jak gdyby nie było w nim ani pojemności ani indukcyjności.
82.Wirowym polem elektrycznym nazywamy Indukowane pole elektryczne (ze względu na kształt linii)
83. Równania Maxwella (dla próżni)
|
Prawo |
Równanie |
1 |
prawo Gaussa dla elektryczności |
|
2 |
prawo Gaussa dla magnetyzmu |
|
3 |
uogólnione prawo Faradaya |
|
4 |
uogólnione prawo Ampère'a |
|
1.Twierdzenie Gaussa to prawo wiażące pole elektryczne z jego źródłem czyli ładunkiem elektrycznym. Pole elektryczne jest polem wektorowym, dlatego też zgodnie z twierdzeniem Gaussa-Ostrogradskiego można zdefiniować wielkość zwaną strumieniem natężenia pola: strumień natężenia pola elektrycznego przenikający przez dowolną powierzchnię zamkniętą w jednorodnym środowisku o bezwzględnej przenikalności dielektrycznej ε, jest równy stosunkowi całkowitego ładunku znajdującego się wewnątrz tej powierzchni do wartości tejże przenikalności.
strumień magnetyczny przechodzący przez powierzchnię zamkniętą równa się zeru. Fakt ten wynika stąd, iż pole magnetyczne jest bezźródłowe - nie istnieją w świecie ładunki magnetyczne, a linie wektora indukcji nie mają początku ani końca. Zgodnie z twierdzeniem Gaussa-Ostrogardskiego dywergencja pola jest wszędzie równa zero.
3.Wyraża relację pomiędzy zmianą wartości strumienia magnetycznego przechodzącego przez obszar objęty przez zamkniętą pętlę i pola elektrycznego wyindukowanego na tej pętli. Trzecie równanie Maxwella dotyczy efektu elektrycznego zmieniającego się pola magnetycznego. Jest to tzw. prawo indukcji Faradaya. Prawo indukcji Faradaya głosi, że indukowana w obwodzie elektrycznym SEM równa jest szybkości, z jaką zmienia się strumień przechodzący przez ten obwód. Znak minus dotyczy kierunku indukowanej SEM, przeciwstawiającej się kierunkowi płynącego w obwodzie prądu elektrycznego.
4. Ostatnie - czwarte równanie Maxwella związane jest z prawem Amper'a, które zostało rozszerzone przez Maxwella. Dotyczy ono efektu magnetycznego zmieniającego się pola elektrycznego.Prąd płynący w przewodniku wytwarza wokół siebie pole magnetyczne. W równaniu μo oznacza przenikalność magnetyczną próżni, dl jest styczną do drogi całkowania, zaś i jest natężeniem płynącego prądu elektrycznego
84. Co to jest fala elektromagnetyczna
Falę elektromagnetyczną stanowią zmienne w czasie i powiązane ze sobą pola elektryczne i magnetyczne.
Przyczyną powstawania fal elektromagnetycznych jest fakt, że zmiana pola elektrycznego w jednym punkcie powoduje zawsze powstanie nowego pola elektromagnetycznego w sąsiedztwie, co z kolei spowoduje powstanie kolejnego pola elektromagnetycznego dalej itd...
Falami elektromagnetycznymi są m.in. fale radiowe, mikrofalowe, świetlne.
Fala elektromagnetyczna jest szczególnym typem fali, ponieważ nie wymaga ośrodka materialnego i może rozchodzić się w próżni. W przypadku fali elektromagnetycznej - po "zatrzymaniu czasu" wyróżnić można obszary dodatniej (większej) i ujemnej (mniejszej) wartości pola elektrycznego.
Po "uruchomieniu czasu", obszary te na przemian "zamieniają się rolami" - raz większa wartość pola jest w jednym punkcie, a później wartość ta maleje, gdy z kolei inny punkt przejmuje w tym czasie maksymalną wartość pola - w efekcie fala się rozchodzi (mówimy też o "propagacji" fali).
Fala łączy w sobie dwie zmienności: zmienność w czasie, zmienność w przestrzeni
Fala elektromagnetyczna jest więc rozchodzącym się w przestrzeni sprzężonym polem elektrycznym (opisuje je wektor natężenia elektrycznego E) i magnetycznym (opisuje je wektor indukcji magnetycznej B), prostopadłych do siebie i do kierunku rozchodzenia się, o natężeniach zmieniających się sinusoidalnie. Fala elektromagnetyczna niesie ze sobą energię.
Prędkość jest równa prędkości światła, ulega interferencji, dyfrakcji i spełnia prawa odbici i załamania.
Fale elektromagnetyczne zależnie od długości fali (częstotliwości) przejawiają się jako (od fal najdłuższych do najkrótszych): fale radiowe, podczerwień, światło widzialne, ultrafiolet, promieniowanie rentgenowskie (promieniowanie X), promieniowanie gamma. Kwantem fali elektromagnetycznej jest foton.
Na diagramie literom odpowiadają rodzaje fale:
A - fale radiowe bardzo długie
B - fale radiowe
C - mikrofale
D - podczerwień
E - światło widzialne
F - ultrafiolet
G - promieniowanie rentgenowskie (promieniowanie X)
H - promieniowanie gamma
I - widmo światła widzialnego
Wyszukiwarka