7.3.3. KLASYFIKACJA CZWÓRNIKÓW
Czwórnik pasywny i aktywny
Czwórnik nazywamy pasywnym, jeżeli przy początkowej energii zgromadzonej w układzie równej zeru, całkowita energia dostarczona do niego jest nieujemna:
(7.30)
Niespełnienie tego warunku oznacza aktywność czwórnika.
W stanie ustalonym przy wymuszeniach harmonicznych:
czwórnik jest PASYWNY, jeśli moc czynna pobierana przez wrota czwórnika jest nieujemna dla każdej pary napięć i prądów zaciskowych
![]()
(7.31)
czwórnik jest AKTYWNY, jeśli istnieją takie wartości napięć i prądów zaciskowych, dla których pobierana przez wrota moc czynna jest ujemna
![]()
(7.32)
Czwórnik prawidłowy i nieprawidłowy
Czwórnik klasy SLS nazywamy czwórnikiem prawidłowym, jeśli posiada wszystkie macierze charakterystyczne.
Warunkiem koniecznym i wystarczającym prawidłowości czwórnika jest aby dowolna z jego macierzy charakterystycznych była nieosobliwa, a wszystkie jej elementy były różne od zera. Z wybranej macierzy można wówczas wyznaczyć pozostałe macierze:
Z∙Y=1 ; H∙G=1 (7.33)
Czwórnik nazywamy zdegenerowanym (nieprawidłowym), jeśli posiada nie więcej niż pięć i nie mniej niż dwie macierze charakterystyczne.
Czwórnik, który posiada wyłącznie jedną macierz charakterystyczną nazywamy zerowym.
Czwórnik bilateralny, unilateralny i nielateralny
Ze względu na zdolność do przesyłania sygnałów w obu lub jednym kierunku, czwórnik nazywamy:
|
- jeśli posiada obydwie macierze łańcuchowe ( A i B ) - co oznacza możliwość przesyłania sygnałów w obie strony. |
|
- jeśli posiada tylko jedną macierz łańcuchową ( A lub B ):
|
|
- jeśli nie posiada żadnej macierzy łańcuchowej - co oznacza niezdolność do przesyłania sygnałów. |
Czwórnik odwracalny i nieodwracalny
Czwórnik, który spełnia zasadę wzajemności, nazywamy czwórnikiem ODWRACALNYM lub inaczej ENERGETYCZNIE SYMETRYCZNYM. Zgodnie z zasadą wzajemności warunki odwracalności czwórnika można wyrazić za pomocą elementów macierzy charakterystycznych:
Macierz |
Y |
Z |
A |
B |
H |
G |
Czwórnik odwracalny |
y12= y21 |
z12= z21 |
det A=1 |
det B=1 |
h12= - h21 |
g12= - g21 |
Czwórnik, który nie spełnia zasady wzajemności jest czwórnikiem nieodwracalnym.
Czwórnik symetryczny i niesymetryczny
Czwórnik, który spełnia zasadę wzajemności, a ponadto zamiana miejscami wrót wejściowych z wyjściowymi tego czwórnika nie powoduje żadnych zmian wielkości elektrycznych zaciskowych, nazywamy CZWÓRNIKIEM SYMETRYCZNYM lub inaczej IMPEDANCYJNIE SYMETRYCZNYM.
Konsekwencją symetryczności czwórnika są szczególne własności jego macierzy charakterystycznych:
Macierz |
Y |
Z |
A |
B |
H |
G |
Czwórnik symetryczny |
|
|
|
|
|
|
|
y12= y21 |
z12= z21 |
det A=1 |
det B=1 |
h12= - h21 |
g12= - g21 |
|
y11= y22 |
z11= z22 |
a11= a22 |
b11= b22 |
det H=1 |
det G=1 |
UWAGA: nie każdy czwórnik odwracalny jest symetryczny - warunkiem koniecznym symetryczności czwórnika jest jego odwracalność.
7.3.4. PARAMETRY ROBOCZE CZWÓRNIKA
Jeżeli do jednych wrót czwórnika dołączono źródło wymuszeń, natomiast drugie wrota obciążono dwójnikiem bezźródłowym, to czwórnik taki pracuje w układzie przesyłowym i charakteryzują go parametry robocze.
Przyjmujemy założenie, że źródło wymuszeń o napięciu źródłowym Eg i impedancji wewnętrznej Zg dołączono do wrót pierwotnych, a wrota wtórne czwórnika obciążono dwójnikiem o impedancji Zobc (rys.7.11)
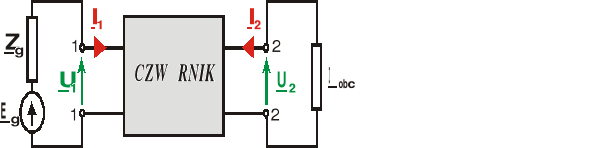
Rys.7.11.
Do parametrów roboczych czwórnika klasy SLS - należą:
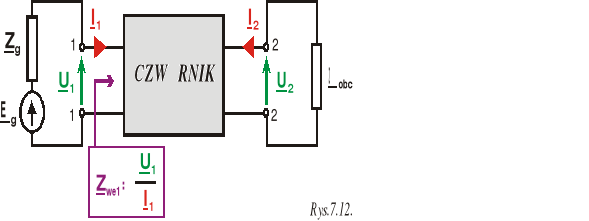
1. IMPEDANCJA WEJŚCIOWA PIERWOTNA
Określana jest na zaciskach pierwotnych jako stosunek napięcia do prądu pierwotnego przy obciążeniu czwórnika po stronie wtórnej dwójnikiem o impedancji Zobc (rys.7.12).
Jeśli czwórnik opisuje się równaniami impedancyjnymi, to z pierwszego równania (7.20):
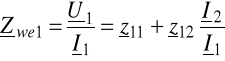
Natomiast z drugiego równania, po uwzględnieniu, że ![]()
Stąd: 
(7.34)
W granicznych przypadkach, gdy strona wtórna jest:
rozwarta (Zobc = ∞ ), impedancja ta staje się
impedancją wejściową pierwotną rozwarciową Z1o i wynosi:
![]()
(7.35)
zwarta (Zobc = 0 ), impedancja ta staje się
impedancją wejściową pierwotną zwarciową Z1z i wynosi:

(7.36)
2. IMPEDANCJA WEJŚCIOWA WTÓRNA
Jest impedancją widzianą z zacisków wtórnych czwórnika przy zwartym źródle Eg po stronie pierwotnej (tzn. Eg = 0) i wyraża się stosunkiem napięcia do prądu wtórnego (rys.7.13).
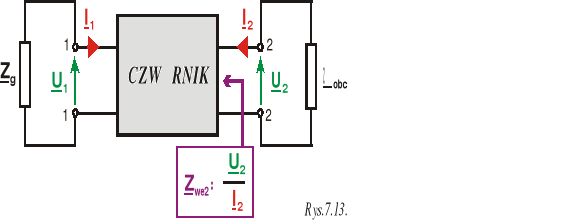
Postępując analogicznie jak dla impedancji wejściowej pierwotnej i pamiętając, że ![]()
, otrzymuje się:
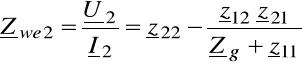
(7.37)
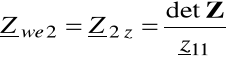
W granicznych przypadkach, gdy strona pierwotna jest:
rozwarta (Zg = ∞ ), impedancja ta staje się
impedancją wejściową wtórną rozwarciową Z2o i wynosi
![]()
(7.38)
zwarta (Zg = 0 ), impedancja ta staje się
impedancją wejściową wtórną zwarciową Z2z i wynosi
(7.39)
3. WZMOCNIENIE NAPIĘCIOWE (TRANSMITANCJA NAPIĘCIOWA)

(7.40)
Gdy uwzględni się fakt zasilania z rzeczywistego źródła energii, mówimy o skutecznym wzmocnieniu napięciowym:

(7.41)
4. WZMOCNIENIE PRĄDOWE (TRANSMITANCJA PRĄDOWA)
(7.42)
Gdy uwzględni się fakt zasilania z rzeczywistego źródła energii, mówimy o skutecznym wzmocnieniu prądowym:
(7.43)
UWAGA:
Wszystkie określone powyżej transmitancje (wzmocnienia) mogą być również wyrażone w mierze logarytmicznej, tzn. w neperach lub decybelach:
7.3.5. PARAMETRY FALOWE CZWÓRNIKA
Parametry falowe czwórnika określane są dla szczególnych warunków pracy czwórnika, a mianowicie przy tzw. dopasowaniu falowym.
IMPEDANCJA FALOWA
Rozważmy czwórnik pracujący w układzie przesyłowym - źródło wymuszeń o napięciu źródłowym Eg i impedancji wewnętrznej Zg dołączono do wrót pierwotnych, a wrota wtórne czwórnika obciążono dwójnikiem o impedancji Zobc (rys.7.14)
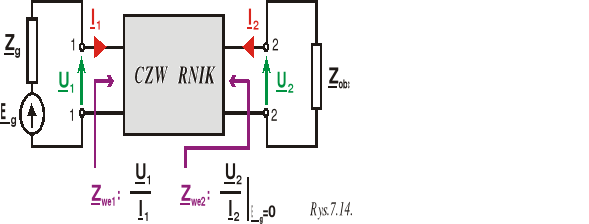
W oparciu o równania łańcuchowe oraz uwzględniając, że
![]()
i ![]()
można impedancje wejściowe określić związkami:
impedancja wejściowa pierwotna 
(7.44)
impedancja wejściowa wtórna 
(7.45)
Dopasowaniem falowym nazywamy tak dobrane impedancje Zg i Zobc, że zachodzi:
![]()
(7.46)
Oznacza to, że przyjmujemy istnienie takich dwóch impedancji
![]()
(7.47)
nazywanych falowymi (charakterystycznymi) odpowiednio strony pierwotnej i strony wtórnej.
Mówimy wówczas o dopasowaniu czwórnika do źródła lub do obciążenia.
Jeśli impedancja wewnętrzna generatora zasilającego czwórnik od strony wrót wejściowych jest równa jego impedancji falowej pierwotnej (Zg=Zf1), to mówimy że czwórnik jest dopasowany falowo na wejściu
- wówczas impedancja wejściowa pierwotna jest równa jego impedancji falowej pierwotnej.
Jeżeli natomiast impedancja obciążenia dołączona do wrót wyjściowych czwórnika jest równa jego impedancji falowej wtórnej (Zobc=Zf2), to mówimy, że czwórnik jest dopasowany falowo na wyjściu
wówczas impedancja wejściowa wtórna jest równa jego impedancji
falowej wtórnej.
Czwórnik jest w stanie dopasowania falowego, jeśli jest dopasowany na wejściu i na wyjściu. |
Przyjmując zależności 7.47 i 7.46 oraz biorąc pod uwagę wzory 7.44 oraz 7.45, otrzymamy:
Rozwiązując otrzymany układ równań ze względu na Zf1 i Zf2, dostaniemy:
impedancja falowa pierwotna 
(7.48)
impedancja falowa wtórna 
(7.49)
Impedancje falowe można uzależnić od impedancji wejściowych stanu jałowego i stanu zwarcia.
Ponieważ impedancja wejściowa pierwotna:
rozwarciowa

(7.50)zwarciowa

(7.51)
natomiast impedancja wejściowa wtórna:
rozwarciowa

(7.52)zwarciowa

(7.53)
zatem
impedancja falowa pierwotna ![]()
(7.54)
impedancja falowa wtórna ![]()
(7.55)
IMPEDANCJĘ FALOWĄ CZWÓRNIKA określamy jako średnią geometryczną impedancji falowej pierwotnej i wtórnej
(7.56)
Jeśli czwórnik jest symetryczny (a11=a22), to posiada tylko jedną impedancję falową:

(7.57)
Dla czwórnika niesymetrycznego możemy również posługiwać się pojęciem przekładni impedancyjnej czwórnika, określonej następująco:
(7.58)
Łatwo wówczas wykazać, że
(7.59)
i co jest oczywiste: p = 1 dla czwórnika symetrycznego.
TAMOWNOŚĆ FALOWA (współczynnik przenoszenia falowego)
Drugim istotnym parametrem falowym czwórnika jest tamowność falowa „g”. Określa się ją dla czwórnika dopasowanego falowo na
wyjściu jak tamowność falową pierwotną
(7.60)wejściu jak tamowność falową wtórną
(7.61)
Dla czwórnika odwracalnego oba współczynniki przenoszenia są sobie równe i wyraża się je za pomocą parametrów macierzy łańcuchowej jako:
![]()
(7.62)
oraz w postaci hiperbolicznej
(7.63)
W przypadku czwórnika symetrycznego - pamiętając, że
(7.64)
(7.65)

(7.66)
oraz w postaci hiperbolicznej
![]()
(7.67)
Istnieje również możliwość wyznaczenia tamowności falowej czwórnika symetrycznego w oparciu o pomiar jego impedancji w stanie zwarcia i w stanie jałowym.
(7.68)
Ogólnie tamowność jest liczbą zespoloną o postaci ![]()
gdzie:
a=Re(g)-współczynnik tłumienia (tłumienność),
b=Im(g)-współczynnik przesunięcia fazowego (przesuwność).
Zależność (7.65) przedstawia liczbę zespoloną:

(7.69)
której:
moduł informuje o tym, ile razy sygnał wejściowy przewyższa sygnał wyjściowy - jest zatem miarą tłumienia sygnału przy przejściu przez czwórnik;
argument podaje wartość kąta zawartego pomiędzy sygnałem wejściowym i wyjściowym - jest zatem miarą zmiany fazy sygnału przy przejściu przez czwórnik.
- 26 -
- 27 -
Wyszukiwarka