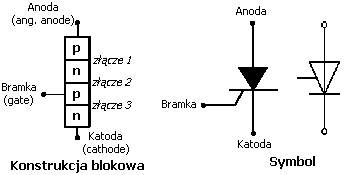
Tyrystor możemy załączyć impulsem bramkowym, ale tylko, gdy jest prawidłowo spolaryzowany (anoda:+ katoda:-). Oczywiście może załączyć się także jak dynistor przy dużych du/dt - skokach napięcia między anodą a katodą. Jednak takiego załączania unikamy (w końcu chcemy sterować). Metoda przekroczenia napięcia przełączenia (w dynistorze napięcie włączenia) jest niedopuszczalna - może nastąpić trwałe uszkodzenie elementu!
Załączenie tyrystora jak wcześniej wspomniałem następuje przy odpowiedniej polaryzacji i podaniu dodatniego względem katody impulsu bramkowego. Im mniejsze jest napięcie między anodą a katodą, tym większy musi być prąd bramki. Wyłączenie tyrystora następuje przy obniżeniu napięcia anoda-katoda lub spadku wartości przepływającego prądu poniżej IH - prądu podtrzymania.
TRIAK Uproszczoną strukturę blokową przedstawia poniższy rysunek.
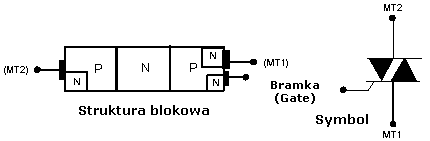
Działanie triaka jest analogiczne do przeciwsobnego połączenia dwóch tyrystorów (SCR) - patrz poniższy rysunek.
![]()
Na rysunku bramki tyrystorów pokazane są oddzielnie dla każdego tyrystora. Triak posiada tylko jedną bramkę - włączenie następuje niezależnie od polaryzacji (w przeciwieństwie do tyrystora, który może być załączony tylko, jeśli potencjał anody jest większy od potencjału katody).
Triak działa w obu kierunkach polaryzacji i zachowuje się jak tyrystor w dodatniej części swojej charakterystyki (stan blokowania bądź przewodzenia) - charakterystyka triaka jest symetryczną względem początku układu charakterystyką tyrystora:
DIAK Konstrukcja diaka przypomina tranzystor NPN (bez wyprowadzenia bazy).
![]()
Struktura analogiczna do tranzystora bipolarnego zapewnia wysoką impedancję w stanie blokowania, aż do punktu napięcia przebicia (VBO) powyżej którego, element wchodzi w obszar tzw. ujemnej rezystancji tzn. wraz ze wzrostem prądu maleje napięcie na nim.
Układ rozruchowy
Przy rozruchu załączane są na przemian T5, T3 oraz T6, T2. Pozostałe dwa pozostają wyłączone. Na kondensatorze rozruchowym występuje napięcie odpowiednio duże umożliwiające prawidłową komutację drugiej pary tyrystorów. Kiedy napięcia i prądy wzrosną do nominalnych wartości następuje zamiana pomiędzy wyłączonymi dotychczas tyrystorami z tyrystorami rozruchowymi, które pozostają wyłączone przy dalszej pracy, podobnie kondensator Cs.
Metody załączania tyrystorów (SCR, a także dynistor, diak i triak)
Są trzy metody załączenia (włączenia - ogólnie rzecz biorąc wprowadzenia w stan przewodzenia) tyrystorów i triaków (w tym dwie ostatnie dotyczą również dynistorów i diaków): Podanie impulsu bramkowego: Należy zadbać aby wartości napięcia i prądu impulsu podawanego na bramkę przekraczały
wartości katalogowe IGT oraz VGT. Dla tyrystorów SCR impuls musi być dodatni względem katody. Natomiast jeśli chodzi
o triaki impuls może być zarówno dodatni jak i ujemny, ale obie polaryzacje mają różne wymagania dotyczące wartości IGT oraz VGT. Jak już powyżej zostało zaznaczone metoda ta odnosi się tylko do tyrystorów SCR i triaków z prostej przyczyny
że diaki i dynistory nie posiadają bramki. Przyrost napięcia dv/dt Załączenie następuje pod wpływem szybko narastającego napięcia pomiędzy anodą i katodą w przypadku tyrystora SCR, czy pomiędzy zaciskami głównymi triaka czy diaka.Pomiędzy poszczególnymi złączami PN istnieją (wynikające z natury konstrukcji) pojemności złączowe. Poniższy rysunek przedstawia elementy sterowane bramką wraz z pojemnościami złączowymi.
Kiedy gwałtownie przyłożymy napięcie do złącza PN popłynie prąd ładowania o wartości:![]()
i =
![]()
Kiedy
osiągnie wartość większą od IGT następuje załączenie. Ta metoda załączenia nie powoduje uszkodzenia elementu o ile nagły wzrost prądu ma ograniczoną wartość (di/dt).
Generalnie gdy istnieje możliwość takiego niekontrolowanego załączenia (poprzez szybki wzrost napięcia) stosujemy układy odciążające (z ang. snubber network). Przekroczenie napięcia blokowania - napięcie przełączenia Jest metodą załączania diaków i dynistorów.
Zdecydowanie natomiast nie jest zalecaną metodą załączania tyrystorów SCR i triaków.
.
DIODA(mocy) Działanie "zwykłej" diody jest bardzo proste - przewodzi ona prąd tylko w jednym kierunku.
![]()
Kiedy dioda przewodzi (potencjał anody -a jest większy od potencjału katody) występuje na niej spadek napięcia - ok.~1V. Również w kierunku zaporowym (odwrotnie spolaryzowana dioda - wyższy potencjał katody) teoretycznie prąd nie powinien płynąć, jednak pojawia się znikomo mały prąd wsteczny. Napięcie na diodzie w tym stanie jest równe napięciu zasilania. Przy dużych napięciach rzędu 100, 200 i więcej V - napięcie na diodzie podczas przewodzenia jest pomijalne.
Wyznaczmy teraz charakterystykę prądowo-napięciową (statyczną) diody.
Będziemy przykładać różne napięcia (regulowane źródło zasilania) i zmierzymy odpowiadające im prądy (nie obchodzi nas zachowanie prądu pomiędzy poszczególnymi punktami - czyli zmiany dynamiczne, interesują nas tylko wartości ustalone - stąd nazwa ch-ka statyczna). Otrzymamy w ten sposób następującą charakterystykę: Dioda zaczyna przewodzić po przekroczeniu napięcia progowego (ok. 1V dla diod mocy i 0,6V dla małych diod elektronicznych krzemowych). Dalsze zwiększanie napięcia wywołuje bardzo niewielkie zmiany prądu. W kierunku zaporowym (zaworowym) napięcie rzędu setek woltów wywołuje prąd pomijalny (kilka mA w diodach mocy). Przekroczenie granicznej wartości napięcia wstecznego powoduje gwałtowny wzrost prądu wstecznego. Powoduje to lokalne przyrosty temperatury (200..250°C) w wyniku których, najczęściej dochodzi do uszkodzenia ("spalenia") elementu. Tę część charakterystyki można wyznaczyć tylko raz!
Prostowniki sterowane JEDNOPULSOWE
Najprostszym rozwiązaniem jest następujący układ prostownika jednopulsowego (jednofazowego):
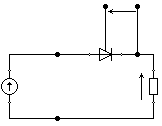
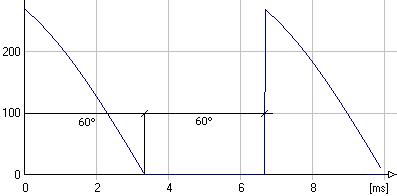
Tyrystor jest polaryzowany w kierunku przewodzenia w czasie dodatniej półfali napięcia zasilania,
jeśli więc doprowadzimy impuls bramkowy w zakresie 0° ¸ 180° to przejdzie on w stan przewodzenia. Prąd odbiornika musi być większy od prądu wyłączenia (prąd podtrzymania IH) tyrystora. Kąt załączania może być regulowany tylko w zakresie 0°, 180° (0 - ∏).
DWUPULSOWE Wady tej pozbawiony jest już prostownik dwupulsowy (mostkowy, dwupołówkowy):
Dodatnia półfala napięcia E polaryzuje w kierunku przewodzenia parę tyrystorów T2 i T4. W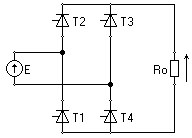
czasie
ujemnej T1 i T3. Tak więc impulsy bramkowe par tyrystorów powinny być przesunięte o 180°
TRÓJPULSOWE W układach trójfazowych z dostępnym przewodem zerowym stosujemy układy trójpulsowe (gwiazdowe):
trójfazowych z dostępnym przewodem zerowym stosujemy układy trójpulsowe (gwiazdowe):
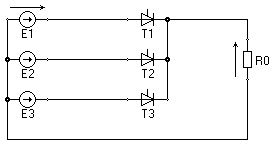
Impulsy bramkowe są przesunięte o 2/3∏.∏. Kąt załączania tyrystorów VZ jest związany z kątem opóźnienia wysterowania a zależnością: α = Vz - ∏/6 .
.
.
.
.
.
.
.
.
.
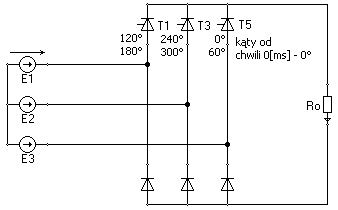
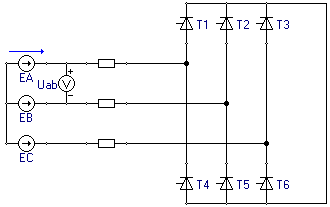
SZESCIOPULSOWE W układach trójfazowych bez dostępnego przewodu zerowego lub w przypadku, kiedy moc zasilanego przez przekształtnik odbiornika przekracza dopuszczalne obciążenie przewodu neutralnego stosuje się prostowniki sześciopulsowe: Układ sześciopulsowy można traktować jako połączenie szeregowe dwóch
prostowników trójpulsowych, utworzonych przez tyrystory o połączonych katodach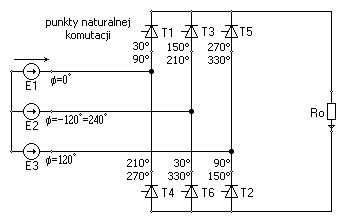
(grupa katodowa T1, T3, T5) i o połączonych anodach (grupa anodowa T4, T6, T2). Średnie napięcie wyjściowe takiego układu jest sumą napięć dwóch mostków trójpulsowych.
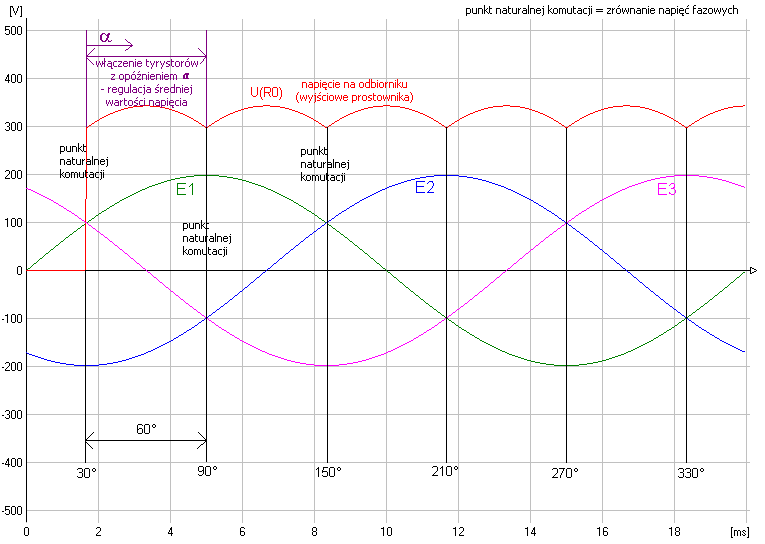
Podczas pracy (przy przewodzeniu ciągłym) zawsze jeden tyrystor grupy katodowej i jeden tyrystor grupy anodowej znajduje się w stanie przewodzenia. Tyrystory grupy katodowej przewodzą przy dodatnich półfalach napięć fazowych, natomiast grupy anodowej - w czasie ujemnych. Co ∏/3 (60°) następuje zmiana konfiguracji, natomiast każdy z tyrystorów przewodzi przez 2/3∏ (120°).
Impulsy bramkowe obu grup przesunięte są o 'pi' (180°).
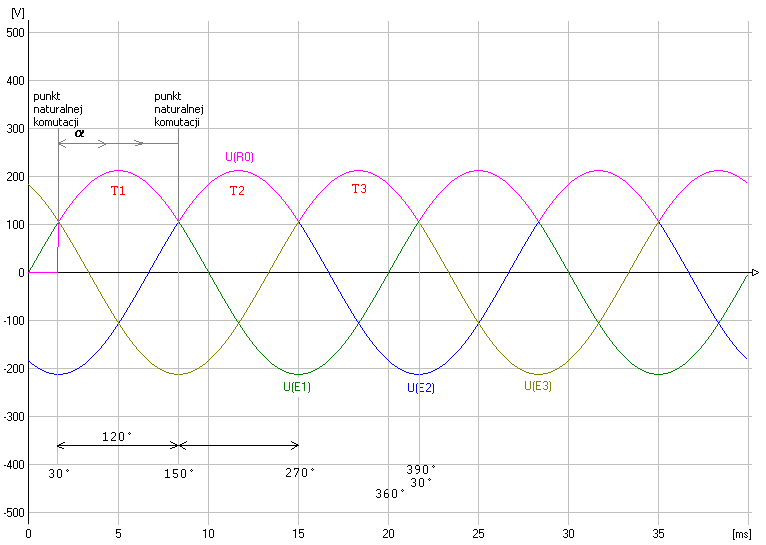
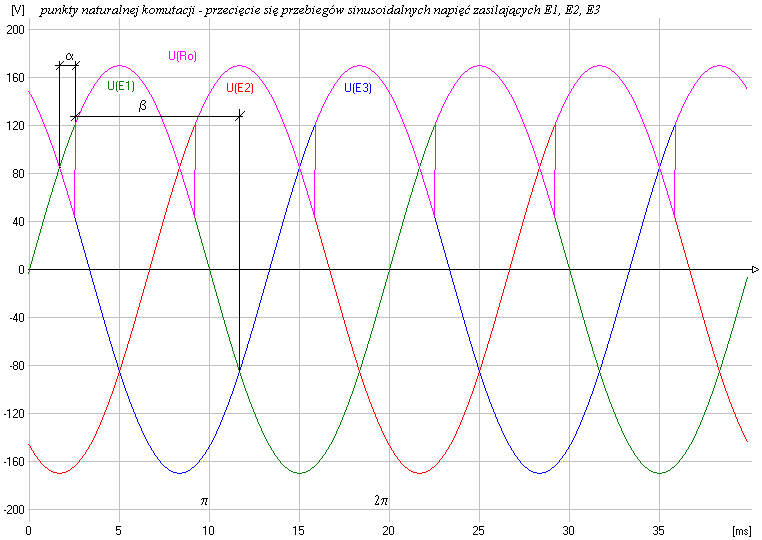
Kąty opóźnienia a wysterowania tyrystorów liczone są od punktów wyznaczonych zrównaniem się wartości chwilowych kolejnych napięć fazowych lub przewodowych (punkty naturalnej komutacji).
Prostownik trójfazowy gwiazdowy Prostownik trójpulsowy sterowany
Praca prostownika wymaga dostępnego przewodu neutralnego. Może on być
zasilany poprzez dławiki sieciowe lub bezpośrednio z linii. Ponadto przez przewód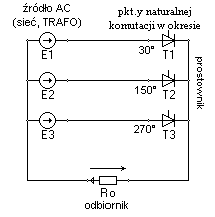
neutralny będzie przepływał prąd stały, co nie zawsze jest dopuszczalne.
Praca prostownikowa - przebiegi
Rysunek 2. Przebiegi czasowe napięć w prostowniku z rys. 1 (dla = 15°, odbiornik typu R - przewodzenie ciągłe)
(alfa) - kąt opóźnienia wysterowania tyrystorów, mierzony od punktu naturalnej komutacji (przecięcie się sinusoidalnych przebiegów napięć, zasilających prostownik); (beta ß) - kąt wyprzedzenia wysterowania tyrystorów, stosowany
PROSTOWNIK trójfazowy mostkowy
Układ sześciopulsowy można traktować jako połączenie szeregowe dwóch prostowników trójpulsowych, utworzonych przez tyrystory o połączonych katodach (grupa katodowa - T1, T3, T5) i o połączonych anodach (grupa anodowa - T4, T6, T2). Numery tyrystorów wskazują kolejność załączania (1 i 2, 2 i 3, itd). Sposób numerowania łatwo zapamiętać wg następującej reguły: "górne" numerujemy nieparzyście, a "dolne" tak, aby róznica względem numeru "górnego" wynosiła 3.
Podczas pracy (przy przewodzeniu ciągłym - zawsze płynie prąd) zawsze jeden tyrystor grupy katodowej i jeden tyrystor grupy anodowej znajduje się w stanie przewodzenia. Tyrystory grupy katodowej przewodzą przy dodatnich półfalach napięć fazowych, natomiast grupy anodowej - w czasie ujemnych. Poniżej przedstawiony jest przebieg dla odbiornika czysto rezystancyjnego, tyrystory wysterowane są w punktach naturalnej komutacji (pracują jak diody).
Fazowanie
Można przeprowadzić je w dwojaki sposób. W obu przypadkach w pierwszym etapie fazujemy układ tyrystorów połączonych w gwiazdę. W pierwszej metodzie korzystając z faktu iż katody tyrystorów jednej grupy są połączone traktujemy je jako
połączenie gwiazdowe (druga grupa - anodowa - pozostaje nie podłączona).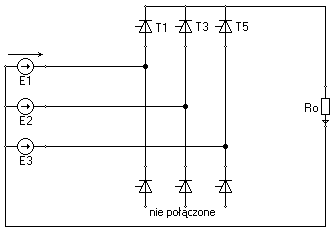
Odbiornik, na którym będziemy przeprowadzać fazowanie, wpinamy między połączone katody a przewód zerowy źródła napięcia (transformatora). Jeśli takiego przewodu nie ma należy wytworzyć sztuczne zero poprzez połączenie trzech jednakowych rezystorów z każdą z faz. Fazowanie przeprowadzamy dla napięcia sterującego równego zero.
US = US0 cosα = 0 =› α = 90 0 Na odbiorniku przy prawidłowym
podłączeniu impulsów sterujących powinnyśmy uzyskać następujący przebieg:
Mając już dobrane impulsy sterujące łatwo fazować pozostałe trzy. Sposób ten
nazywamy metodą dwóch gwiazd. Można też zamienić tyrystory jednej grupy na
diody i fazować znów tylko trzy elementy.
Podobnie jak poprzednio napięcie sterujące wynosi zero. Kąt opóźnienia wysterowania od punktów naturalnej komutacji poszczególnych tyrystorów wynosi 90°. Powinnyśmy dążyć do przebiegu:
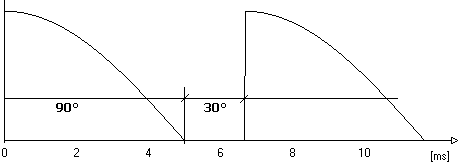
W obu przypadkach na pełnym mostku powinnyśmy uzyskać (US=0; =90°) przebieg:
Tranzystorowy trójfaz.sterownik mocy Regulacji mocy dostarczanej do odbiornika dokonujemy poprzez zmianę skutecznej wartości prądu przez niego przepływającego. W roli kluczy stosujemy łączniki półprzewodnikowe ze względu na dużą liczbę przełączeń. Jak widać na powyższym schemacie występują tu trzy pary tyrystorów. Po krótkim zastanowieniu można odnaleźć analogię powyższego schematu do prostownika
mostkowego. Po "przesunięciu" łączników na drugą stronę odbiornika otrzymujemy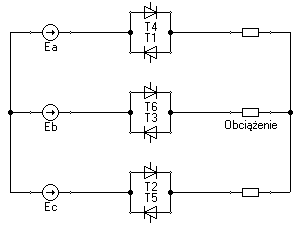
układ prostownika ze zwartą stroną stałoprądową.
W praktyce jako regulatora mocy możemy więc zastosować zwykły prostownik mostkowy wraz ze sterownikiem. Warunkiem takiego ułatwienia jest nieskojarzony odbiornik trójfazowy (muszą być dostępne dwa zaciski każdej fazy). Napięcie na wybranej fazie odbiornika może być:
-równe zeru - nie przewodzi żaden z tyrystorów włączonych szeregowo w fazie;
-równe połowie napięcia międzyfazowego - przewodzi jeden z tyrystorów rozpatrywanej fazy oraz któryś z pozostałych dwóch faz; -równe napięciu fazowemu - przewodzą tyrystory we wszystkich trzech fazach. Poniższy rysunek przedstawia napięcia zasilania: fazowe i międzyfazowe (UAB). Punkt naturalnej komutacji wypada naprzecięciu się (zrównaniu) napięć fazowych. Od tego punktu przyjęło się mierzyć kąt wysterowania (załączenia łączników) (alfa). W naszych pomiarach na oscyloskopie wygodniej będzie posługiwać się katem załączenia VZ, który liczony jest od przejścia napięcia przez zero.
Przekształtnik impulsowy Jak sama nazwa wskazuje służy on do przekształcania, przetwarzania prądu stałego na prąd stały lecz o innej regulowanej wartości średniej napięcia. Stałe napięcie wejściowe przekształcane jest na ciąg impulsów prostokątnych o stałej amplitudzie. Regulacji wartości napięcia wyjściowego możemy dokonać w dwojaki sposób. Po pierwsze poprzez zmianę czasu trwania impulsów napięciowych przy stałej ich częstotliwości (regulacja współczynnika wypełnienia - z ang. Pulse Width Modulation PWM). Drugi sposób polega na odwróceniu ról tzn. zmianę częstotliwości przy stałym czasie trwania każdego pojedynczego impulsu. Schemat przerywacza tranzystorowego :
Rysunek przedstawia podstawowy układ pracy przerywacza tranzystorowego.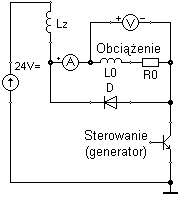
Tranzystor bipolarny mocy pracuje tu jako klucz (załączony - wyłączony), stany pośrednie w tym zastosowaniu nie są wykorzystywane. Sterowany jest przebiegiem prostokątnym o odpowiednich parametrach (częstotliwość, współczynnik wypełnienia) tak, aby uzyskać pożądane napięcie na odbiorniku. Dioda połączona równolegle do odbiornika służy do zapewnienia drogi dla prądu w momencie wyłączenia klucza. Zapobiega to wymuszonemu prądowi przewodzenia tranzystora czy powstawaniem przepięć, które są groźne dla klucza (przebicie). Zasadniczo stosowana jest tutaj dioda szybka, choć układ pomiarowy umożliwiał również włączenie diody prostowniczej. Indukcyjność LZ reprezentuje impedancję obwodów zasilania. Układ pomiarowy umożliwiał jej zwarcie w ten sposób mogliśmy przeanalizować wpływ poszczególnych elementów na pracę układu - o czym dalej.
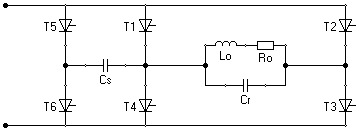
Falownik równoległy prądu
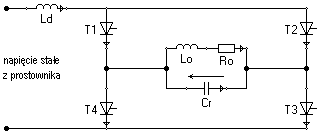
Na wejściu umieszczony jest dławik Ld o dużej indukcyjności, dzięki czemu prąd pobierany z prostownika ma stałą wartość. Tyrystory T1, T3 są włączane na przemian z T2, T4. Podczas, gdy przewodzą tyrystory T1, T3 kondensator Cr zostaje naładowany tak jak zaznaczono na rysunku powyżej. Kiedy załączymy drugą parę tyrystorów (T2, T4) dodatnie napięcie z kondensatora pojawia się na katodzie T1 oraz ujemne na anodzie T3. Wskutek tej skokowej zmiany napięcia anodowego na ujemne tyrystory T1, T3 zostają niemal natychmiastowo wyłączone. Analogicznie dzieje się przy odwrotnej zamianie pary przewodzących tyrystorów. Czasami by ograniczyć skoki prądów w chwilach przełączania stosuje się dodatkowe indukcyjności Lk włączone szeregowo z tyrystorami lub w gałęzi poprzecznej mostka(szeregowo z układem Ro, Lo, Cr). Rolę tych indukcyjności spełniać mogą również przewody łączeniowe. Okazuje się jednak, że wskutek dużej indukcyjności Ld po włączeniu zasilan prąd narasta powoli, na kondensatorze Cr napięcie jest zbyt małe, aby prawidłowo przebiegła komutacja (przełączenia tyrystorów). Samoczynny rozruch jest niemożliwy. Dlatego konieczne jest zastosowanie układu pomocniczego:
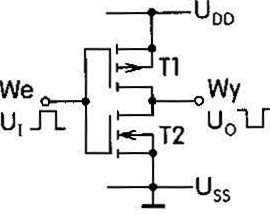
Inwertor CMOS
Układy CMOS (ang. Complementary MOS ) zawierają w swej strukturze tranzystory MOSFET zarówno z
kanałem typu N jak i typu P. Tranzystory te tworzą tak zwane pary komplementarne. Każda para zawiera tranzystor MOS o przewodnictwie N i tranzystor MOS o przewodnictwie P. Tranzystory pracują jako przełączniki a nie tylko wtórniki. Włączony tranzystor polowy zachowuje się jak rezystor o małej wartości rezystancji zwierający sygnał do właściwej szyny zasilającej. Układy MOS są wrażliwe na przebicia ładunkiem elektrostatycznym. Stawia to określone wymagania odnośnie do zasad przechowywania
i obchodzenia się z układami MOS. Nie należy dotykać ich wyprowadzeń. Powinno się je przechowywać z połączonymi ze sobą końcówkami. Rezystancja wejściowa układów CMOS jest tak duża, że jej wpływ
na pracę układu można pominąć. Typowa wartość prądu wejściowego zawiera się w przedziale 10-100 pA. Prąd wyjściowy charakteryzuje obciążalność układu. Wartość maksymalna tego prądu jest uwarunkowana wartością dopuszczalną prądu przepływającego w obszarze źródło - dren. Ze względu na wydajność prądową i pobór prądu w stanach statycznych można wyjście układu CMOS obciążyć praktycznie dowolna liczbą wejść. Jedynym czynnikiem ograniczającym dopuszczalną obciążalność jest obciążenie pojemnościowe. Wartość pojemności wejściowej układów CMOS wynosi 5-10 pF. Obciążenie pojemnościowe układu ma istotny wpływ na czasy narastania, opadania i propagacji sygnałów. Wydłużony czas propagacji sprawia, że każde przełączenie bramki wymaga zwiększonego poboru energii ze źródła (przez dłuższy czas oba tranzystory są w stanie przewodzenia i nasycenia ). Im większe jest obciążenie pojemnościowe, tym dłuższe są czasy narastania, opadania i propagacji sygnałów oraz tym większa jest moc pobierana ze źródła, a zatem - tym mniejsza dopuszczalna częstotliwość przełączania układów. Na podstawie maksymalnej częstotliwości pracy układu - z jaką chcemy , aby układ pracował - można określić dopuszczalne obciążenie pojemnościowe, czyli liczbę sterowanych układów CMOS.
Transformator
We współczesnych zasilaczach stabilizowanych, izolację galwaniczną pomiędzy wejściem a wyjściem, jak również niezbędne przetwarzanie napięcia, uzyskuje się przy pomocy transformatorów w. cz. z rdzeniem ferrytowym. Materiał z którego zbudowany jest rdzeń powinien zapewniać: a)dużą indukcje nasycenia dzięki czemu rdzeń może mieć małe objętości; b)dużą przenikalność magnetyczną; c)możliwie jak
największą rezystywność ( aby straty na prądy wirowe były małe mimo dużej częstotliwości pracy); Rdzeń powinien mieć budowę, pod
względem magnetycznym, możliwie jak najbardziej zwartą. Duże straty na prądy wirowe przy częstotliwościach powyżej 20 kHz uniemożliwiają stosowanie rdzeni konwencjonalnych. W przypadku zadanej konfiguracji transformatora i przy stałej mocy strat, objętość rdzenia jest określona następującą zależnością: V~(1/Bmaxf)6/7 gdzie Bmax jest funkcją maksymalną (indukcja może przyjmować wartości z zakresu 0...±Bmax).
Porównując wymaganą objętość rdzenia ferrytowego z objętością transformatora sieciowego ( f=100 Hz) uzyskuje się dla transformatora przepustowego (przy częstotliwości 20 kHz) stosunek 1:33, a dla transformatora przeciwsobnego (przy częstotliwości 40 kHz), stosunek 1:60. Nie uwzględniono przy tym, że straty w rdzeniu ferrytowym są mniejsze niż w rdzeniu transformatora sieciowego. Na skutek wyższych częstotliwości straty na prądy wirowe w uzwojeniach transformatora w. cz. są większe. Transformator przetwornicy zaporowej powinien być większy od transformatora przetwornicy przepustowej, gdyż wartość skuteczna prądu przepływającego przez uzwojenie wtórne jest zawsze
wieksza od wartości prądu obciążenia. Dla przebiegu trójkątnego otrzymuje się w przypadku idealnym, przy 50% współczynniku wypełnienia:
Ponadto mniejsza powinna być również indukcyjność rozproszenia. Przy opracowaniu transformatora na minimum mocy strat,
należy unikać stosowania dużej liczby zwojów uzwojenia pierwotnego. Należy starać się, aby uzwojenia wypełniły dostępną przestrzeń, a indukcyjność rozproszenia była możliwie mała. Istnieją różne konfiguracje uzwojeń rozwijanych na karkas transformatora.
Przy uzwojeniu dzielonym lub wielowarstwowym jedno z uzwojeń jest umieszczone między połówkami drugiego uzwojenia. Przy takim rozwiązaniu obie wartości maksymalne pola magnetycznego (o przeciwnych znakach) wynoszą, w przybliżeniu, połowę wartości pola przy niedzielonych uzwojeniach. Dzięki temu poziom prądów wirowych jest niższy, co prowadzi do zmniejszenia strat transformatora. Wadą takiego rozwiązania jest użycie większej ilości ekranów i izolacji niż w układzie niedzielonych uzwojeń, co prowadzi do zwiększenia objętości.
Wielowarstwowe nawijanie uzwojeń umożliwia poprawę sprzężenia między obu uzwojeniami. Uzwojenie pierwotne jest podzielone na dwie połówki uzwojeniowe, wewnątrz których znajdują się uzwojenia wtórne i odmagnesowujące - umożliwiające odmagnesowanie obwodu magnetycznego. Dla zmniejszenia wpływu naskórkowości należy stosować uzwojenie bifilarne.
Model transformatora impulsowego Omawiając układy zaporowe przekazywania energii nie można pominąć matematycznego modelu transformatora impulsowego, który opisuje istotne wielkości przy analizie. Do istotnych zagadnień wynikających z właściwości transformatora
impulsowego a których nie można pominąć w trakcie analizy należą: -zmiana amplitudy impulsów i polaryzacji, -izolacja galwaniczna obwodów
-dopasowanie rezystancji, -separacja składowej stałej i zmiennej, -zniekształcenia liniowe i nieliniowe. Parametry strony wtórnej transformatora
zostały sprowadzone do strony pierwotnej co znacznie upraszcza analizę, sam model przyjmuje wówczas postać czwórnika typu Γ (Rysunek 20).
Ze wzrostem częstotliwości impulsów lub zmniejszeniem ti wymiary zewnętrzne transformatora impulsowego i jego ciężar maleją przy tej samej mocy pozornej.
Układy zabezpieczające
Części składowe przetwornic DC - DC zbudowanych z podzespołów półprzewodnikowych, mogą ulec uszkodzeniu w ciągu l μs, na skutek przepięcia lub przetężenia.
Zasilacze ze stabilizowanymi przetwornicami DC - DC powinny zawierać następujące zabezpieczenia:
-ograniczenie prądu przy włączeniu zespołu, aby zapobiec powstawaniu zbyt dużych prądów wejściowych;
-zabezpieczenie nadprądowe (przy chwilowym lub ciągłym przeciążeniu);
-zabezpieczenie przepięciowe (przy krótkim lub ciągłym przepięciu);
-zabezpieczenie przed zbyt niskim napięciem wejściowym;
-zabezpieczenie przed zakłóceniami w pętli regulacyjnej (niewłaściwa praca pętli stabilizacji napięcia może spowodować skoki napięcia wyjściowego bez przekroczenia wartości granicznej prądu; może to zagrozić kondensatorowi wyjściowemu lub obciążeniu, ponadto może być przyczyną dalszych zakłóceń w zespole.);
-zabezpieczenie przed skokami cieplnymi;
-zabezpieczenie przed nieodpowiednią biegunowością napięcia wejściowego (w zespołach z układem prostowniczym Graetza napięcie wejściowe może być przyłożone z dowolną biegunowością);
zabezpieczenie wyjścia zespołu przed napięciem o przeciwnej biegunowości (w zespołach łączonych równolegle lub szeregowo). Dioda dołączona równolegle do wyjścia zespołu stanowi dostateczne zabezpieczenie
Przerzutnik SR - jest najprostszym układem przerzutnika bistabilnego .Normalnym stanem spoczynkowym przerzutnika jest stan zerowych sygnałów wejściowych , to jest stan wejść S = 0 , R = 0 podczas którego stan przerzutnika nie zmienia się . Dla S = 0, R = 1 przeżutnik pozostaje wyzerowany (Q = 0) Dla S = 1 , R = 0 następuje zmiana stanu przerzutnika na Q = 1 .Stan jednakowych sygnałów 1 na obu wejściach są nie dozwolone ,gdyż oba wyjścia ( Q , -Q ) powinny być w stanie 0 , co sprzeczne z założeniem że w przerzutniku jedno wejście jest negacją drugiego .Przeżutnik SR można łatwo zrealizować z różnych elemętów logicznych. Najcześciej się go wykonuje z elementów NOR lub NAND.
Q = qR + S Przerzutnik SR zbudowany z elementów NAND zmienia swój stan przy doprowadzeniu do wejścia S lub R sygnału 0 . z elementem NOR który zmienia swój stan przy doprowadzeniu do wejścia S lub R sygnału 1.
LICZNIKI -układy cyfrowe służące do zliczania liczby impulsów podanych na jego wejście zliczające .1 Liczniki asynchroniczne (szeregowe)- Na ogół są wolniejsze od liczników synchronicznych lecz mają prostrzą strukturę logiczną . W liczniku przerzutniki są połączone szeregowo a impulsy zliczane są doprowadzone do pierwszego przerzutnika , co oznacza że zmiany na wejściach licznika nie występują jednocześnie.
Synchroniczne (równoległe) - Są znacznie szybsze od l. asynchronicznych lecz posiadają bardziej złożoną strukturę logiczną.Charakteryzują się tym że wejścia wszystkich przerzutników są połączone równolegle zapewniając jednakowe zmiany stanów przerzutników przerzutników takt odpowiedniego zbocza impulsu zliczanego. O tym które przerzutniki mają swój takt obsługuje odpowiedni układ kordynacyjny.
Zniekształcenia w wzmacniaczach - Istotnym parametrem wzmacniacza jest pasmo przenoszenia przedział częstotliwości między dolną a górną często. graniczną .Rzeczywiste układy elektroniczne jak wiadomo nie przenoszą całego widma sygnału co prowadzi do zniekształceń widma sygnału wyjściowego w stosunku do widma sygnału wejściowego tzn. że wzmacniacz nie jednakowo wzmacnia wszystki9e częstotliwości sygnału wejściowego . Zniekształcenia te są nazwane zniekształceniami liniowymi ,oprócz tych wzmacniacz wnosi jeszcze inne znieksz. nieliniowe .Przy dużych wartościach amplitudy sygnału sterującego elementy aktywne wykazują wyrażne właściwości nieliniowe .Oznacza to powstanie dodatkowych składowych harmonicznych harmonicznych widmie częstotliwościowym sygnału wyjściowego.
Zasilacze impulsowe składają się z impulsowego stabilizatora napięcia stałego i zasilacza niestabilizowanego. Impulsowy stabilizator napięcia stałego jest systemem o zamkniętej pętli działania. Proces stabilizacji jest nieciągły na skutek przetwarzania sygnału błędu na ciąg impulsów, sterujących pracą tranzystora przełączającego układu przekazywania energii. Jednym ze sposobów zmiany względnego okresu włączania i wyłączania elementu przełączającego, jest modulacja współczynnika wypełnienia impulsów, przy stałej częstotliwości impulsowania. Współczynnik wypełnienia impulsów
jest stosunkiem czasu trwania pojedynczych impulsów do okresu sygnału
Pojemnościowy układ przekazywania energii
Na Rysunku 7 przedstawiono układ przekazywania energii małej mocy z pojemnością. Układ zawiera dwa elementy przełączające pracujące na przemian. Po włączeniu przełącznika SA, ładują się kondensatory C, i C2 poprzez diody Z), i D3. Kondensatory C, i C2 tworzą właściwie dzielnik napięcia. Po wyłączeniu przełącznika SA włącza się przełącznik SB, a kondensator C, rozładowuje się poprzez elementy S„ i D2. Następnie cały proces rozpoczyna się od nowa. Ponieważ napięcie wejściowe dzieli się między kondensatorami C1 i C2, więc napięcie wyjściowe jest niższe od napięcia wejściowego. Układ ma małą sprawność, gdyż energia zgromadzona w kondensatorze C,, jest tracona w jednym cyklu pracy, w elementach SB i D2..
Stabilizatory o działaniu ciągłym - linioweNajprostszym stabilizatorem napięcia jest układ z wykorzystaniem diody Zenera.Elementem stabilizującym jest dioda Zenera. Jednak w wypadku dużych zmian prądu wyjściowego uzyskuje się niewielką stabilność napięcia. Dlatego powyższy układ rzadko bywa stosowany jako stabilizator. Często natomiast wykorzystywany jest jako proste źródło napięcia odniesienia.Poniższy rysunek przedstawia jeden z prostszych stabilizatorów liniowych. Na jego przykładzie można prześledzić ogólną ideę działania stabilizatorów o działaniu ciągłym. Dioda Zenera pełni rolę źródła napięcia odniesienia. Tranzystor pierwszy (na schemacie w kółku)
pełni rolę elementu regulacyjnego który w zależności od potrzeb jest mniej lub bardziej otwierany. Sygnał sprzężenia zwrotnego pobierany jest z dzielnika napięć umieszczonego na wyjściu układu. Pracuje on w sposób ciągły - co jest powodem niskiej sprawności układu. Przy dużej różnicy napięć pomiędzy wejściem a stabilizowanym napięciem wyjściowym oraz dużej wartości prądu obciążenia, na tym tranzystorze powstają duże starty mocy wydzielając się w postaci ciepła.
Ten podstawowy układ wyposaża się w dodatkowe elementy ograniczające prąd wyjściowy oraz zabezpieczenia termiczne.W ten sposób zbudowane są popularne scalone stabilizatory napięć o napięciu wyjściowym ustalonym (78xx - napięcia z góry ustawione przez producenta; xx oznacza jego wartość np. 7805 - 5V) oraz regulowanym (LM317 itp.).Stabilizatory impulsowe W odróżnieniu od stabilizatorów liniowych w stabilizatorach impulsowych tranzystor pracuje jako klucz (załącz/wyłącz), dzięki czemu znacznie ograniczamy straty oraz uzyskujemy znacznie większe sprawności.Tranzystor T1 kluczowany jest częstotliwością od 1kHz do 100kHz (ze względu na pasmo słyszalnych przez człowieka częstotliwości zazwyczaj staramy się pracować powyżej 15kHz).Stosowanie jednak większych częstotliwości niesie za sobą większe straty - związane ze stratami przełączania klucza, jednocześnie podwyższenie częstotliwości poprawia stabilizację napięcia. Trzeba dążyć do kompromisu pomiędzy tymi dwoma właściwościami.
fffffffsf
przekładnia n = Z2/Z1 przy założeniu że tn << ti
zwis 
w oparciu o powyższe zależności mamy:
![]()
-
+
-
+