Cyfrówka - wykład 1 (24. luty 2003)
Organizacja komputerów:
SISD (single instruction stream, single data stream - jeden strumień instrukcji, jeden strumień danych), lata 40te, później Commodore, ZX Spectrum, wykonywanie tylko 1 programu w określonej chwili czasu.;
SIMD (single instruction, multiple data) - jeden strumień instrukcji, wiele strumieni danych). Układy dobre do wykonywania określonego zadania, np. mnożenie 2 macierzy przez siebie („w kółko to samo, zmieniają się dane”), sieci neuronowe. SIMD są uzupełnieniem SISD lub MIMD, nie działają samodzielnie;
MISD - układy istniejące tylko w teorii;
MIMD - wiele instrukcji, wiele danych - środowisko wielozadaniowe.
Elementy komputera:
jednostka centralna ALU (arithmetical logic unit),
pamięć,
urządzenia wejścia/wyjścia.
Elementy te połączone są magistralami (przewodami); rodzaje magistral:
danych,
adresowe (odwoływanie do określonego elementu),
sterująca (czuwająca nad poprawnością przepływu informacji).
PROCESOR - budowa
arytmometr (=liczydło)
+, -, : ,* - podstawowe działania na liczbach stało- i zmiennoprzecinkowych, więcej z koprocesorem arytmetycznym,
OR, AND...,
słowo procesora - maksymalny pakiet danych który może przetworzyć arytmometr,
rejestr flagowy, statusowy, PSW. Rejestr flagowy niesie informację z jakim skutkiem wykonała się operacja, działa tutaj sprzężenie zwrotne - może nakazać powtórzenie operacji; rozgałęzienia w programie zależą od rejestru flagowego.
rejestry:
ogólnego przeznaczenia - pamiętanie danych, informacje o adresach wskazujących np. na komórki pamięci lub urządzenia I/O (we/wy). Jest ich dużo (około 100) - im więcej rejestrów tym lepiej, szybsze przekazywanie danych, szerokość rejestru dopasowana do słowa procesora (np. słowo 16-bitowe -> rejestr 16-bit albo więcej).
specjalne - czuwanie nad prawidłowością pracy procesora.
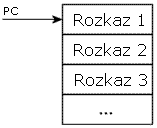
PC - program counter - licznik programów, czuwanie nad poprawną realizacją zadań wykonywanych przez procesor. PC wskazuje który rozkaz ma być wykonany, potem wskazuje na następny,
IR - instruction register - rejestr instrukcji - przechwycenie rozkazu pobranego z pamięci i trafia do IR - dekodowanie rozkazu („co jest do zrobienia”),
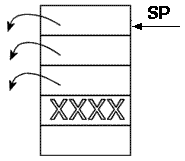
SP - wskaźnik stosu. Stos - fragment pamięci operacyjnej, dostępny w specyficzny sposób - dane są ułożone „jedna na drugiej”, możliwy jest tylko dostęp do szczytu stosu, a na szczyt wskazuje właśnie SP. Na stosie: 1. odkładamy stan procesora, 2. służy do wywołania przerwania, 3. służy do trzymania danych.
magistrale wewnętrzne - łączenie elementów ze sobą
procesor 8051
ALU - 8-bitowa, wykonuje operacje arytmetyczne i logiczne (XOR, inne podstawowe) stałoprzecinkowe, operacje logiczne również na pojedynczych bitach.
PSW - słowo stanu procesora - 8 bitów
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
CY |
AC |
F0 |
RS1 |
RS0 |
OV |
- |
P |
D7 (MSB): CY - przepełnienie
D6: AC - przeniesienie połówkowe (przy kodzie BCD)
D5: programowalny
D4, D3: do wyboru jeden z czterech banków rejestru
D2: OV - znacznik nadmiaru (w kodzie U2)
D0: parzystość - parzysta lub nieparzysta liczba jedynek w akumulatorze
PC - 16-bitowy
SP - ograniczony
ACC - akumulator - 8-bitowy, operacje arytmetyczne i logiczne
B - rejestr B - mnożenie i dzielenie (dzielnik albo mnożnik), reszta z dzielenia
R0...R7 - 8-bitowe, rejestry ogólnego przeznaczenia, R0 i R1 mogą służyć do adresowania. Cztery zestawy tych rejestrów, tylko jeden może być aktywny.
Pamięć: 128 komórek RAM, 4k ROM
4 porty: P0, P1, P2, P3 - porty równoległe, P0 jako magistrala danych i część magistrali adresowej (młodsza część), P2 jako starsza część magistrali adresowej.
Dodatkowo rejestry specjalne, układy czasowo-licznikowe (3 sztuki).
LISTA ROZKAZÓW PROCESORA
Jest funkcjonalnie pełna - nie ważna jest budowa listy rozkazów, ile jest rozkazów ani jakie są, ale każdy program da się opisać i wykonać tym procesorem - co byśmy nie wymyślili, da się zrobić, ograniczenia to głównie czas wykonania i brak pamięci.
Podział ze względu na budowę listy rozkazów:
CISC, idea - jak najwięcej rozkazów (300, 500...), sporo działań na danych -> wykonanie trwa długo;
RISC - lista okrojona - mało rozkazów (około 30), rozkazy proste i szybko się wykonują -> lepsze od CISC.
W 8051 jest 111 rozkazów.
GRUPY ROZKAZÓW
rozkazy przesłań - rejestr -> rejestr, pamięć -> rejestr, ... - przemieszczanie danych
rozkazy arytmetyczne
rozkazy logiczne
rozkazy sterujące
Wykonanie rozkazów w procesorze:
pobranie rozkazu z pamięci (FETCH) - PC wskazuje, który rozkaz i pobieramy do procesora;
dekodowanie - co do zrobienia, skąd wziąć dane, gdzie przesłać wyniki;
liczenie adresu efektywnego, może być dostęp do pamięci albo układów I/O, powiązane z trybami adresowania procesora - sposób dostępu do danych (zasobów):
tryb rejestrowy - dane są w rejestrach ogólnego przeznaczenia, wynik może trafić do rejestru - b. szybki,
tryb rejestrowy pośredni - w rejestrze jest adres, spod którego trzeba pobrać dane, nie trzyma adresu wprost, wynik tak samo - adres, gdzie umieścić wynik,
tryb bezpośredni - adres podany po kodzie rozkazu, mamy dany adres efektywny, nie trzeba go liczyć, ale odwołujemy się do innych elementów systemu -> dłużej to trwa niż w trybie rejestrowym,
tryb natychmiastowy - dane zawarte wprost w rozkazie (dane szczątkowe)
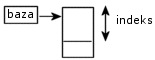
tryb bazowo-indeksowy - jest odmianą trybu rejestrowego pośredniego, przydaje się, gdy konstrukcje programistyczne są tak poukładane (np. tablica).
pobranie operandów (operands fetch);
wykonanie (execute);
przechowanie rezultatów (results store).
Ile czasu jest potrzebne na wykonanie rozkazu? Tam, gdzie jest kontakt z pamięcią, I/O - 3*T. W sumie około 14*T.
Jak to przyspieszyć?
S1 |
S2 |
S3 |
S4 |
S5 |
S6 |
S1 |
S2 |
S3 |
S4 |
S5 |
S6 |
rozkaz 1 |
rozkaz 2 |
||||||||||
|
|
S1 |
S2 |
S3 |
S4 |
S5 |
S6 |
3T |
|
S1 |
S2 |
S3 |
S4 |
S5 |
S6 |
|
3T |
|
S2 |
S3 |
S4 |
S5 |
S6 |
|
|
18T |
Wady - niektóre S trwają T, a inne 3T. Rozwiązanie - wszystko po 3T. Wada - wykonanie po 18T, ale za to kolejne rozkazy są wykonywane po 3T, a to już całkiem nieźle :)
Inny problem - PC jest tylko jeden, skąd wziąć kolejne?
Cyfrówka - wykład 2 (3. marzec 2003)
|
|
S1 |
S2 |
S3 |
S4 |
S5 |
S6 |
3T |
|
S1 |
S2 |
S3 |
S4 |
S5 |
S6 |
|
3T |
|
S2 |
S3 |
S4 |
S5 |
S6 |
|
|
18T |
Rozkaz następny - ten po bieżącym wykonywanym, wtedy 1 licznik PC wystarcza (jeśli program jest wykonywany liniowo). Jest to przetwarzanie potokowe.
Liniowość może być zachwiana - poprzez:
skoki:
bezwarunkowe - jeśli trzeba zmienić porządek programu, to to się stanie
warunkowe - zmiana porządku programu zależy od warunku (np. overflow)
wysyłanie procedur funkcji:
warunkowe (testowanie flag, znaczników).
Skoki - kiedy znamy nowe miejsce wykonania? 3. etap - liczenie adresu efektywnego, dla skoku warunkowego - w 5. etapie (wykonanie), najpierw testowanie warunków.
Jeśli wystąpi skok to procesor może:
przeczekać - dla skoku bezwarunkowego czekamy do S3, dla warunkowego do S5 (i tracimy takt procesora jeśli skoku nie ma);
nie martwię się - pobieramy dalsze rozkazy „bez zastanowienia”, bo dla >0,5 przypadków skoków nie ma, poza tym jak jednak będzie skok i kilka taktów pójdzie na marne to nic strasznego się nie stanie. Jednak w tym podejściu następuje przepływ bezużytecznych informacji;
ORMO czuwa :) - wymagana specjalna konstrukcja procesora, procesor wykonuje działania potokowe i jeszcze jak pozna miejsce nowego działania programu to buforuje te rozkazy bez przetwarzania ich. Jeśli skok się wykonał - to już mamy te rozkazy i je dekoduje, itd. - przyspieszone działanie.
Przetwarzanie potokowe - wiele kolejnych rozkazów realizowanych nie do końca równolegle („na zakładkę”).
SYSTEM PRZERWAŃ PROCESORA
System przerwań - „skrzynka pierwszej pomocy”. Zjawiska nieprzewidziane:
zagrożenie natury sprzętowej (awarie elementów);
zagrożenie programowe (np. dzielenie przez zero);
usługi dla użytkownika.
Jak sobie poradzić?
wyłączenie sprzętu, zapisanie danych
użytkownik zleca systemowi wykonanie czegoś.
„Recepty” - procedura, procesor porzuca to co robił i ją wykonuje:
napisana przez twórców, konstruktorów, nie można jej zmieniać;
napisana przez twórców, konstruktorów, można dołączyć własną (zmodyfikować);
miejsce puste, można stworzyć własny system przerwań.
Działanie systemu przerwań:
procesor sprawdza stabilność systemu przerwań po wykonaniu rozkazu (dość często),
urządzenie zgłasza usterkę, wtedy procesor reaguje;
zgłoszenie przerwania - procesory mają:
linie zgłoszenia przerwania (jest ich kilka): Int Req (interrupt request),
albo rejestry ze znacznikami, że są zgłoszone przerwania.
Kiedy jest przerwanie, to:
procesor sprawdza zgłoszenie przerwania;
wyłącznie systemu przerwań (opcjonalnie) - procesor przyjmuje jedno przerwanie do obsługi (i tylko 1), inne nie są realizowane - muszą poczekać. Jest to funkcja opcjonalna, ponieważ jeśli pojawi się sprawa poważniejsza to procesor się nią zajmuje;
zachowanie stanu procesora (zapamiętanie tego co się to tej pory działo):
przełączanie danych - istotne dane są w bezpiecznym miejscu (na stosie) - rejestry PC i inne ważne rejestry,
przełączanie kontekstu - jeśli procesor ma kilka zestawów rejestrów - wykorzystywany jest ten wolny (szybsze, nie ma transmisji danych).
Zachowanie stanu może być realizowane:
automatycznie - procesor bierze na siebie zachowanie danych;
programowo - programista musi zachować to co może być zniszczone, procesor nie wykona tego automatycznie
kombinowane - automatycznie: licznik rozkazów, rejestry specjalne; programista: rejestry wspólnego przeznaczenia.
4) identyfikacja przerwania - procesor uaktywnia linie odpowiedzi na przerwanie (Int Ack - interrupt acknowledge).
Do procesora:
numer przerwania (procesor prześle go magistralą danych),
adres przerwania.
ARBITRAŻ PRZERWAŃ (określa kolejność wykonywania przerwań).
sprzętowy
1. równoległy 2. szeregowy 3. równoległo - szeregowy
1. - wszystkie urządzenia są przypięte do dekodera przerwań, który ustala kolejność zgłoszenia przerwania do procesora. Numeracja wejść decyduje o priorytecie przerwań. Priorytet może być wędrujący - obsłużony idzie na koniec kolejki
2. - podaj dalej - urządzenia zgłaszające Int Req są łączone w jeden sygnał
3. - połączenie 1. i 2. - dekodery przerwań są przypięte w sposób szeregowy - rozwiązanie dobre dla wielu urządzeń.
programowy
skok do procedury obsługi przerwania,
powrót z obsługi przerwania - to co w 2) i 3), tylko w odwrotnej kolejności:
odtworzenie stanu procesora,
włączenie systemu przerwań.
SYSTEM PRZERWAŃ W 8051
5-6 źródeł przerwań:
2 zewnętrzne INT0, INT1 (linie typu Int Req),
2 od układów czasowo - licznikowych #0, #1,
1 przerwanie od portu szeregowego
szóste przerwanie od dodatkowego układu czasowo - licznikowego #2
przerwania mogą być maskowane (wyłączane) - w 8051 w sposób programowy (w 8-bitowym rejestrze IE)
|
EA |
- |
ET2 |
ES |
ET1 |
EX1 |
ET0 |
EX0 |
Nr bitu |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
EA - pozwala zamaskować wszystkie przerwania (1=wszystko włączone, 0=wszystko wyłączone)
ET2 - WŁ/WYŁ #2
ES - port szeregowy
ET1 - #1
EX1 - przerwania zewnętrzne zgłaszane linią INT1
ET0 - #0
EX0 - INTO
Cyfrówka - wykład 3 (10. marzec 2003)
Słowa sterujące i kontrolne SFR
Maska przerwań
Nr bitu (hex) |
AF |
AE |
AD |
AC |
AB |
AA |
A9 |
A8 |
|
EA |
- |
ET2 |
ES |
ET1 |
EX1 |
ET0 |
EX0 |
|
MSB |
|
|
|
|
|
|
LSB |
Przerwania od:
portu szeregowego - rejestr SCON (obsługuje port szeregowy), bity TI, RI (najmłodsze). TI - przerwanie od nadajnika - nadajnik wyśle i to sygnalizuje; RI - przerwanie od odbiornika (odebranie bajtu = zgłoszenie przerwania)
licznika #2 - w rejestrze T2CON (tylko dla 8051). TF2 - najstarszy - ślad o zgłoszeniu przerwania.
PRIORYTET PRZERWAŃ - dwuetapowy:
użytkownik może ustalić - definiuje programowo posługując się rejestrem IP:
- |
- |
PT2 |
PS |
PT1 |
PX1 |
PT0 |
PX0 |
MSB |
|
|
|
|
|
|
LSB |
PT2, PT1, PT0 - od układów czasowo - licznikowych
PS - od portu szeregowego
PX1 - priorytet przerwania zewnętrznego zgłaszanego linią INT1
PX0 - priorytet przerwania zewnętrznego zgłaszanego linią INT0
Dwa poziomy - wyższy i niższy. Użytkownik może ustawić priorytety dowolnie.
Przyjście przerwania o wyższym priorytecie powoduje przerwanie przerwania o niższym priorytecie :).
Przyjście przerwania o niższym priorytecie nie powoduje przerwania przerwania o wyższym priorytecie :)).
Jak przyjdą 2 przerwania o tym samym priorytecie, to wtedy obowiązuje następująca kolejność:
INT0#0
INT1
#1
PS
#2
Ta sekwencja jest niezmienna, spadek priorytetu uaktywnia się wtedy, gdy przychodzi kilka przerwań o tym samym priorytecie.
PROCEDURY OBSŁUGI PRZERWAŃ
Adresy stałe:
INT0 -> 3 hex
INT1 -> 13 hex
#0 -> B hex
#1 -> 1B hex
PS -> 23 hex
#2 -> 2B hex
Gdy był dostęp do rejestrów IE, IP to system nie sprawdza przerwań (dopiero po wykonaniu następnego rozkazu).
Gdy procesor wraca z procedury przerwania - odtwarza swój stan i powraca do wykonania programu zaleconego, wtedy też nie sprawdza przerwań - dopiero po wykonaniu następnej instrukcji w programie.
DMA - układ bezpośredniego dostępu do pamięci (Direct Memory Access)
Kiedy procesor za bardzo zajmuje się obsługą urządzeń WE/WY ,a nie programem, DMA ma odciążyć procesor, czyli pobiera od układu WEJ do pamięci i z pamięci do układu WYJ. Można też skopiować fragment pamięci z jednego miejsca w drugie.
Komunikacja za pomocą magistral -> procesor zarządza magistralami, ale DMA też potrzebuje do nich dostępu na poziomie procesora.
Zarządzanie magistralami - tryby pracy DMA:
blokowy
z wykradaniem taktów.
1. Tryb blokowy - jak DMA przejmie magistralę od procesora, to prowadzi transmisję od początku do końca - jest właścicielem magistrali na cały czas trwania transmisji.
DMA upora się tak szybko jak to możliwe - cenne, gdy układ WE przesyła dużo danych (np. skaner).
Procesor nie ma wtedy dostępu do magistrali - nie może pobierać argumentów, nie może wysyłać rezultatów, nie może pobrać następnego rozkazu, itp.
Wniosek - DMA działa sprawnie, procesor nie.
2. Tryb z wykradaniem taktów - właścicielem magistrali jest procesor, DMA dostaje magistralę tylko wtedy, gdy procesor jej nie potrzebuje.
Wniosek - DMA przesyła dane „kawałek po kawałku”, procesor działa bez zakłóceń.
To procesor programuje układy DMA.
Rejestry DMA:
adresowy - RA - procesor zapisuje początek adresu pamięci wykorzystywany przez DMA
licznika - RL - ilość słów, które DMA ma przyjąć albo wysłać, czyli system „początek i ile”
sterujący - RS - definiowane parametry transmisji: czy to odczyt, zapis czy kopiowanie pamięci
statusowy - RStat. - raport z działania DMA. Jeśli DMA zgłosi przerwanie - jak jest błąd lub problem, RStat. podpowie rodzaj błędu.
PROCESOR:
RD, WR (aktywne poziomem niskim) - linie odczytu i zapisu
MREQ, IOREQ - linie żądań dostępu do pamięci i układów WE/WY
BUSRQ - żądanie dostępu do magistrali
BUSACK - potwierdzenie zwolnienia magistrali
DMA:
Adres bo mamy magistralę, czyli = procesor
IOREQ bo układ wejściowy w trybie programowania
INT zgłoszenie przerwania do procesora
HOLDRQ - linie WYJ - chce się skontaktować z BUSACK
HOLDACK - kontakt z BUSACK
DMARQ - wejściowa linia
DMAACK - linia wyjściowa
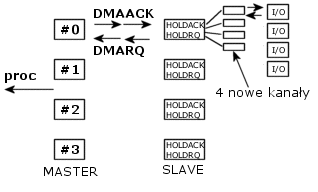
Przykład układu DMA - INTEL 8257 (8237A)
- ma 4 niezależne kanały DMA (możliwe są 4 transmisje przez kanały DMA),
- układ wyboru priorytetu (bo są 4 kanały): #0 ma najwyższy priorytet ↑↑ .......... #3 ↓↓; obsłużony na koniec kolejki,
- umożliwia hierarchiczne podłączanie kilku układów DMA,
- układ może pracować w trybie zgodnym z zapotrzebowaniem - np. w deklaracji transmisji „nie więcej niż...”
Cyfrówka - wykład 4 (17. marzec 2003)
Pamięci
Podstawowe parametry:
pojemność - ilość informacji cyfrowej jak może być zgromadzona
długość (szerokość) pamiętanego słowa. Organizacja struktury pamiętającej inf. - ilość bitów możliwych do obsłużenia naraz w procesie zapisu/odczytu. Ilość tych słów wyznacza pojemność
czas dostępu - czas od rozpoczęcia operacji do zakończenia (od odczytu pamięci do zapisania danych na magistrali danych).
Dodatkowe linie:
RAS ← (Row Address Select) - pomagają wybierać wiersz
CAS ← (Column Address Select) - pomagają wybierać kolumnę
Klasyfikacja pamięci:
ROM - Read Only Memory (tylko do odczytu)
RAM - Random Access Memory - dostęp swobodny (zapis/odczyt)
ROM:
Mask ROM
PROM
EPROM
EEPROM
EAPROM
Mask ROM - tylko do odczytu, w niej jest inf. o procesie produkcji, dostęp do inf. zaraz po włączeniu. Dane nie ulegają utracie po wyłączeniu zasilania, duża szybkość, niewielka pojemność
PROM - programowalna - sprzedawana jako czysta, programowanie tylko raz poza układem cyfrowym, w którym ma pracować, działa jak MaskROM, bardzo szybkie, niewielka pojemność
EPROM - Erasable Programmable ROM - możliwy zapis i kasowanie wielokrotne, zmiana struktury poza systemem, na drodze elektrycznej. Tranzystory z pływającą bramką, w stanie czystym same jedynki. Kasowanie - naświetlanie UV - zjawisko fotoelektryczne zewnętrzne w tranzystorach, kasowanie całości. Programowanie - setki/tysiące razy. Mogą mieć duże pojemności, nie są zbyt szybkie
EEPROM - elektrycznie kasowalne EPROMy, własności jak wyżej
EAPROM - możliwość wybiórczego kasowania i programowania, kasowanie elektryczne
RAM:
DRAM
SRAM
DRAM - elementy pamiętające - wartość ładunku na kondensatorach. Samo zasilanie nie wystarczy, kondensatory tracą ładunek - jest konieczne odświeżanie informacji, inaczej na kondensatorach mogą odłożyć się dowolne ładunki
SRAM - przerzutnik - element pamiętający - musi być utrzymana wartość logiczna ⇒ konieczne zasilanie
Odczyt i zapis
Odczyt z ROM (lub SRAM):
ustawienie adresu (odwołanie się do pamięci) - linie adresowe (np. A0 ... A14), ile linii - zależy od tego ile pamięci jest w systemie. Na podstawie adresu zostaną zaktywowane linie MREQ lub im odpowiadające
CE/ (Chip Enable) - linie wyboru określonego układu pamiętającego, aktywne stanem niskim
OE/ albo RD/ - Output Enable/Read - linie odczytu - ustawia akcję odczytu
to wszystko wysyłane do układu pamiętającego na linię adresową (np. D0 ... D7)
Zapis do SRAM
Wybór adresu i układu jak poprzednio, zmiana linii WRITE - dane z pamięci muszą być ustawione przed ustawieniem linii WRITE w stan aktywny (przez procesor lub układ DMA). Procesor lub DMA musi utrzymać dane przez czas wymagany dla pamięci, ale bez zwrotu informacji o tym, że zapis się udał czy nie.
Odczyt z DRAM:
Pojawiają się linie RAS i CAS
na magistrali adresowej jest podawany adres wiersza - jak się adres ustawi, to
linia RAS przechodzi w stan aktywny (poziom niski) - potwierdzenie, że na magistrali jest adres wiersza
na magistrali adresowej przełączanie adresu (stan niestabilny) - żeby pojawił się adres kolumny - linia CAS przechodzi w stan aktywny (poziomem niskim)
Po zakończeniu adresacji - wskazanie linii MREQ.
Gdy RAS i CAS są w stanie aktywnym, linia READ przechodzi w stan aktywny - zaczynamy realizować odczyt.
Na magistrali danych dane są odczytywane (pobierane).
Czas dostępu - od momentu rozpoczęcia adresacji do odczytu danych (tACC) - maksymalny. Można też wymyślać inne, ale po co . Koniec odczytu - linie RAS i CAS przechodzą w stan nieaktywny.
Zapis
Zmiany:
adres wiersza, aktywna linia RAS (do końca procesu zapisu)
adres kolumny, aktywna linia CAS (do końca procesu zapisu)
Ukształtowanie danych na magistrali danych, linia WR uaktywnia się.
Odświeżanie DRAM
w trybie skupionym. Dla każdego elementu odczyt i zapis. Tryb prosty, ale: fragment pamięci zawsze nieaktywny, mocne obciążenie dla systemu - ruch na magistrali, lepsze jest odświeżanie wyrywkowe (pojedynczych komórek), typy:
odświeżanie sygnałem RAS/ (RAS only refresh): - nie jest podawany adres kolumny, tylko adres wiersza. Jest specjalny licznik, który wybiera kolumny - i z tego licznika jest pobierana ta wartość (po upływie timeout-u) i ta komórkę odświeżamy (i tylko tą). Małe obciążenie dla procesora - adres wiersza i odświeżenie tylko jednej kolumny. Procesor musi sensownie wybierać adresy wiersza
odświeżanie ukryte. Odczyt/zapis kończy się kiedy linia RAS jest nieaktywna, ale CAS jest aktywna - mamy adres kolumny, potem RAS znowu aktywna, itd. Zaleta: odświeżanie wyrywkowe, przy okazji odczytu/zapisu, procesor raz podał adresy i sprawa załatwiona, adres sam się wygeneruje. Zawsze zdążymy z odświeżeniem, nic nie będzie pominięte
CAS/ przed RAS/ - najpierw w stan aktywny linia CAS, potem RAS, magistrala adresowa nie transportuje adresu, adresy wybierane z liczników. Na końcu odświeżania przechodzimy do normalnego zapisu/odczytu. Odświeżanie wybiórcze, minimalnie angażuje procesor (musi uaktywnić RAS i CAS, nic poza tym)
Odświeżanie automatyczne - układ pamięci odświeża się sam, procesor nie jest angażowany
Specjalne tryby pracy układów DRAM (kiedy chcemy zminimalizować czasy dostępu)
odczyt - modyfikacja - zapis. Zapis jest w to samo miejsce, co odczyt - jedna operacja, oszczędzamy na adresacji. Wstrzymanie pracy magistrali - np. DMA nie może pracować
tryb stronicowy - ograniczenie ilości adresowania. Adres wiersza jest stały, kolumny odczytywane z jednego wiersza (adres kolumny się zmienia)
tryb półbajtowy, RAS aktywna, CAS się zmienia (następne kolumny z tego samego wiersza)
Cyfrówka - wykład 5 (24. marzec 2003)
Tworzenie bloków pamięciowych
2 akcje:
- zwiększanie szerokości pamiętanego słowa (k-bloków o organizacji 2m słów*n, chcemy zrobić szerokość słowa n*k)
wszystkie układy jednocześnie włączone, chcemy odczyt/zapis w każdym z układów
- zwiększanie ilości pamiętanych słów. Linie danych - do każdego z układów pamiętających; linia adresowa - też, ale wyodrębnione (o adresach An ... An+1 - najstarsza część adresu) do dekodera. W danej chwili wybranie 1 układu pamiętającego odczyt/zapis też tylko w tym układzie; wiele układów odczyt/zapis taki jak w pojedynczym układzie
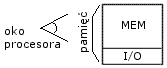
Współadresowanie i adresowanie izolowane pamięci i układów WE/WY
współadresowanie - z punktu widzenia procesora, pamięć + I/O to jeden blok - pamięć;
zalety:
- w liście programów danego procesora jest więcej instrukcji odnoszących się do pamięci niż do I/O ⇒ wygodna obsługa I/O
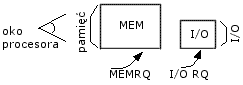
- zanika I/OREQ, MEMRQ - do zaadresowania wystarczą linie adresujące
wady:
- nie możemy użyć max. pamięci operacyjnej - ograniczona przestrzeń związana z pamięcią
- mała szansa reorganizacji
- wolniejszy dostęp (potencjalnie) do układów I/O
podsumowanie:
- układy dedykowane do obsługi określonego zadania (np. w silniku)
- dla komputera ogólnego przeznaczenia to nie ma sensu
adresowanie izolowane - 2 odrębne zasoby, bloki się nie nakładają, ale te same adresy odpowiadają MEM i I/O dla pewnego zakresu
wady:
- muszą być linie MEMRQ i I/ORQ - żeby rozgraniczyć
- dostęp do I/O jest nie zawsze wygodny
zalety:
- brak ograniczeń na ilość pamięci i adresów I/O
- brak problemów z rozbudową
podsumowanie:
- sprawdza się w komputerach ogólnego przeznaczenia, tak są zbudowane PC-ty
Konstrukcja pamięci w 8051
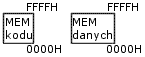
- architektura harwardzka - odseparowanie pamięci programu od pamięci danych:
MEM kodu - max. 64 kilobajty pamięci
+ pamięć zewnętrzna
+ pamięć wewnętrzna
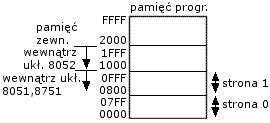
Strony - po 2 kilobajty; odwoływanie do pamięci - PC. Pamięć kodu - adresowanie w sposób rejestrowy pośredni, rejestr pośredni - PC. MOVC - kontakt z pamięcią, zaczerpnięcie danych.
PC 16 bitowy, bity 11-15 (najstarsze) - wskazują stronę (blok 2-kilowy), bity 0-10 - adres.
Pamięć danych
- max. 64 kb
+ wewnętrzna - max. FF (245 bajtów) albo 128 bajtów
+ zewnętrzna - reszta
- odwołania
+R0 i R1 - odwołanie do pamięci danych - adresowanie rejestrowe pośrednie
MOV A,@R0 - pobranie do A z wewn. pamięci danych, zawartość R0 jest adresem wskazującym na wewn. pamięć danych
MOVX A,@R0 - pobranie do A z zewn. pamięci danych, tu 8 bitów nie wystarczy - potrzebny jest rejestr DPTR
DPTR - rejestr. pośrednie przez DPTR, np. MOVX A,@DPTR
- pamięć wewnętrzna:
+ adresy 0 do 31 - zestawy rejestrów od R0 do R7
+ od 32 do 47 - obszar adresowany bitowo
+ od 48 do 127 (7FH)
+ 80H (128) - 255 (FFH) - rejestry specjalnego przeznaczenia - blok SFR
Cała pamięć wewnętrzna może być adresowana w trybie bezpośrednim.
Stos znajduje się pod adresem 07 (po restarcie).
Podsumowanie: obszar pamięci użytkowej: od 0 do 127, rejestry specjalne: od 128 do 255
Dla procesorów 8052 - modyfikacja
SFR - rejestry specjalne, tryb adresowania bezpośredniego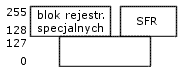
Blok rejestrów specjalnych - pośredni tryb adresowania
Przyłączanie zewnętrznych pamięci
8 linii adresowych, 8 linii danych. Magistrala danych - linie portu od P00 do P07, linie te pełnią też rolę młodszej części magistrali adresowej (multipleksowana (przełączana) linią ALE).
Port 7: P3.7 - read, P3.6 - write. Wykorzystanie starszej części adresu. P2 - starsza część magistrali adresującej.
Przyłączanie zewnętrznej pamięci programu.
Linia PSEN (budowa - bramka AND razem z READ) - sygnalizuje dostęp do zew. pamięci programu. Można połączyć pamięć programu i danych
Pamięć podręczna - CACHE
Ma lepsze parametry niż zwykła pamięć, niewielka, zawarte są w niej instrukcje często potrzebne procesorowi.
Cechy:
+ współczynnik trafienia (hit ratio) - prawdopodobieństwo, że dana potrzebna procesorowi jest w pamięci cache
+ miss ratio - danej nie ma w cache
Które dane usunąć z cache? Algorytmy usuwania danych:
+ uwzględnianie informacji statusowej
- LRU (+)
- MIN (-)
+ bez uwzględniania informacji statusowej
- FIFO (+) (first in first out) - usunięta ta, która jest najdłużej pod względem czasu trwania
- RANDOM (+)
LRU - usuwa się daną, która najdłużej nie była w użyciu
MIN - usuwa tę, która najdłużej w przyszłości nie będzie potrzebna (bardzo fajnie, ale jak to zrobić?)
Cyfrówka - wykład 6 (31. marzec 2003)
Oprócz tych 4 mechanizmów, są jeszcze mechanizmy uaktualniania pamięci podstawowej:
+ każdy zapis do cache automatycznie do pamięci podstawowej - na wypadek awarii cache, ale spada prędkość działania cache => rzadko stosowane
+ dane do pamięci podstawowej - tylko wtedy, gdy mają być skasowane z cache - wydajniejszy sposób
+ kopiowanie danych przed usunięciem i jeszcze dodatkowo badani czy dane uległy zmianom
Organizacja pamięci cache
+ cache o bezpośrednim mapowaniu (direct mapping) - dane z pamięci głównej brane są z pewnym krokiem
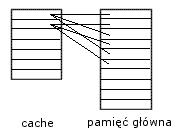
ZALETA: oszczędność w czasie przeszukiwania pamięci cache
WADA: zapotrzebowanie procesora może być takie, że będzie potrzebował dużo danych z pamięci głównej, a cache jest mała => cache mało przyspiesza działanie procesora
+ cache w pełni asocjacyjna - w danej komórce cache może być dana z dowolnego obszaru pamięci głównej, dane z każdej komórki pamięci podstawowej
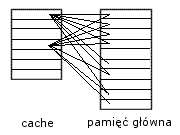
ZALETA: unikamy poprzedniej wady, można odwzorować duży fragment pamięci głównej w cache
WADA: trudno znaleźć daną w pamięci głównej
+ pamięć cache zbiorowo - asocjacyjna
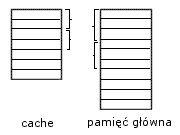
Cache dzielone na mniejsze bloki, które są odpowiedzialne za bloki pamięci głównej. Obszary pamięci są ze sobą powiązane.
ZALETY:
- wstępne uporządkowanie
- dość duża elastyczność
Każde z tych 3 rozwiązań możemy spotkać - nie ma „lidera”
Zarządzanie pamięcią operacyjną
Pamięć główna:
- podrzędna - często tworzona też z innych urządzeń, np. fragmentów dysku
- nadrzędna - zawsze pozostaje pamięcią półprzewodnikową
Pamięć podrzędna - nie powinna być pamięcią, do której system często się odwołuje, raczej do składowania informacji
Pamięć nadrzędna jest dzielona na mniejsze struktury:
- stronicowanie - podział na bloki o jednakowej wielkości. Blok - najmniejsza jednostka jaka może być przydzielona np. programowi. Stronicowanie - wygodniejsze z punktu widzenia sterowania pamięcią, po zakończeniu np. programu nowa strona może zastąpić stare „cegiełki”. Wada - często zadanie nie potrzebuje całego bloku (np. tylko parę bitów)
- segmentacja - zmiana wielkości bloku. Po zakończeniu programu mogą zostać luki po przydzieleniu bloku innemu procesowi
Cechy pamięci:
+ protekcja (zabezpieczenie)
+ udostępnianie (współdzielenie)
Mechanizmy alokacji/relokacji stron (segmentów):
+ sposób statyczny - przydzielenie zasobów w momencie uruchomienia programu, później bez zmian aż do końca
+ dynamiczny - uruchomienie nowego programu powoduje przydzielenie zasobów, natomiast zakończenie programu powoduje analizę rozdzielenia stron/segmentów
Dla mechanizmu dynamicznego:
- lokalność danych:
+ czasowa - warto rozmieścić dane w pobliżu, ale działania na tych danych będą ustawiane w określonym porządku (np. dla pętli niekoniecznie po kolei w komórkach)
+ przestrzenna - warto, żeby dane znalazły się w kolejnych strukturach/komórkach pamięci, np. tablica
Zbiór pracujący - lokalność i czasowa i przestrzenna
Koprocesor arytmetyczny
Jest wyodrębnioną częścią procesora, nie jest w stanie pełnić funkcji procesora podstawowego.
Procesor jest odpowiedzialny za wykonanie programu, koprocesor śledzi wykonanie programu i pozostaje „w gotowości”. Koprocesor posiada własną listę rozkazów, niemożliwych do wykonania przez procesor podstawowy. Koprocesor „wkracza do akcji”, gdy procesor podstawowy napotyka rozkaz koprocesora.
Rozkaz jest pobierany do rejestru IR → dekodowanie rozkazu → wykrycie, że jest to rozkaz dla koproc. → „ciało” rozkazu przesłane do koproc. (do odpowiednika rejestru IR koproc.).
Koproc. jest pozbawiony możliwości:
- pobrania adresu czerpania danych, wysłania rezultatów (wyznaczenie adresu efektywnego)
- pobrania rozkazu.
Koproc. wywalcza dostęp do magistrali i pobiera argumenty rozkazów, które ma wykonać. Oba procesory „walczą” o magistralę - koproc. pracuje w trybie „wykradania taktów”.
Rejestr znaczników - 2 bity:
00 - liczba zwykła
01 - liczba zero
10 - zawartość specjalna
11 - rejestr „pusty”
Procesory mogą pracować na liczbach stałoprzecinkowych.
Formaty liczb stałoprzecinkowych:
słowowy całkowity (word integer) - U2, 16 bitów
krótki całkowity (short integer) - U2, 32 bity
długi całkowity (long integer) - U2, 64 bity
BCD upakowany (packed BCD) - 16 bitowy BCD. BCD - 18 cyfr+znak ⇒ zajętych 80 bitów (cały rejestr)
Formaty zmiennoprzecinkowe:
format krótki rzeczywisty (short real). 1 bit na znak, 8 bitów na część wykładniczą, 24 bity na cz. ułamkową
format długi rzeczywisty. 11 bitów na wykładnik, 53 bity na cz. ułamkową - lepsza precyzja
format rzeczywisty rozszerzony - 16 bitów na wykładnik, 64 bity na część ułamkową - maksymalne wykorzystanie 80 bitów
Formaty danych:
znak (0=+) S |
wykładnik E |
ułamek F |
Obiekt |
0 |
MAX |
≠0 |
Plus nieliczba (+NAN) |
0 |
MAX |
0 |
+∞ |
0 |
0<E<MAX |
≠0 |
Liczba dodatnia |
0 |
0 |
≠0 |
Liczba dodatnia w postaci nieznormalizowanej |
0 |
0 |
0 |
+0 |
1 |
0 |
0 |
-0 |
1 |
0 |
≠0 |
Liczba ujemna w postaci nieznormalizowanej |
1 |
0<E<MAX |
≠0 |
Liczba ujemna |
1 |
MAX |
0 |
-∞ |
1 |
MAX |
≠0 |
Minus nieliczba (-NAN) |
Ograniczanie precyzji:
IC (infinity control) - np. możemy ustawić tylko +∞ (-∞ nie ma)
PC (precision control):
00 24 bity
10 53 bity
11 64 bity
01 zarezerwowane
RC - zaokrąglanie:
00 - do liczby najbliższej
01 - w dół
10 - w górę
11 - w kierunku zera
Przyczyny przerwania:
PE - precission - utrata dokładności
UE - underflow - niedomiar
OE - overflow - nadmiar
ZE - zero divide
DE - denormalized operand - argument w postaci niunormowanej
IE - invalid operation - błędna operacja
Wszystkie przerwania mogą być maskowane (wyłączone) przez użytkownika
Lista rozkazów:
- przesłań (wymiany danych)
- arytmetyczne
- porównania i testowania
- wykonywanie funkcji przestępnych (new!)
- ładowanie stałych (new!)
- operacje sterujące
Cyfrówka - wykład 7 (7. kwiecień 2003)
Lista rozkazów koprocesora - uzupełnienie:
- rozkazy przesłań
- rozkazy arytmetyczne
- porównywanie i testowanie
- funkcje przestępne - gotowe rozkazy do wyznaczania wartości funkcji, np. trygonometrycznych:
FPTAN FPATAN F2XM1 (2x-1) FYL2X (ylog2x) FYL2XP1 (ylog2(x+1))
- ładowanie stałych - np. dla liczby Π - określona precyzja liczby, np.:
FLD2 (0) FLDPI (Π) FLDL2E (log2e) FLD1 (1) FLDL2T (log210)
- sterowanie
Układy I/O (WE/WY) procesora 8051
Port szeregowy - wprowadzenie i wyprowadzenie danych szeregowo w czasie - w kolejnych taktach zegara, kolejno „bit po bicie”. Co najmniej 3 przewody - we, wy, GND (masa)
bufor szyny danych - pośredniczy w wymianie danych (magazynowanie), zamiana postaci danych z równoległej na szeregową
bufor nadajnika - tu jest gromadzone słowo do wysłania i wysyłane bit po bicie przez linię TxD razem z informacją zabezpieczającą
sterowanie nadajnika - powoduje właściwą transmisję
TxC - przebieg taktujący pracę nadajnika
TxE i TxRDY - świadczą o gotowości nadajnika
TxE - Transmiter Empty - ustawia się później, gdy nadajnik skończy pracę
TxRDY - ustawia się wcześniej niż TxE
bufor odbiornika - RxD - dane odbierane poprzez bufor szyny danych do systemu
RxC - taktowanie, RxRDY - gotowość odbiornika, SYNDET - linia nadzorująca transmisję synchroniczną
Tryby pracy:
+ tryb asynchroniczny - nie oznacza braku sygnału taktującego (jest zegar)
+ tryb synchroniczny
Asynchroniczny:
- musi być to samo taktowanie,
- dane obudowywane ramką - wymagana taka sama budowa ramek w nadajniku i odbiorniku
bity startu |
|
(opcja) |
bity stopu |
1 |
dane |
|
1, 1 ½, 2 |
|
5,6,7,8 bitów |
bit parzystości |
|
Między grupami danych mogą wystąpić dowolnie długie przerwy.
Strona odbiorcza szuka bitów startu
Tryb synchroniczny
Zmienia się ramka, kształt umowny
słowo synchronizacji |
dane (słowo danych) |
część kontrolna |
Słowo synchronizacji - w odbiorniku i nadajniku musi być ustawione tak samo; jedno - monosynchron., dwa - bisynchron.
Wysłanie słowa, później sygnał, że słowo jest prawidłowo rozpoznane (zgłasza to SYNDET)
Dla trybu synchronicznego dalej są zaczepiane dane, część kontrolna, dane, cz. kontrolna itd.
Dla trybu bisynchronicznego: słowo synchron., dane, cz. kontrolna, słowo synchr.2, dane, cz. kontrolna, itd.
Przez cały czas transmisji danych linia SYNDET jest aktywna - dane przychodzą prawidłowo
Wielomiany - to, co wyjdzie przez dzielenie danych przez ten wielomian to część kontrolna
Np. CRC16 ma wielomian x16+x15+x2+1
W celu zawieszenia transmisji układ wysyła słowo synchronizacji
Port szeregowy w 8051
W 8051 mamy jeden port szeregowy obsługiwany 2 rejestrami:
- SCON - rejestr sterujący, opisuje warunki pracy portu szeregowego
- SBUF - rejestr danych
SCON:
9F |
9E |
9D |
9C |
9B |
9A |
99 |
98 |
SM0 |
SM1 |
SM2 |
REN |
TB8 |
RB8 |
TI |
RI |
MSB |
|
|
|
|
|
|
LSB |
SM0, SM1 - definiują tryb pracy portu:
SM0 SM1 = 00 - tryb zerowy transmisji, tryb synchroniczny, znaki 8-bitowe, taktowane fXTAL/12, bez części kontrolnej i słowa synchronizacji, prędkość wysyłania/odbioru danych = 1/12 taktu zegara
SM0 SM1 = 01 - tryb 1, asynchroniczny, znaki 8-bitowe, szybkość określona programowo (za szybkość odpowiada licznik T1), budowa ramki:
bit startu |
8 bitów danych |
bit stopu |
SM0 SM1 = 10 - tryb 2, asynchroniczny, znaki 9-bitowe, szybkość fXTAL/64 lub fXTAL/32, ramka:
|
|
TB8/RB8 ↓ |
|
bit startu |
8 bitów danych |
|
bit stopu |
|
|
↓ RB8 |
|
Bity TB8/RB8 to 9. bit danych, który można ustawić jako bit parzystości
SM0 SM1 = 11 - tryb 3, asynchroniczny, znaki 9-bitowe, licznik T1 określa prędkość transmisji
Bit SM2 - bit sterujący - akceptacja danych z potencjalnym błędem (ustawiony na 1):
- jeśli RB8=0 to ramki odrzucane (SM2=0)
- jeśli SM2=1 - ramki akceptowane, nawet jeśli RB8=0
REN - programowe wł/wył odbiornika
Układ czasowo - licznikowy
Odmierzanie określonego odcinka czasu i sygnalizacja o tym, niezależnie od obciążenia procesora
- rejestr słowa sterującego - tu są wpisywane słowa określające zachowania układu
- CLK - wejście sygnału zegarowego
- GATE - sygnalizacja upływu czasu te linie pozwalają na programowe sterowanie pracą licznika
- OUT
Liczniki są negatywne - zliczają „w dół” - zmniejszają swój stan o 1
2 tryby: - liczniki binarne
- liczniki dziesiętne (w kodzie BCD)
Stałe definiujące prace liczników są 16-bitowe
Mamy 6 trybów pracy liczników
Cyfrówka - wykład 8 (14. kwiecień 2003)
Tryby pracy liczników
Tryb 0
+ akcja jednokrotna
+ podanie nowej stałej nie powoduje zmiany w procesie odliczania (chyba, że linia GATE się zmieni z 0 na 1)
+ przerwanie po procesie odliczania
+ linia GATE może wstrzymać odliczanie na pewien czas
Tryb 1
+ układ do generowania impulsu o określonej szerokości
+ zapisanie stałej nie powoduje automatycznego włączenia
+ włączenie powoduje przejście linii GATE z 0 na 1, wtedy na OUT pojawia się 0, co inicjuje proces zliczania
+ pod koniec linia OUT =>1 i tak pozostaje
+ tryb jednokrotny
+ linia GATE z 1 na 0 - nic się nie dzieje, z 0 na 1 (powrót) - reset licznika
+ podanie nowej stałej nie powoduje zmiany w procesie odliczania (chyba, że linia GATE się zmieni z 0 na 1)
Tryb 2 (dzielnik częstotliwości)
+ wpisujemy stała, rusz odliczanie (niezależnie od linii GATE). Po zakończeniu zliczania, na OUT jest 0
+ repetycja - stan 0 na OUT na 1 impuls CLK. Opisanie nowej stałej - reakcja od nowego cyklu odliczania
+ w trakcie pracy - GATE z 1 na 0 - wstrzymanie (OUT ⇒ 1), zawieszenie aż GATE ⇒ 1, wtedy wznowienie od bieżącej wartości stałej
Tryb 3 (generator fali prostokątnej - autorepetycja)
+ na podstawie sygnału na WE (CLK) jest generowany przebieg prostokątny o innej częstotliwości. Wartość stałej/2 powoduje wyznaczenie nowego przebiegu. Jeśli stała jest nieparzysta - zero trwa krócej, 1 jest o jednostkę dłuższa
+ linia GATE nie wpływa na pracę
Tryb 4 (generowanie pojedynczego impulsu strobującego)
+ odliczanie do 0 - na jeden takt - koniec
+ linia GATE jest niepotrzebna, tryb rusza po wpisaniu stałej
+ linia GATE może ingerować (jeśli zmieni się na 0) - wstrzymanie odliczania. GATE ⇒ 1 - wznowienie odliczania
+ tryb jednokrotny, bez repetycji
Tryb 5 (modyfikacja trybu 4 - inaczej się uruchamia)
+ GATE potrzebna do uruchomienia procesu (z 0 na 1)
+ jeśli GATE później przechodzi z 0 na 1 - reset
Układy czasowo - licznikowe w 8051
1
17
PC
?
?
PC
Wyszukiwarka