Składanie ruchów harmonicznych: a) ta sama częstość. |
gdzie:
|
Suma ruchów n-harmonicznych:
|
b) dwa przebiegi harmoniczne o różnych częstościach drgań własnych i różnych przesunięciach fazowych: 1. a1<a2 i ω1<<ω2. Drgania wypadkowe: |
2. a1>a2 i ω1<<ω2 |
3. ω1 i ω2 różnią się o niewielki przyrost Δω: Oznaczmy: |
|
|
c) stosunek częstości dwóch przebiegów harmonicznych jest pewną liczbą naturalną: |
ϕ=π/2 |
Analiza harmoniczna: Każdy przebieg okresowy możemy rozłożyć na szereg składowych harmonicznych. Analiza opiera się na przedstawieniu dowolnego przebiegu okresowego za pomocą szeregu Fouriera: |
|
|
Układanie równań ruchu: a) metoda oparta na prawie zachowania energii (metoda Rayleigha). Można ją stosować tylko do układów autonomicznych, w których mamy do czynienia ze stałością energii:
b) metoda Newtona: |
c) metoda d'Alemberta:
d) równanie Lagrange'a II rodzaju: Qj - uogólniona siła zewnętrzna Rj - uogólniona siła tłumienia |
Siły w ruchu drgającym: |
b) siły sprężyste: |
Siły zależne od prędkości nazywamy siłami oporu. Są one zwykle skierowane przeciwnie do ruchu ciała. Rozpraszają energię powodując zanikanie ruchu. Niekiedy są skierowane zgodnie z ruchem ciała i wtedy mówimy o tzw. drganiach samowzbudnych. Najczęściej w układach liniowych mamy tłumienia wiskotyczne: Siły zależne od czasu nazywamy siłami |
wymuszającymi. Rodzaje: a) siły harmoniczne o stałej amplitudzie: |
c) wymuszenie kinematyczne:
|
d) wymuszenie impulsowe. |
Klasyfikacja drgań: 1. Drgania układów o 1 st swobody, 2. O wielu st swobody, 3. Drgania układów ciągłych (o nieskończenie wielkiej liczbie stopni swobody). 1. drgania swobodne (brak siły wymuszającej), 2. Drgania samowzbudne. 3. Drgania wymuszone. 1. Nietłumione, 2. Tłumione. Oraz drgania parametryczne - parametry układu zmieniają się okresowo w czasie (np. sztywność), drgania liniowe i nieliniowe. |
Drgania liniowe o 1st swobody: Gdzie: |
|
|
Drgania swobodne o 1st swobody z tłumieniem:
Podstawiamy x", x' i x, oraz: |
|
1. przypadek: h<ω0 p>0 tłumienie podkrytyczne: podst. |
|
2. h=ω0=hkr Drgania krytyczne p=0
|
3. Drgania nadktytyczne h>ω0
|
Logarytmiczny dekrement tłumienia: wyraża sobą miarę tłumienia w układzie:
|
Drgania wymuszone: |
|
Aby uniknąć drgań 1 i 2 stałe C1 i C2 muszą być jednocześnie równe 0. Prowadzi to do następujących war. Pocz. |
Dla ϕ=0
Dla ϕ=π/2 |
Współczynnik uwielokrotnienia amplitudy - stosunek amplitudy siły wymuszającej działającej w sposób statyczny do ugięcia statycznego (λst=q/ω02). Dla 2 przypadku: |
Dla przypadku 3: |
|
Drgania wymuszone z tłumieniem: |
|
|
|
Wymuszenie bezwładnościowe:
|
|
|
Wymuszenie kinematyczne: |
Amortyzacja drgań: zniwelowanie skutków oddziaływania drgań.
1. przypadek - ochrona otoczenia od drgań układu: |
|
|
b) ochrona układu od drgań pochodzą-cych z otoczenia: W tym przypadku chcemy ochronić maszynę przed oddziaływaniem środowiska. Warunki optymalizacji zostają dokładnie takie same jak w przypadku a). Zależności na przebieg współczynnika amortyzacji są identyczne. |
|
|
Doświadczalne określenie amplitud i przyspieszeń: Doświadczalny pomiar pozwala określić zakresy niebezpiecznych częstości, dużych amplitud w ruchu drgającym. Gdy drgania wykorzystywane są w sposób pasożytniczy pomiar pozwala określić optymalne zakresy prac urządzenia. a) pomiar parametrów, gdy badamy drgania względem nieruchomego układu rejestrującego: |
b) badanie drgań względnych obiektu drgającego i czujnika drgań: Masa przemieszcza się o x, obiekt drgający o s. Przemieszczenie względne y=x-s. |
|
|
|
Widać z przebiegu Ba, że przyrząd sejsmiczny do pomiaru przemieszczeń powinien mieć częstość drgań własnych znacznie mniejszą od częstości drgań mierzonych. Jeżeli rozwiązanie tego równania przedstawimy w postaci: |
|
Przyrządy sejsmiczne do pomiaru przyspieszeń powinny być tak skonstruowane, aby ich częstość własna była wielokrotnie wyższa od częstości drgań mierzonych.
|
Badania drgań na płaszczyźnie (przestrzeni) fazowej: badania topolo-giczne - na płaszczyźnie prędkość w fun-kcji przemieszczenia. Aby otrzymać ró-wnanie w formie potrzebnej do badania rozwiązania na płaszczyźnie fazowej sprowadzamy go do równania I stopnia. Trajektoria fazowa - miejsce geometry-czne wszystkich punktów odwzorowu-jących krzywą całkową równania |
jest linią zamkniętą - cykl graniczny. Styczna do trajektorii fazowej tworzy pewien kąt którego |
Ogólne równanie ruchu: |
funkcji: |
Po rozwinięciu i porównaniu wyrażenia z x i v w liczniku i mianowniku: |
|
|
Każdej wartości c odpowiada jedna trajektoria fazowa. Jej charakter zależy od lambd.
a) λ1≠λ2 - rzeczywiste, jednakowe znaki , gdy |
|
B) λ1≠λ2 - rzeczywiste, mają przeciwne znaki, gdy (b-c)2 +4ad>0 i bc-ad<0. Punkt osobliwy - siodło (niestateczne). |
c) λ1 λ2 - zespolone, ale żadna z nich nie jest ani czysto rzeczywista, ani czysto urojona. (b-c)2 +4ad<0 i b+c≠0. Otrzymujemy ognisko. B+c<0 stateczne, b+c >0 niestateczne. |
d) sprzężone, czysto urojone: (b-c)2 +4ad<0 i b+c=0. Środek lub centrum. Trajektorie fazowe są krzywymi zamkniętymi okrążającymi punkt osobliwy. |
Zachowanie energii w drganiach liniowych:
Każda trajektoria fazowa jest krzywą stałej energii mechanicznej. Minima-
|
|
lnej wartości energii potencjalnej odpo-wiada stateczne położenie równowagi. Pewnej wartości Ep=C1 odpowiada określona amplituda drgań a1.
Dla układów nieliniowych: |
Ep - energia potencjalna odniesiona do jednostki masy, h - energia mechaniczna układu.
|
Jeżeli ekstremum energii potencjalnej to minimum, punkt osobliwy jest środkiem (centrum). Jeżeli maksimum to punkt osobliwy siodło (niestateczne). |
Drgania nieliniowe: nie jest prawdziwa zasada superpozycji (złożenie wypadko-wego przebiegu z kilku przebiegów po-wstałych pod działaniem np. sił wymu-szających nie jest przebiegiem rzeczy-wistym w rozpatrywanym układzie). Rozwiązanie zależy bardzo silnie od warunków początkowych. Przy jednej danej częstości siły wymuszającej może wystąpić kilka rezonansów, mogą wystąpić drgania będące ułamkiem częstości siły wymuszającej, a także |
drgania o częstościach będących krotnością częstości siły wymuszającej. Mimo nie istniejącego tłumienia mogą się pojawić drgania o skończonej wartości - drgania samowzbudne.
Metoda ścisła Ek+Ep=const: S(x) - nieliniowa siła sprężysta: |
|
rozwiązanie przez całkowanie za pomocą funkcji eliptycznych lub metodami numerycznymi.
Metoda małego parametru (swobodne) |
Metoda mał. Parametru (wymuszone)
|
Przykładowy przebieg krzywej rezonansowej dla drgań nieliniowych wymuszonych: Przy 1 stosunku ni/omega możliwe są drgania o 1 amplitudzie, przy drugim o dwóch, przy trzecim o trzech. To jakie drgania powstaną zależne jest od warunków początkowych przed włączeniem siły wymuszającej. Gdy stan układu jest w położeniu A to siła wymuszająca wywoła drgania o amplitudzie B1. Gdy był w stanie C to amplituda wzrośnie do B1. |
Gdy był w D lub E to amp B3. Drgania B1 i B3 są stateczne. Drgania B2 można wywołać tylko przez specjalny dobór war pocz. Dla drgań tłumionych: |
|
Zjawisko zeskoku: Jeżeli w badaniach układu nieliniowego doświadczalnie odtworzymy krzywą rezonansową zmie-niając częstości wymuszenia to kolejne stany drganiowe ustalą się kolejno przez punkty ABCDE. Przy dalszym zwiększaniu częstości nastąpi przeskok do punktu F i związana z tym zmiana amplitudy. Dalej amplituda zmieniać się będzie po krzywej FG. Gdy będziemy zmieniać częstości wymuszenia od większych (G) to w H nastąpi przeskok |
|
do I i dalej amplituda zmieniać się będzie wzdłuż ICBA. Odcinek HE jest praktycznie nie do zrealizowania ze względu na niestateczność tych drgań. |
Drgania swobodne o 2 st swobody: |
|
|
Jeżeli a/b<0 to masy drgają przeciwbieżnie. |
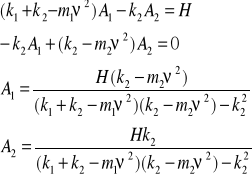
Drgania wymuszone o 2 st swobody: |
Rozwiązanie szczególne:
różniczkujemy i podstawiamy do układu równań. Otrzymujemy: |
|
|
|
W przypadku gdy ν=ω1=ω2 wtedy μ1=0. Całkowity zanik drgań ciała o masie m1. Jest to tłumienie dynamiczne. Tłumik wykonuje następujący ruch: |
Reakcja sprężyny jest równa co do wartości sile wymuszającej i ma zwrot przeciwny. Wady: drgania ciała 1 tłumione są do 0, praktycznie tylko dla jednej częstości siły wymuszającej. Tłumik jest mało efektywny. Po wprowadzeniu elementu tłumiącego między ciałami to równania ruchu:
|
Następuje wyraźne złagodzenie rezonansu. Nie następuje tłumienie do zera. Można tak dobrać punktu P i Q aby styczne do krzywych rezonansowych |
w tych punktach były poziome. Występuje wtedy najsilniejsze złagodzenie rezonansu w szerokim zakresie częstości siły wymuszającej. Tłumik dynamiczny można nastroić na dwa sposoby: a) przy sile wymuszającej o stałej częstości stosuje się małe tłumienie, które eliminuje rezonans główny i prowadzi do warunku ν=ω1=ω2 spełnionego w przybliżeniu. B) wartość siły wymuszającej zmienia się w pewnym zakresie lub istnieje możliwość |
występowania sił wymuszających o różnych częstościach stosujemy tłumik o większym współczynniku tłumienia i dobieramy parametry tak, aby uzyskać obniżenie amplitudy drgań ciała głównego w szerokim zakresie częstości. |
Drgania układów ciągłych: a) równanie drgań struny: zakładamy: poprzeczne wymiary są znikomo małe, może wykonywać ruchy poprzeczne. |
|
|
b) równanie drgań podłużnych pręta: pręt jednorodny, o stałym przekroju. Przekroje pozostają płaskie. |
|
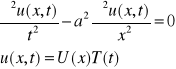
Problem brzegowy: |
Spełnienie tej zależności dla każdego t i x jest możliwe tylko wtedy, gdy obie strony równania będą stale równe stałej wielkości:
|
|
War brzeg. u(0,t)=0 oraz U(0,t)=U(0)T(t)=0 oraz |
|
Rozwiązanie na U(x): |
|
|
|





















Wyszukiwarka