|
Zmiana prędkości:
Cewki połączone szeregowo 1-1-1, 2-2-2, 3-3-3
3 cewki - 3 razy wolniej
( |
![]()
wektory przestrzenne prądów (space vector) 

![]()
space-wektory strumieni sprzężonych
![]()
|
|
na biegu jałowym ![]()
rozruch ![]()
Stan ustalony Symetryczny sinusoidalny:
układ odniesienia synchroniczny (wiruje z prędkością ![]()
)

... /wzór Eulera ![]()
/

skuteczne
Wniosek: ![]()
W stanie ustalonym:
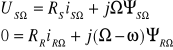

![]()
![]()
- poślizg
|
|
Maszyna stoi ![]()
Wiruje synchronicznie ![]()
![]()
- poślizg znamionowy
Ze schematu wyliczamy ![]()
i podstawiamy do ![]()
(bo wzór jest słuszny w każdym układzie odniesienia)
Wzór Klossa: 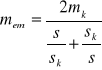
- od strony wirnika
![]()
- poślizg krytyczny![]()
![]()
- Xzwarcia od strony wirnika ![]()
Identyfikacja parametrów:
1) bieg jałowy ![]()
![]()
- straty w żelazie
|
|
2) pomiar zwarcia (przy zablokowanym wirniku)
|
Mierzymy:
|
|
|
|
|


|
Skokowa regulacja
gdy możemy zmieniać liczbę biegunów p (poprzez dwa oddzielne uzwojenia na wirniku) |
3
Luke ELEKTROTECHNIKA-wykład 26.3.2k+2
#
Wyszukiwarka