C. MASZYNY INDUKCYJNE (ASYNCHRONICZNE)
1. Zasada działania, budowa, poślizg, napięcia indukowane w różnych stanach pracy.
Maszyna indukcyjna - maszyna, w której napięcie do obwodu wirnika nie jest doprowadzane z zewnątrz lecz pojawia się w wyniku indukcji.
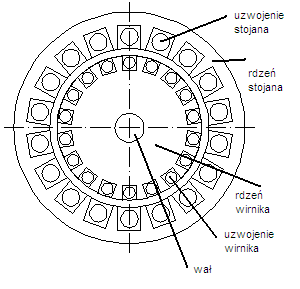
Budowa:
- nieruchomy stojan
- wirujący wirnik
- obwód magnetyczny (rdzeń z żelaza w formie pakietu z blach)
- obwód elektryczny (uzwojenie wykonane z drutu nawojowego lub prętów)
- szczelina między stojanem i wirnikiem jak najcieńsza.
- elementy konstrukcyjne (obudowa, chłodzenie)
Rodzaje budowy:
- pierścieniowe - uzwojenie wirnika wykonane z drutu nawojowego z połączonymi pierścieniami ślizgowymi, które umożliwiają włączenie w obwód wirnika urządzeń rozruchowych i regulayjnych.
- klatkowe - uzwojenie wirnika wykonane z prętów. Wystające z rdzenia pręty łączy się po obu stronach pierścieniami zwierającymi tworząc klatkę. Klatkę można traktować jako uzwojenie trójfazowe o liczbie faz równej liczbie prętów.
Zasada działania:
Zasilenie stojana trójfazowym prądem powoduje powstanie wirującego kołowa pola magnetycznego z prędkością ![]()
(f1 - częstotliwość zasilania, p - liczba par biegunów). Wirujące pole przecina uzwojenie nieruchomego wirnika powodując indukowanie się w nim napięcia oraz przepływ prądu. Wskutek oddziaływania pola na przewód z prądem powstanie moment elektromagnetyczny. Jeżeli osiągnie on wartość większa od momentu obciążenia to wirnik zacznie się obracać zwiększając swoją prędkość obrotową. Maszyna pracuje jako silnik przetwarzając energie elektryczną na mechaniczną. Wirnik podąża za obracającym się polem stojana wirując w kierunku zgodnym z kierunkiem wirowania pola dążąc do osiągnięcia prędkości synchronicznej. Osiągnięcie tej prędkości spowodowałoby, że ustałoby przecinanie uzwojenia wirnika przez pole stojana, nie indukowałoby się napięcie i nie popłynąłby prąd uzwojeniu, nie powstałby moment elektromagnetyczny. O wartości napięcia indukowanego w prętach wirnika i o wartości płynącego prądu decyduje prędkość przecinania tych prętów przez linie pola magnetycznego. Im jest ona większa tym większą wartość mają napięcia i prądu. Prędkość ta to poślizg.
Poślizg - względna prędkość wirującego pola względem wirnika odniesiona do prędkości synchronicznej: ![]()
.
Ponieważ pole stojana i wirnika wirują z różnymi prędkościami, różnić się będzie również częstotliwość wirowania tych pól: ![]()
. W maszynie asynchronicznej występują dwa obwody elektryczne sprzężone ze sobą magnetycznie, pracujące przy różnych częstotliwościach, przy czym w obwodzie wirnika częstotliwość ulega zmianom przy zmianie obciążenia lub zmianie rodzaju pracy.
Napięcia indukowane w różnych stanach pracy:
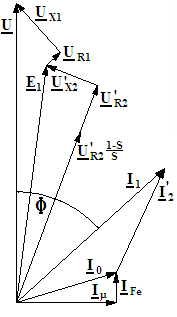
- napięcie przy nieruchomym wirniku: ![]()
- napięcie w uzwojeniu twornika: ![]()
- napięcie w wirniku przy dowolnej prędkości: ![]()
Stany pracy maszyny asynchronicznej:
- hamulec n<0 s>1
- transformator n=0 s=1
- silnik 0<n<1 1>s>0
- idealny bieg jałowy n=n1 s=0
- prądnica n>n1 s<0
2. Równanie przepływów (smm, napięć magnetycznych), sprowadzenie prądów strony wtórnej do strony pierwotnej.
Równanie przepływów:
Amplituda przepływu uzwojenia wirnika: ![]()
Amplituda przepływu uzwojenia stojana: ![]()
Amplituda przepływu wypadkowego: ![]()
Równanie przepływu: ![]()
; ![]()
Sprowadzenie prądu strony wtórnej na stronę pierwotną: 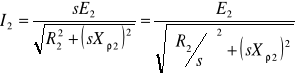
Gdzie: R2 - rezystancja uzwojenia wirnika; Xρ2 - reaktancja rozproszenia wirnika
![]()
gdzie: ![]()
- przekładnia prądowa (m - liczba faz)
3. Schemat zastępczy, zasady sporządzania, interpretacja parametrów.
Równania maszyny asynchronicznej:
![]()
![]()
![]()
Schemat zastępczy z obwodem wirnika sprowadzonym na stronę stojana
Schemat zastępczy uwzględnia działanie przede wszystkim działanie strumienia głównego Ф, który indukuje napięcie E1 w uzwojeniu stojana oraz E2 w uzwojeniu wirnika. Strumieniom rozproszenia odpowiadają reaktancje rozproszenia stojana XS1 oraz wirnika XS2. R1 oraz R2 są to rezystancje uzwojeń odpowiednio stojana oraz wirnika. RFe - straty w rdzeniu stojana, Xμ - reaktancja obwodu prądu magnesującego.
Sprowadzenie napięć:
![]()
gdzie: ![]()
- przekładnia napięciowa
Sprowadzenie prądów:
![]()
gdzie: ![]()
- przekładnia prądowa (m - liczba faz)
Sprowadzenie rezystancji i reaktancji:
![]()
![]()
Schemat zastępczy jest schematem obwodu złożonego z rezystancji i reaktancji dobranych tak, aby zjawiska zachodzące w tym układzie odpowiadały w przybliżeniu zjawiskom zachodzącym w maszynie.
4. Wykres wskazowy.
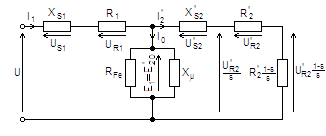
Schemat zastępczy maszyny synchronicznej przy zwartym obwodzie wirnika (pytanie 4) i wykres wskazowy przy pracy silnikowej:
![]()
- napięcie doprowadzone do stojana
![]()
- prąd jałowy
![]()
- prąd w stojanie
![]()
- prąd w wirniku odniesiony do stojana ![]()
![]()
- spadek napięcia na reaktancji rozproszenia
![]()
- spadek napięcia na rezystancji stojana
![]()
- napięcie indukowane
![]()
- rzeczywisty spadek napięcia na rezystancji wtórnika odniesiony do obwodu stojana
![]()
- spadek napięcia nieruchomego wirnika odniesiony do stojana
![]()
- spadek napięcia odniesiony do obwodu stojana odpowiadający mocy mechanicznej
5. Stan jałowy i stan zwarcia.
Stan jałowy - stan pracy, w którym uzwojenie wirnika jest zamknięte, do uzwojenia stojana doprowadzamy napięcie a wał nie jest obciążony żadnym momentem. Wirnik wiruje z prędkością zbliżona do synchronicznej - bardzo mały poślizg. W stojanie płynie prąd składający się z prądu wirnika odniesionego do stojana, z prądu magnesującego (biernego) oraz prądu czynnego odpowiadającego stratom w rdzeniu. Moc oddawana przez silnik jest równa zeru, więc moc pobierana w całości idzie na pokrycie strat: w uzwojeniu stojana, w rdzeniu stojana, mechanicznych: ![]()
.
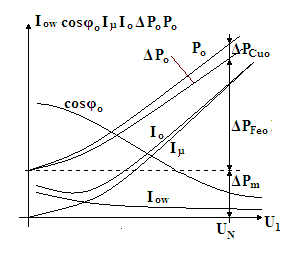
Charakterystyki stany jałowego:
![]()
- moc pobierana
![]()
- straty jałowe, które nie zależą od obciążenia
![]()
- straty w uzwojeniu stojana
- straty w stali stojana
![]()
- straty mechaniczne
![]()
- prąd jałowy
![]()
- prąd magnesujący bierny
![]()
- prąd czynny
![]()
- współczynnik mocy
Znaczny prąd jałowy (w porównaniu ze znamionowym) i mały współczynnik mocy stanowią wady silnika asynchronicznego. Pobierana przez silnik moc bierna blokuje źródła zasilania i sieć zasilającą. Przyczyną poboru dużego prądu jałowego jest szczelina powietrzna w obwodzie magnetycznym przez którą przechodzi strumień główny. Im jest ona grubsza tym większy jest prąd jałowy.
Stan zwarcia - uzwojenia nieruchomego wirnika jest zwarte, do stojana doprowadzone jest napięcie. Pobierana przez maszynę moc elektryczna w całości zamieniana jest na ciepło. Moc mechaniczna nie jest wydalana ponieważ wirnik się nie obraca. Całkowita pobrana moc idzie na pokrycie strat obciążeniowych w uzwojeniu stojana i wirnika: ![]()
.
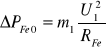
Charakterystyki stanu zwarcia:
Napięcie zwarcia - napięcie jakie należy doprowadzić do jednej ze stron oby przy zwarciu uzwojenia drugiej strony i nieruchomym wirniku otrzymać prąd znamionowy po stronie zasilanej
Prąd zwarcia - jest to prąd jaki pobiera maszyna w stanie zwarcia, gdy zasilimy ją napięciem znamionowym.
W maszynach asynchronicznych stan zwarcia występuje w chwili początkowej przy każdorazowym rozruchu (n=0)
Zależność pomiędzy prądem zwarciowym IZ, prądem znamionowym IN, i napięciem zwarcia uz%: ![]()
.
Pomiar prądu zwarciowego jest trudny ze względu na grzanie się maszyny i niezbędną moc źródła zasilania, dlatego pomiary przeprowadza się przy obniżonym napięciu zasilania. W maszynach asynchronicznych stan zwarcia występuję każdorazowo podczas rozruchu maszyny.
6. Bilans mocy i sprawność (wykres Sankey`a).
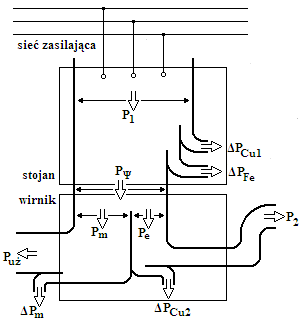
![]()
- moc pobierana z sieci zasilającej
![]()
- straty mocy w uzwojeniu stojana
![]()
- straty mocy w rdzeniu stojana
![]()
- moc elektromagnetyczna - przekazywana ze stojana do wirnika za pośrednictwem wirującego pola magnetycznego. Dzieli się ona na moc elektryczną i mechaniczną: ![]()
.
![]()
- moc użyteczna - wydawana do napędzanej maszyny ![]()
- straty mechaniczne
![]()
- straty w uzwojeniu wirnika
![]()
- moc elektryczna wirnika
![]()
- moc wydawana do odbiornika
- straty w uzwojeniach związane są z ciepłem które wydziela się gdy przez przewód czy uzwojenie płynie prąd
- straty w rdzeniu (żelazie) powstają w wyniku nagrzewania się materiału ferromagnetycznego poddanego działaniu zmiennego pola magnetycznego. Dzielą się na straty z histerezy i wiroprądowe.
Maszyny asynchroniczne należy konstruować tak aby pracowały przy możliwie najmniejszym poślizgu. Wynika to następujących zależności:
![]()
![]()
![]()
Im mniejszy poślizg przy pracy znamionowej tym mniejsze są straty w wirniku a większa część mocy wirującego pola zmienia się w moc mechaniczną, zatem wzrasta sprawność silnika: ![]()
7. Elektromagnetyczny moment obrotowy.
Moment obrotowy jest to pojęcie określające wydajność obrotową wirnika. Każdy silnik ma swój maksymalny moment obrotowy. Obciążenie powyżej tej wartości oznacza, że silnik nie będzie w stanie wykonywać ruchu wirowego. Przy normalnym obciążeniu silnik pracuje najczęściej poniżej maksymalnej wartości momentu obrotowego, jednakże faza rozruchu wywołuje dodatkowe obciążenie. Moment elektromagnetyczny maszyny asynchronicznej wytworzony przez strumień ![]()
w przestrzennym rozkładzie pola i gęstość liniową prądu ![]()
wyznaczamy ze wzoru: ![]()
. Moment możemy wyznaczyć również w znając moc mechaniczną i prędkość obrotową wirnika: ![]()
{Prędkość kątowa wirnika: ![]()
}. W praktyce bardziej przydatna jest zależność między momentem użytecznym na wale a mocą oddawaną. Mimo iż moment użyteczny równi się od momentu elektromagnetycznego o moment tarcia, a moc użyteczna od mechanicznej o straty mechaniczne, zależność ta jest określana podobnie: ![]()
.
8. Moment i poślizg krytyczny.
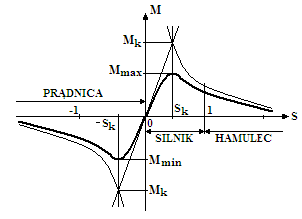
Badając przebieg zmienność funkcji M=f(s) przy U1=const i f1=const oraz przyrównując do zera pierwszą pochodną ![]()
funkcja ma dwa ekstrema przy poślizgach nazywanych krytycznymi: ![]()
.
Moment krytyczny jest to największa wartość momentu elekromagnetycznego w zakresie poślizgów ![]()
: 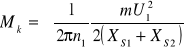
.
Poślizg krytyczny jest funkcją rezystancji obwodu wirnika, natomiast moment krytyczny zależy głównie od napięcia zasilania U1 oraz reaktancji rozproszenia obwodu stojana XS1 oraz wirnika XS2.
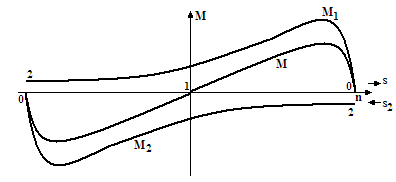
9. Wzór Kloss`a, wyznaczenie charakterystyki mechanicznej M=f(s).
Wartość momentu przy różnych poślizgach można obliczyć stosując wzór Klossa: 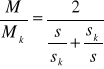
. Wzór ten określa zależność pomiędzy momentem wytwarzanym w maszynie, momentem krytycznym, poślizgiem i poślizgiem krytycznym.
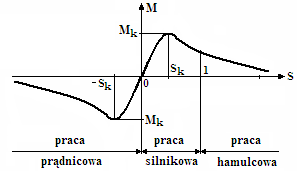
W zakresie 0<s<1 maszyna wytwarza dodatni moment elektromagnetyczny, a wirnik wiruje z prędkością dodatnią 0<n<n1 (zgodnie z kierunkiem wirowania pola magnetycznego). Maszyna pracuje jako silnik.
Dla poślizgów s>1 prędkość jest ujemna n<0 co oznacza, że wirnik wiruje z kierunku przeciwnym do kierunku wirowania pola magnetycznego, a mimo to moment elektromagnetyczny jest dodatni. Taka sytuacja występuje gdy wirnik będzie miał jakiś bodziec zewnętrzny obracający go w kierunku przeciwnym. Mamy wówczas do czynienia z pracą hamulcowa maszyny.
Dla poślizgów s<0 maszyna wiruje w kierunku zgodnym z kierunkiem wirowania pola ale z prędkością większą od synchronicznej n>n1. Wirnik jest napędzany z zewnątrz, a maszyna wytwarza ujemny moment elektromagnetyczny, co jest równoważne z oddawaniem energii do sieci - praca prądnicowa.
10. Charakterystyka mechaniczna M=f(s) i zależność jej przebiegu od parametrów uzwojeń.
Wpływ zmiany napięcia na przebieg charakterystyki momentu:
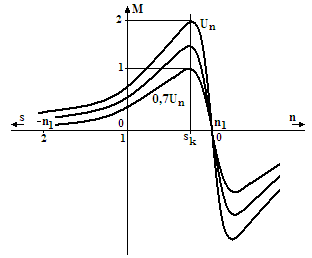
Porównując wartość momentu przy tym samym poślizgu i różnych napięciach zasilających można zauważyć wyraźny wpływ zmian napięcia U1 na przebieg charakterystyki momentu ponieważ zależy on od kwadratu napięcia: ![]()
przy s=const.
Jest to niekorzystne dla pracy maszyny, gdyż moment obrotowy użyteczny gwałtownie się zmniejsza przy obniżeniu napięcia zasilania co grozi zatrzymaniem się silnika.
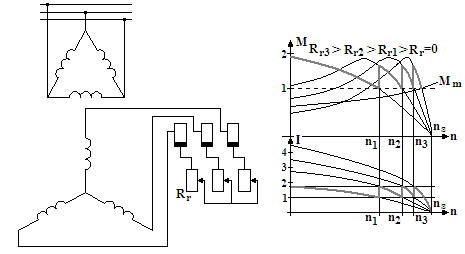
Wpływ zmiany rezystancji włączonej w obwód wirnika na przebieg charakterystyki momentu:
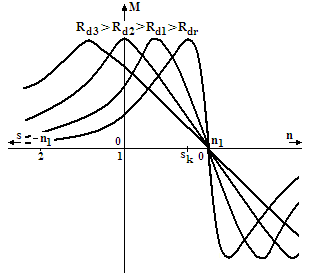
Moment krytyczny nie zależy od rezystancji obwodu wirnika, natomiast przy rezystancji dodatkowej poślizg krytyczny wynosi: ![]()
Rezystancja dodatkowa zapewnia maksymalny moment początkowy podczas rozruchu silnika. Zwiększenie rezystancji powoduje przesunięcie się poślizgu krytycznego na zakres pracy hamulcowej i odpowiednie zmniejszenie momentu.
Właściwości ruchowe maszyny charakteryzuje wartość największego momentu występującego przy zasilaniu napięciem znamionowym. Wartość tę określa się za pomocą stosunku momentu maksymalnego do momentu znamionowego, który nazywamy przeciążalnością silnika: ![]()
. Przeciążalność określa górną granicę obciążenia maszyny momentem. Po jej przekroczeniu silnik zatrzymuje się.
11. Momenty pasożytnicze (asynchroniczne i synchroniczne).
Momenty pasożytnicze są to momenty wytwarzane przez oddziaływanie na siebie przepływów wyższych harmonicznych, które mogą poważnie utrudniać lub wręcz nawet uniemożliwiać właściwą pracę maszyny.
Pole magnetyczne stojana i wirnika podstawowej harmonicznej są względem siebie nieruchome przy każdej prędkości wirnika. Moment wytworzony przez podstawową harmoniczną jest momentem asynchronicznym. Powstaje on przy dowolnej prędkości wirnika z wyjątkiem prędkości synchronicznej. Jest to cecha maszyn asynchronicznych, w których przepływ jednego z obwodów jest wywołany przez przepływ obwodu drugiego. Wartość momentu asynchronicznego, wytworzonego przez określoną harmoniczna zależy przede wszystkim od wartości przepływu stojana danej harmonicznej, na który istotny wpływ ma współczynnik uzwojenia kuυ: ![]()
- określa rząd wyższej harmonicznej przepływu, która przybiera największą wartość (największa wartość posiada harmoniczna rzędu: ![]()
). Udział momentów asynchronicznych wytwarzanych przez wyższe harmoniczne można zmniejszyć przez dobór odpowiedniego uzwojenia stojana (o małym współczynniku uzwojenia). Momenty pasożytnicze można dodatkowa zmniejszyć przez skośne wykonanie żłobków oraz powiększenie szczeliny między stojanem i wirnikiem.
Moment synchroniczny jest to moment występujący w przypadku wzajemnego oddziaływania dwu niezależnych od siebie przepływów (stojana i wirnika) o takich samych liczbach par biegunów, jeżeli są one względem siebie nieruchome. Wśród przepływów stojana i wirnika istnieją takie, które wirują względem siebie przy różnych prędkościach wirnika z wyjątkiem tej prędkości przy której przepływy te są względem siebie nieruchome. Przy tej prędkości powstaje moment synchroniczny. Momenty synchroniczne mogą występować przy różnych prędkościach, również przy nieruchomym wirniku. Momenty o znacznych wartościach mogą wystąpić dla tych harmonicznych, których przepływ stojana i wirnika przybiera największe wartości. Warunki sprzyjające powstawaniu momentów synchronicznych: ![]()
lub ![]()
. Przy niewłaściwym doborze liczby żłobków w stojanie i wirniku powstają siły naciągu magnetycznego o nierównomiernych rozkładzie na obwodzie maszyny i wirują wzdłuż obwodu stojana i wirnika. Pod wpływem działania tych sił powstają silne drgania i niepożądane efekty akustyczne.
12. Silniki dwuklatkowe i głębokożłobkowe.
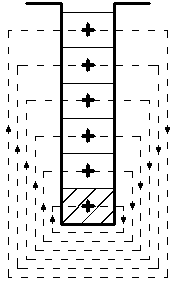
Silnik głębokożłobkowy - żłobek wirnika przyjmuje kształt, w którym stosunek szerokości do wysokości jest rzędu 1:10. Jeżeli przez pręt umieszczony w żłobku płynie prąd przemienny to powstaje strumień magnetyczny rozproszenia. Dolne warstwy pręta będą skojarzone z większym strumieniem rozproszenia niż górne. Wartość prądu płynącego w poszczególnych warstwach zależy od indukowanego napięcia i impedancji tej warstwy. Ponieważ we wszystkich warstwach napięcie indukowane jest takie samo, o rozpływie prądu decyduje impedancja warstwy. O wartości impedancji poszczególnych warstw decyduje:
- przy postoju lub przy bardzo małych prędkościach obrotowych reaktancja XS2>>R2
- przy prędkościach zbliżonych do znamionowych reaktancje można pominąć w stosunku do rezystancji R2.
Przy postoju silnika przez warstwy położone głębiej w żłobku płynie znikomo mały prąd, a przez warstwy górne duży prąd. Występuje zjawisko wypierania strug prądu ku górnym warstwom. Zjawisko to wykorzystywane jest przy rozruchu silnika. W początkowym okresie rozruchu prąd płynie wyłącznie przez górne warstwy - jest to równoznaczne ze zrostem rezystancji R2. Wzrost ten wpływa na wzrost momentu rozruchowego oraz na zmniejszenie prądu rozruchowego. Wzrost prędkości powoduje, że rozkład prądu staje się coraz bardziej równomierny, rezystancja R2 stopniowo maleje. Przebieg takiego zjawiska równoważny jest z włączeniem dodatkowej rezystancji w obwód uzwojenia wirnika w chwili uruchomienia i stopniowym jej zmniejszaniu w miarę wzrostu prędkości. Typowy silnik głębokożłobkowy odznacza się powiększonym momentem rozruchowym. Z tego względu stosowane są do pracy w ciężkich warunkach rozruchowych.
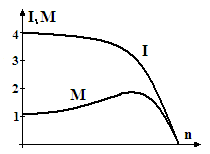
Charakterystyka momentu i prądu silnika głębokożłobkowego:
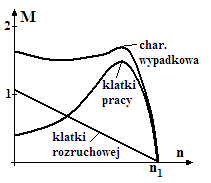
Charakterystyka mechaniczna silnika dwuklatkowego
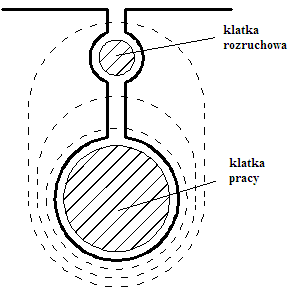
Silnik dwuklatkowy - zbudowany jest z klatki zewnętrznej (rozruchowej) wykonanej z prętów o znacznie mniejszym przekroju niż w klatce wewnętrznej (pracy). Klatka zewnętrzna, a małym przekroju ma dużą rezystancje, natomiast małą. Przepływający przez pręty prąd powoduje powstanie strumieni rozproszonych. Ze względu na małą reluktancje klatki wewnętrznej wokół niej zamknie się więcej linii pola niż wokół klatki zewnętrznej. Wynika stąd że reaktancja rozproszenia klatki pracy jest znacznie większa od reaktancji rozproszenia klatki zewnętrznej. W początkowym okresie rozruchu reaktancja klatki wewnętrznej jest tak duża, że płynie przez nią znikomo mały prąd w porównaniu z prądem płynącym w klatce zewnętrznej. Prąd płynie głównie przez klatkę zewnętrzną (rozruchową). W okresie rozruchu zostaje w sztuczny sposób powiększona rezystancja w obwodzie wirnika w skutek tego moment rozruchowy wzrasta, a prąd rozruchowy maleje. Zwiększenie prędkości powoduje, że prąd będzie płynął tylko przez klatkę wewnętrzną. Wzrostowi prędkości towarzyszy samoczynny zanik zjawiska wypierania prądu z klatki pracy, podobny do stopniowego wyłączenia rezystancji w silniku pierścieniowym.
13. Rozruch silników.
Rozruchem nazywamy stan pracy od chwili załączenia napięcia do osiągnięcia przez maszynę ustalonej prędkości, określonej parametrami zasilania (napięcie i częstotliwość) i obciążenia (moment hamujący). Rozruch silnika jest możliwy gdy występuje nadwyżka momentu wytworzonego przez silnik nad momentem obciążenia. Przy rozpatrywaniu rozruchu bardzo istotna jest wartość prądu rozruchowego (pobieranego z sieci), wartość momentu rozruchowego (rozwijanego przez silnik w czasie rozruchu) oraz czas trwania rozruchu.
Rozruch bezpośredni, polegający na zasileniu silnika pełnym napięciem znamionowym stosuje się tylko przy silnikach małych mocy. Dla silników większych mocy stosuje się różne sposoby poprawy warunków rozruchu silnika:
- zmniejszenie prądu rozruchowego
- zwiększenie momentu rozruchowego
Rozruch za pomocą rozrusznika (tylko dla silników pierścieniowych)
Polega na włączeniu w obwód uzwojenia wirnika nastawnej rezystancji zwanej rozrusznikiem. Zmiana rezystancji wpływa na zmianę momentu i prądu rozruchowego. Rozruch dokonuje się przy największej wartości rezystancji rozrusznika. Po osiągnięciu odpowiedniej prędkości obrotowej przełącza się rozrusznik na następny stopień aż do zwarcia rozrusznika. Przełączenia powinny następować w takiej chwili aby nie pojawił się prąd większy niż początkowy prąd rozruchowy. Przedwczesne przełączanie powodowałoby nadmierne uderzanie prądu i zwiększenie momentu obrotowego. Zbyt późne przełączanie wydłużyłoby czas trwania rozruchu. Im większa jest liczba stopni rozrusznika, tym płynniejszy i krótszy jest rozruch. Rozrusznik przeznaczony jest do pracy dorywczej lub przerywanej dlatego nie można używać go do pracy ciągłej (nadmierne nagrzanie i uszkodzenie).
Samorozruch silnika - przy krótkotrwałym lub znacznym obniżeniu napięcia następuje zmniejszenie prędkości obrotowej i silnikowi grozi utknięcie. Jeżeli czas trwania zaniku napięcia jest krótszy od czasu potrzebnego na zatrzymanie się od chwili wyłączenia silnika z sieci, to w określonych warunkach jest możliwe utrzymanie silnika w ruchu i w miarę wzrostu napięcia powrót do normalnego stanu pracy po pewnym czasie.
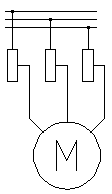
Rozruch silników klatkowych:
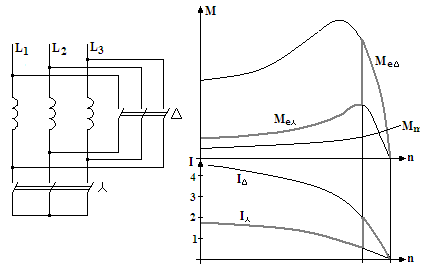
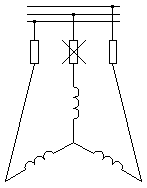
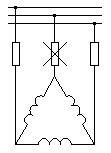
- za pomocą przełącznika gwiazda-trójkąt:
Silnik załącza się do sieci przy uzwojeniu stojana połączony w gwiazdę. Wirnik zaczyna wirować. W chwili, gdy ustali się prędkość obrotowa wirnika, uzwojenie przełączamy w trójkąt. Przy połączeniu w gwiazdę napięcie każdej fazy uzwojenia stojana jest ![]()
-krotnie mniejsze niż napięcie znamionowe. Prąd pobierany w tym stanie z sieci jest w przybliżeniu 3-krotnie mniejszy niż prąd płynący przy połączeniu w trójkąt. Podobnie moment rozruchowy jest również 3-krotnie mniejszy. Sposób ten stosuje się do rozruchów lekkich (silnik obciążony niewielkim momentem hamującym).
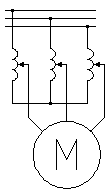
- za pomocą autotransformatora: - za pomocą rezystancji włączonej w obwód stojana:
14. Regulacja prędkości obrotowej.
Regulacja prędkości obrotowej jest możliwa przez zmianę:
- częstotliwości zasilania - zmniejszając częstotliwość regulujemy prędkość obrotową wirującego pola, w rezultacie regulujemy prędkość obrotową wirnika. Zmieniając częstotliwość należy również regulować napięcie U1 ponieważ przy stałej wartości napięcia zasilania wzrost częstotliwości powodowałby zmniejszenie się strumienia (wzrost prądu obciążenia). Metoda wymaga zastosowania dodatkowego źródła zasilania.
- liczny par biegunów - osiągamy stosując dwa niezależne uzwojenia w stojanie o różnych liczbach biegunów magnetycznych lub zastosować jedno uzwojenie, które można tak przełączać, aby wytwarzało pola o różnych liczbach par biegunów. Umieszczenie w stojanie dwóch niezależnych uzwojeń o różnych liczbach par biegunów umożliwia skokową regulacje prędkości obrotowej przez zmianę uzwojenia przyłączonego do sieci zasilającej. Otrzymuje się wówczas pole wirujące w obu przypadkach z różną prędkością synchroniczną. Moment obrotowy powstaje wówczas gdy liczba biegunów w stojanie i wirniku jest taka sama, dlatego regulacje tą stosuje się w silnikach klatkowych.
- rezystancji w obwodzie wirnika:
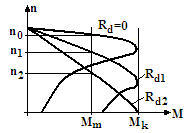
Powoduję zmianę przebiegu charakterystyki mechanicznej (przy U1=Conde). Jeżeli silnik pracuje ze zwartymi pierścieniami Rd=0 i napędza maszynę robocza o stałym momencie Mm niezależnym od prędkości obrotowej to po włączeniu rezystancji dodatkowej w obwód wirnika ustali się nowy punkt pracy przy zmniejszonej prędkości obrotowej wirnika. Dalszy wzrost rezystancji powoduje dalsze zmniejszanie prędkości. Prędkość regulujemy w dół od wartości znamionowej do dowolnie małej.
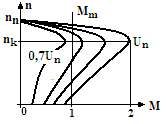
- napięcia zasilania stojana:
Zmniejszenie napięcia zasilania powoduje zmniejszenie wartości momentu maksymalnego przy stałym poślizgu krytycznym. Zmniejszenie napięcia z Un1 do 0,7Un1 spowoduje utknięcie silnika Mmax<Mm. Zakres regulacji jest bardzo mały (regulacja w dół w obszarze do sk). Zmniejszanie napięcia powoduje wzrost prądu w obwodzie wirnika i stojana. Regulacja ta jest rzadko stosowana.
- napięcia w obwodzie wirnika - należy dodatkową maszynę do obwodu wirnika maszyny asynchronicznej. Powstaje w ten sposób zespół maszyn zwany układem kaskadowym. Regulacja prędkości obrotowej i kompensacja współczynnika mocy polega na regulacji wartości i fazy napięcia maszyny dodatkowej przy zachowaniu takiej częstotliwości jaka występuje w obwodzie wirnika stojana. W zależności od tego czy dokonuje się przetwarzanie częstotliwości f2 w częstotliwość sieci zasilającej czy też przetwarzanie prądu przemiennego w prąd stały, omawiany układ nazywamy kaskadą prądu przemiennego lub kaskadą prądu stałego. Zaletą tych układów jest to, że w przypadku regulacji prędkości obrotowej w dół moc wydawana w obwodzie wirnika odzyskiwana jest jako moc elektryczna lub mechaniczna.
15. Silniki jednofazowe.
W stojanie silnika umieszczone jest uzwojenie jednofazowe, natomiast wirnik na ogół jest klatkowy. Prąd przemienny doprowadzony do uzwojenia stojana wytwarza pole magnetyczne, które można rozłożyć na dwa pola kołowe wirujące w przeciwnym kierunkach. Pola te indukują w uzwojeniu klatkowym siły elektromotoryczne. Klatka wirnika wytworzy również dwa pola magnetyczne wirujące w przeciwnych kierunkach. Oddziaływanie pól magnetycznych stajana z wirnikiem powoduje powstanie dwóch momentów elektromagnetycznych. Dodając je do siebie otrzymamy charakterystykę momentu silnika jednofazowego. Z charakterystyki widać, że silnik nie wytworzy początkowego momentu rozruchowego oraz nie ma określonego kierunku wirowania. Silnik można uruchomić w obu kierunkach przez mechaniczne nadanie wirnikowi prędkości początkowej, przy której moment elektromagnetyczny jest większy od momentu obciążającego wirnik. Brak momentu rozruchowego jest podstawową wadą silnika.
Sposoby wytwarzania momentu rozruchowego:
- silnik z fazą rozruchową:
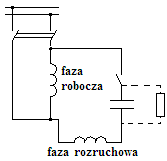
W stojanie maszyny umieszczamy oprócz uzwojenia fazy roboczej uzwojenie dodatkowe, której oś tworzy w przestrzeni z osią fazy roboczej kąt elektryczny (np. 90o). jeżeli prądy płynące w tych dwu uzwojeniach będą przesunięte względem siebie w fazie o dany kąt to powstanie pole wirujące kołowe. W chwili zasilenia nieruchomego silnika napięciem pojawi się moment rozruchowy. aby uzyskać przesunięcie fazowe pomiędzy prądami w fazie roboczej i rozruchowej, włączamy w szereg z fazą rozruchową kondensator lub rezystor.
- silnik z umieszczonym zwojem zwartym na części jawnego bieguna w stojanie. Powstają wówczas dwa strumienie o osiach przesuniętych względem siebie w przestrzeni i o pewnym przesunięciu fazowym. Wobec tego pole wypadkowe jest wirujące i zapewnia powstanie momentu rozruchowego.
16. Praca silnika w warunkach różnych od znamionowych.
Praca silnika przy zasilaniu jednofazowym:
Może wystąpić gdy przepali się bezpiecznik jednej z faz. Wówczas gdy silnik był połączony w gwiazdę dwie fazy połączone są ze sobą w szereg a trzecia nieczynna (silnik pracuje jako jednofazowy). Gdy uzwojenia połączone były w trójkąt również pracuje jako silnik jednofazowy, z tym że jedna faza jest połączona równolegle w stosunku do pozostałych. Jeżeli przerwa w obwodzie jednej fazy nastąpi podczas pracy silnika, to silnik będzie pracował dalej ale prąd pobierany z sieci wzrośnie ![]()
razy. Gdy przerwa nastąpi przy znamionowym obciążeniu będzie on przeciążony i może ulec uszkodzeniu. Jeżeli silnik stoi, to przy przewie w jednej fazie nie może on samodzielnie ruszyć.
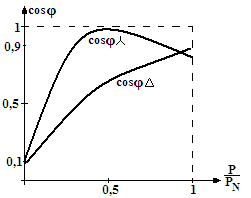
Praca silnika przy połączeniu w gwiazdę i trójkąt:
W chwili rozruchu prąd pobierany przez silnik zależy od napięcia przypadającego na jedną fazę silnika i od impedancji tej fazy. Przy obciążeniu prąd pobierany przez silnik zależy od obciążenia a nie od impedancji uzwojenia. Prąd fazowy przy połączeniu w gwiazdę i w trójkąt będzie taki sam, natomiast prąd przewodowy przy połączeniu w gwiazdę nie zmieni się, a przy połączeniu w trójkąt będzie ![]()
razy większy. Stosunek mocy przy obu połączeniach wynosi: ![]()
. Przy założeniu cosφΔ=cosφ stosunek wyniósłby ![]()
. Współczynnik mocy przy gwieździe jest na ogół większy niż przy trójkącie. Z charakterystyki wynika, że silnik pracuje przy obciążeniu w granicach 0,4-0,6 mocy znamionowej to korzystne jest połączenie w gwiazdę ze względu na większy współczynnik mocy z jakim pracuje silnik.
17. Stabilność pracy silników indukcyjnych.
Stabilność pracy związana jest z właściwościami maszyn pracujących pod obciążeniem. Można wyróżnić dwa stany mechaniczne:
- stan ustalony - prędkość obrotowa (kątowa) jest stała. Jest to stan, w którym moment M rozwijany przez silnik jest równy co do wartości, lecz przeciwnie skierowany do statycznego momentu obciążenia maszyny napędzanej.
- stan nieustalony, w którym prędkość obrotowa się zmienia. Sytuacja występuje gdy nie zachodzi równowaga momentu rozwijanego przez silnik i momentu hamującego: ![]()
- moment dynamiczny. Jeżeli Md>0 to układ przyspiesza, gdy Md<0 układ zwalnia. Obowiązuje wtedy zależność: ![]()
gdzie J jest momentem bezwładności części wirujących zespołu. W przypadku gdy moment bezwładności nie jest funkcją położenia otrzymujemy: ![]()
.
Stany nieustalone w pracy maszyn wirujących występują w różnych warunkach pracy, przy: rozruchu, regulacji prędkości obrotowej, zatrzymywaniu się układu, zmianie obciążenia, zmianie warunków zasilania.
Przy zaburzeniu równowagi momentów zespołu pracującego dotychczas w stanie ustalonym mogą zaistnieć dwa przypadki:
- praca stabilna - jeżeli po zniknięciu krótkotrwałego zaburzenia układ wraca do stanu równowagi
- praca niestabilna - jeżeli w przypadku zaburzenia układ zatrzymuje się lub wykazuje tendencje do rozbiegania się (nieograniczony wzrost prędkości).
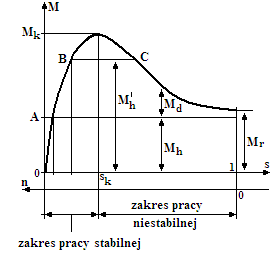
W zakresie poślizgów 0<s<sk (zakres pracy stabilnej) następuje samoczynne dostosowanie parametrów pracy silnika do wartości momentu hamującego, powodując przy każdej wartości tego momentu odpowiedni stan ustalony.
W zakresie poślizgów sk<s<1 mamy zakres pracy niestabilnej.
Moment silnika jest proporcjonalny do kwadratu doprowadzonego napięcia, zatem każde obniżenie napięcia w sieci spowoduje znacznie zmniejszenie momentu wytworzonego przez silnik. Z tego względu punkt pracy znamionowej silnika musi leżeć w zakresie pracy stabilnej dość daleko od momentu krytycznego, takk aby obniżenie napięcia nie powodowało zahamowań silnika. Najczęściej moment znamionowy silnika indukcyjnego jest co najmniej 2 razy mniejszy od jego momentu krytycznego czyli przeciążalność silnika wynosi: ![]()
.
18. Wykres kołowy.
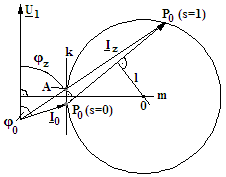
Wykres kołowy maszyny indukcyjnej przedstawia na płaszczyźnie zespolonej miejsca geometryczne końców wektorów prądu uzwojeń wirnika i stojana przy zmianach poślizgu maszyny pracującej przy niezmiennych warunkach zasilania i niezmiennych impedancjach zewnętrznych włączonych w obwód uzwojeń. Mając wykres kołowy maszyny indukcyjnej można z niego wyznaczyć prądu uzwojeń, współczynnik mocy, moment elektromagnetyczny, bilans mocy i strat przy dowolnym poślizgu.
Przy konstrukcji wykresu kołowego punktem wyjścia są dwa charakterystyczne stany: idealny bieg jałowy (s=0) oraz stan zwarcia (s=1). Punkty te wyznaczamy znając wartość prądów Io oraz Iż a także współczynników mocy cosφO oraz cosφZ. Przez punkt P0 prowadzimy prostą k równoległą do U1. Przetnie ona prąd IZ w punkcie A. symetralna odcinka P0A wraz z symetralna odcinka P0P1 wyznaczają punkt 0 będący środkiem okręgu.
11
Wyszukiwarka