![]()
![]()
![]()
WYZNACZANIE MODUŁU YOUNGA METODĄ ZGINANIA PRĘTA
1. Odkształcenia
Odkształcenie ciał jest spowodowane działaniem zrównoważonych sił lub zrównoważonych momentów sił. Odkształcenie, które znika z chwilą usunięcia działających sił nazywamy sprężystym, a zjawisko sprężystością. Odkształcenie, które nie znika po usunięciu tych sił, nazywamy plastycznym, a zjawisko - plastycznością.
Własności sprężyste mają, do pewnego stopnia, wszystkie ciała stałe. Odkształcenia wiążą się ze zmiana położenia cząsteczek ciała, a więc i zmianą położenia równowagi. W wyniku oddziaływań międzycząsteczkowych pojawia się siła sprężystości i związana z nią energia potencjalna. Siły odkształcające działają prostopadle lub stycznie do powierzchni. Siłami normalnymi nazywamy te, które działają prostopadle do całej powierzchni S.
Przykładami odkształceń mogą być odkształcenia jednorodne (np. pod wpływem ciśnienia hydrostatycznego, ścinania, ściskania przy jednoczesnym powstrzymywaniu ścian bocznych) lub np. ugięcie pręta.
Siłę na jednostkę powierzchni nazywamy naprężeniem. Wektor naprężenia ma kierunek i zwrot zgodny z kierunkiem i zwrotem siły oraz wartość równą stosunkowi wartości siły do powierzchni:
![]()
![]()
![]()
Jeżeli przez F rozumiemy siłę wewnętrzną, to naprężenie nazywamy wewnętrznym. Dla siły zewnętrznej mówimy odpowiednio o wywieranym na ciało naprężeniu zewnętrznym. Podobnie jak siłę można też naprężenie rozłożyć na składową normalną i styczną.
Naprężenie normalne, nazywane też w przypadku siły ściskającej ciało ciśnieniem, a w przypadku siły rozciągającej ciągnieciem, powoduje na ogół zmianę objętości ciała, naprężenie styczne natomiast zmianę postaci.
Miarą wielkości odkształcenia jest odkształcenie względne ε, które jest stosunkiem zmiany długości ∆l do długości początkowej l:
![]()
Należy jednak pamiętać, że zmiana długości jest tylko małym ułamkiem długości początkowej.
2. Prawo Hooka i moduł Younga
Prawo Hooka rządzi reakcją ciał stałych sprężystych na działającą na nie siłę. Mówi ono, że: wydłużenie bądź skrócenie ciała stałego pod wpływem działającej siły jest:
wprost proporcjonalne do wartości działającej na ciało siły i długości początkowej ciała;
odwrotnie proporcjonalne do pola przekroju;
zależne od rodzaju substancji z jakiej ciało jest wykonane.
Zatem prawo to mówi również, że naprężenie jest proporcjonalne do odkształcenia. Dla przypadku naprężenia normalnego prawo to można wyrazić wzorem:
![]()
który stosuje się zarówno do naprężeń dodatnich, jak i ujemnych, tzn. dla rozciągania i ściskania. Stała E jest wewnętrzną własnością samej tylko substancji i nazywa się modułem Younga (inaczej moduł odkształcalności liniowej lub moduł sprężystości podłużnej). Moduł Younga posiada wymiar naprężenia Nm-2 i jest wielkością określającą sprężystość materiału. Moduł Younga ma zwykle dla danego materiału prawie taką samą wartość przy rozciąganiu i ściskaniu.
W przypadku naprężenia stycznego prawo Hooka wyraża się wzorem:
![]()
Współczynnik G zwany jest modułem sztywności i ma wymiar Nm-2rad-1.
Prawo Hooka składa się jeszcze z jednej części: jeżeli element substancji rozciąga się w jednym kierunku, to element ten zwęża się w kierunkach prostopadłych do kierunku rozciągania. Przypuśćmy, że mamy prostopadłościenny element substancji o długości l, szerokości w i wysokości h. Wówczas zwężenie szerokości jest proporcjonalne do szerokości w, a także i do ∆l/l. Takie boczne zwężenie względne zachodzi w jednakowym stopniu zarówno dla szerokości, jak i dla wysokości, i zwykle się je zapisuje w postaci:
![]()
gdzie stałą v wyrażającą inną własność substancji, nazywa się stałą Poissona. Jest to liczba zawsze dodatnia i mniejsza od ½.
Warto wspomnieć jeszcze, że pomiędzy trzema wymienionymi współczynnikami zachodzi związek: ![]()
3. Sposób pomiaru modułu Younga metodą strzałki ugięcia
Najprostszym sposobem wyznaczenia modułu Younga jest pomiar przyrostu ∆l pręta długości l, umocowanego na jednym jego końcu i rozciąganego siłą F, przyłożoną do drugiego jego końca. Ten sposób może być stosowany tylko do drutów i prętów o niewielkim przekroju. W przypadku prętów grubych, o przekroju jednego lub kilku cm2, dla uzyskania mierzalnych wydłużeń należało by stosować bardzo duże siły, co jest połączone z dużymi trudnościami technicznymi.
W przypadku prętów grubych używamy innej metody, polegającej na wykorzystaniu odkształcenia złożonego, jakie występuje w czasie zgięcia pręta umocowanego na jednym końcu lub podpartego w dwu miejscach w pobliżu jego końców. Odkształcenie takie daje się sprowadzić do jednostronnego rozciągania i ściskania pręta. Obciążenie pręta siłą F, przełożoną w jego środku wywołuje specyficzną deformację, której miarą jest strzałka ugięcia S. W czasie zginania pręta jakie tu następuje, jego dolne warstwy wydłużają się, a górne skracają, a warstwa środkowa, którą nazywamy neutralną, zachowuje swoją długość, ulegając tylko wykrzywieniu.
Zgodnie z Prawem Hooka strzałka ugięcia S jest proporcjonalna do siły deformującej F.
S=kF
Mamy tu do czynienia z sumowaniem efektów odkształceniowych rozciągania i ściskania poszczególnych warstw pręta. Współczynnik k będzie zależał od rozmiarów pręta oraz od tego modułu sprężystości, który odnosi się do jednostronnego rozciągania i ściskania prętów, czyli modułu Younga.
4. Wyprowadzenie związku: ![]()
Załóżmy, że lewy koniec pręta (belki) jest zamocowany poziomo, a do jej prawego końca przykładamy siłę (obciążenie). Pod wpływem działania tej siły pręt (belka) ugnie się w sposób pokazany na rysunku:
Górne warstwy ugiętego pręta (belki) wydłużają się, a warstwy dolne ulegają skróceniu. W środku wysokości pręta (belki) istnieje tzw. warstwa obojętna W, której długość nie ulega zmianie. Widoczne to jest na rysunku:
Zarówno do wydłużenia, któremu ulega górna część pręta (belki) jak i do skrócenia (część dolna) stosuje się prawo Hooka: σ=εE. Oznaczmy przez S strzałkę ugięcia, czyli odchylenie prawego końca pręta (belki) od położenia pręta (belki) nieobciążonego. Celem wyprowadzenia interesującego nas związku zastanowimy się, jakim zmianom na skutek ugięcia ulegają przekroje p i q, odległe od punktu zamocowania pręta (belki) o x oraz (x+∆x). Przed odkształceniem pręta (belki) przekroje te były równoległe do siebie, a po ugięciu tworzą kąt φ. Przez punkt, w którym płaszczyzna q przecina warstwę W, przeprowadzimy płaszczyznę q' równoległą do płaszczyzny p. Na skutek ugięcia warstwa V, znajdująca się w odległości y od warstwy W, wydłuża się o φy. Weźmy pod uwagę element pręta (belki) o długości ∆x, grubości ∆y i szerokości b. Przekrój jego powierzchni prostopadłej do grubości pręta (belki) wynosi b∆y. Siła powodująca odkształcenie tego elementu zgodnie z równaniami:
![]()
, gdzie Fn - siła normalna, S - powierzchnia i σ - odkształcenie normalne;
![]()
, gdzie ε - odkształcenie względne, a - długość początkowa, ∆a - zmiana długości;
![]()
, gdzie E - moduł Younga
wyraża się wzorem ![]()
, a ponieważ ![]()
oraz ![]()
, otrzymamy ![]()
.
Moment tej siły względem warstwy W wynosi ![]()
.
Sumując powyższe wyrażenia na wszystkie wartości y otrzymamy 
.
Jeżeli ponadto wprowadzimy oznaczenie 
, to ostatnie równanie przyjmie postać ![]()
.
Pręt odkształca moment pochodzący od zewnętrznej siły F ![]()
, gdzie l oznacza długość pręta (belki), a wyrażenie w nawiasie kwadratowym jest ramieniem przekroju q. Po zaniedbaniu małej wielkości ∆x ostatnie równanie przyjmuje postać ![]()
. Kąt φ jest zawarty również miedzy stycznymi do pręta (belki) w punktach, w których przekroje p i q przecinają górną powierzchnię pręta(belki); zatem możemy napisać ![]()
.
Porównując wzory ![]()
i ![]()
oraz uwzględniając związek ![]()
otrzymamy ![]()
.
Całkowitą strzałkę ugięcia otrzymamy, sumując analogiczne wyrażenia dla wszystkich odcinków ∆x. Jeżeli sumowanie zastąpimy całkowaniem, otrzymamy 
lub po scałkowaniu ![]()
.
5. Rola sprężyn w technice i technologii.
Nie wszyscy wiedzą jak często w codziennym życiu wykorzystujemy zjawisko fizyczne jakim jest sprężystość. Sprężyny można spotkać właściwie wszędzie, począwszy od mebli i zegarów a kończąc na samochodach (zawieszenie i amortyzatory). Definicja sprężyny mówi nam, że jest to element sprężysty używany w budowie maszyn, głównie jako łącznik w połączeniach sprężystych. Ogólnie mówiąc, sprężyny można podzielić na: sprężyny ściskane, sprężyny rozciągane, sprężyny skręcane i sprężyny zginane. Do rodzajów sprężyn zaliczamy sprężyny śrubowe, sprężyny naciskowe, sprężyny naciągowe, sprężyny płaskie, sprężyny wielokrotne, sprężyny spiralne, sprężyny krążkowe, sprężyny pierścieniowe, sprężyny zaworowe i sprężyny dociskowe. Omówię dwa zastosowania sprężyn:
a) zastosowanie sprężyn w budowie zegara:
Sprężyną napędową będziemy nazywać sprężynę będąca akumulatorem energii w mechanizmach zegarowych. Do napędu w zegarach najczęściej stosuje się sprężyny spiralne taśmowe pracujące na zginanie, wykonane ze stali sprężynowej. Sprężyny spiralne z drutu, stosowane są jedynie w mechanizmach, w których potrzebna jest niewielka pojemność napędu nie przekraczająca kilku minut. Stosuje się trzy rodzaje napędów sprężynowych:
W pierwszym zewnętrzny koniec sprężyny zamocowany jest do nieruchomej części korpusu, a wewnętrzny nawija się na wałku sprężyny, napędzając go. Sprężyna jest zwykle bez bębna. Ten rodzaj napędu stosowany jest tylko w najtańszych zegarach, najczęściej popularnych budzikach, ponieważ jego najpoważniejszą wadą jest zatrzymywanie się mechanizmu w czasie nakręcania sprężyny.
W drugim rodzaju napędu sprężyna umieszczona jest zwykle w bębnie, koniec wewnętrzny umocowany jest do nieruchomego wałka służącego do nakręcania sprężyny, mechanizm napędzany jest zewnętrznym końcem sprężyny umocowanej do wewnętrznej powierzchni bębna. Ten rodzaj stosowany jest w zegarach wyższej klasy.
W trzecim rodzaju napęd jest przekazywany dwoma końcami sprężyny. Jeden koniec może napędzać mechanizm chodu, a drugi mechanizm bicia.
Napęd sprężynowy ma jednak wadę: nierówny moment napędowy. W miarę rozwijania się nakręconej sprężyny moment ten maleje, co ma wpływ na dokładność chodu zegara. W prostych mechanizmach, najczęściej kieszonkowych, stosuje się zapadki, które pozwalają wykorzystać tylko środkową część zwojów sprężyny, w zakresie, gdzie moment jest prawie stały. W dużych mechanizmach stosuje się bęben wyrównawczy. Tworzy on przekładnię cięgnową o zmiennym przełożeniu.
Poza tym oprócz sprężyn, które w stanie swobodnych mają kształt spirali, w zegarkach naręcznych stosuje się sprężyny, które w stanie swobodnym mają kształt litery S. Straty na tarcie takich sprężyn są małe, dlatego charakteryzują się one większą sprawnością i mniej zmiennym momentem napędowym.
b) zastosowanie sprężyn w tensometrach:
Na początek wyjaśnię pojęcie tensometrii i tensometru:
Tensometria - metoda wyznaczania naprężeń na podstawie pomiarów odkształceń materiału badanej konstrukcji. Metoda punktowa, gdyż pozwala wyznaczyć odkształcenie
badanego ciała tylko w punkcie przyłożenia tensometru.
Tensometr (czujnik tensometryczny) - przyrząd do pomiaru odkształceń liniowych oraz za ich pośrednictwem naprężeń występujących przy obciążeniu badanego ciała. Zasadnicza część urządzenia tensometrycznego, przylegająca do powierzchni badanego ciała w ten sposób, że jej odkształcenia są identyczne z odkształceniami tego ciała. Czujnik tensometryczny ma skończone rozmiary - nie może być dowolnie mały (najmniejsze tensometry ok. 0.1 mm) - pomiar w punkcie jest niemożliwy.
Rodzaje tensometrów:
1. Mechaniczne
• mechaniczne,
• optyczno-mechaniczne
• strunowe
2. Elektryczne
• rezystancyjne (oporowe) - obecnie najpowszechniejsze
• indukcyjne
• elektrodynamiczne
• piezoelektryczne
• pojemnościowe
Opiszę budowę dwóch tensometrów, w których jest wykorzystana sprężyna:
Tensometr Huggenbergera
Używany w badaniach statycznych, przy stałych lub bardzo wolno zmieniających się siłach.
Tensometr mocuje się na powierzchni przy użyciu przyssawek lub specjalnych uchwytów mechanicznych albo magnetycznych.
Zalety tensometru Huggenbergera:
duża sztywność i lekkość
duża dokładność
niezawodność, łatwość regulacji
możliwość pomiaru na powierzchniach zakrzywionych
Wady:
wysoka cena
wrażliwość na wstrząsy i zmiany temperatury
należy starannie dobierać nacisk na ostrze (zbyt mały - ślizganie się ostrzy po powierzchni, zbyt duży - uszkodzenie ostrzy i panewki)
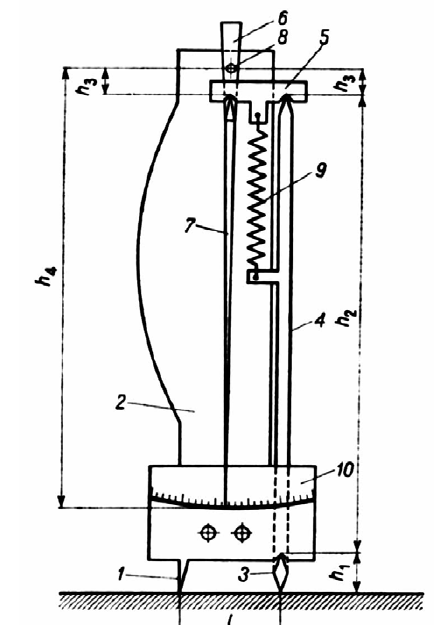
Budowa:
1- ostrze nieruchome
2- kadłub
3 - ostrze ruchome (h1)
4 -dźwignia (h2)
5 -beleczka pozioma
6 - dźwignia
7 - wskazówka (h4)
8 - oś obrotu (h3)
9 - sprężyna
10 - skala
Tensometr Johannsona - mikrokator
Zastosowany głównie do pomiarów statycznych odkształceń konstrukcji.
Zasada działania: ruch ostrza ruchomego przenosi się za pośrednictwem śruby regulacyjnej na dźwignię napinającą, która powoduje zmianę długości taśmy skręconej wywołującej ruch wskazówki bezpośrednio do niej przytwierdzonej.
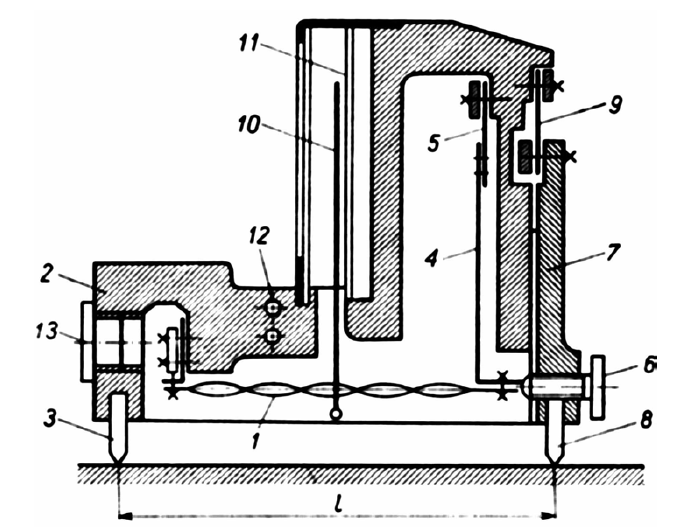
Budowa:
1 - taśma sprężysta skręcona (metalowa lub szklana)
2 - kadłub
3 - ostrze nieruchome
4 - dźwignia napinająca
5 - sprężyna
6 - śruba regulująca
7 - dźwignia
8 - ostrze ruchome
9 - sprężyna
10 - wskazówka
11 - skala
12 - otwory do mocowania uchwytów
13 - korek
Literatura:
1. R. Resnick, D. Halliday, „Fizyka”
2. T. Drynski, „Ćwiczenia laboratoryjne z fizyki”
3. H. Szydłowski, „Pracownia Fizyczna”