POLITECHNIKA WARSZAWSKA
INSTYTUT MASZYN ELEKTRYCZNYCH
Zakład Konstrukcji Urządzeń Elektrycznych
INSTRUKCJA ĆWICZENIA LABORATORYJNEGO
Łączniki elektromagnetyczne w układach sterowania automatycznego
Laboratorium Elektrotechniki w Inżynierii Komunalnej
Warszawa 2003
Cel ćwiczenia
Celem ćwiczenia jest zapoznanie się z podstawową aparaturą układów sterowania stykowego, zasadami rysowania schematów, łączenia układów oraz podstawowymi funkcjami, jakie spełniają układy sterownicze. Program przewiduje montaż i sprawdzenie działania najprostszych układów sterowania (np. układów napędowych) spełniających funkcje: podtrzymania, blokady i sygnalizacji.
Wprowadzenie
Sterowanie automatyczne
Zadaniem urządzeń automatycznego sterowania jest wykonywanie pewnych czynności bez udziału obsługi. Jest to w niektórych przypadkach konieczne lub niezbędne np. wtedy, gdy człowiek nie nadążałby z wykonaniem tych czynności ręcznie. W innych przypadkach zastosowanie automatyki nie jest konieczne, ale jej wprowadzenie jest celowe, gdyż przyczynia się do zwiększenia wydajności pracy, podniesienia sprawności oraz niezawodności maszyn i urządzeń.
Układy automatyki elektrycznej stosowane w urządzeniach technicznych można podzielić na dwa rodzaje:
układy automatycznego sterowania
układy regulacji automatycznej
Różnicę między automatycznym sterowaniem a automatyczną regulacją wyjaśniają schematy blokowe. W układzie sterowania automatycznego (rys.1) elektryczny układ sterujący steruje pracą danego urządzenia, zwanego obiektem sterowania. Po uruchomieniu urządzenie pracuje samoczynnie, przy czym wszelkie zmiany parametrów pracy (np. prędkości, kierunku wirowania itp.) przeprowadzane są automatycznie w zależności od określonych czynników (np. czasu, przebytej drogi itp.)
.
Rys. 1. Schematy blokowe układów: a) automatycznego sterowania b) automatycznej regulacji
W układzie automatycznej regulacji z rysunku 1b pracą obiektu regulacji kieruje układ regulujący (regulator), przy czym wielkość regulowana y jest mierzona w punkcie B zwanym węzłem zaczepowym i doprowadzana do punktu A, zwanego węzłem sumacyjnym, znajdującym się na wejściu układu regulacji. Przepływ informacji dotyczącej wartości mierzonej regulowanej wielkości y od punktu B do punktu A tworzy tzw. pętlę sprzężenia zwrotnego. W węźle sumacyjnym wartość mierzona y jest porównywana z wartością zadaną x regulowanej wielkości. Automatyczny układ regulacji działa zawsze w tym kierunku, aby wartość mierzona y równała się wartości zadanej x.
Układy automatycznej regulacji charakteryzują się tym, że mają jedną lub kilka pętli sprzężenia zwrotnego tworzących obwody zamknięte. Z tego względu nazywamy je układami zamkniętymi.
Układy automatycznego sterowania nie mają zamkniętych sprzężeń zwrotnych i noszą nazwę układów otwartych.
Podział układów sterowania automatycznego
Sterowanie automatyczne wiąże się nierozłącznie z blokadą i sygnalizacją. Blokada uniemożliwia wykonanie błędnych czynności sterowania. Sygnalizacja informuje obsługę o przebiegu pracy urządzenia. Blokada i sygnalizacja usprawniają obsługę i zwiększają bezpieczeństwo pracy.
Elektryczne układy sterowania automatycznego można podzielić na dwie grupy :
Układy sterowania stycznikowo-przekaźnikowe,
Układy sterowania sekwencyjnego (kolejnościowego).
Układy sterowania stycznikowo-przekaźnikowe są zbudowane, jak wskazuje nazwa, z dwóch podstawowych elementów: styczników i przekaźników. Styczniki są elementami wykonawczymi, które włączają w odpowiedniej chwili obwody robocze. Przekaźniki sterują pracą styczników, powodując wzbudzenie cewek styczników w zależności od określonych czynników - czasu, przebytej drogi, prędkości obrotowej itp. W zależności od tych czynników rozróżnia się sterowanie w funkcji: czasu, drogi, prędkości itp.
Sterowanie sekwencyjne stosuje się w urządzeniach, w których zachodzi konieczność wykonywania odpowiednich czynności przez podzespoły w ściśle określonej kolejności.
Symbole graficzne
Poniżej rozpatrywane będą zasady łączenia i sterowania aparatów i maszyn elektrycznych wchodzących w skład układu napędowego. Zasady te mogą być również zastosowane do innych układów wymagających sterowania.
Wszystkie elementy układu tworzą obwody elektryczne. Najważniejsze znaczenie mają:
obwód główny - obwód łączący silnik z siecią zasilającą, nazywany również obwodem prądu głównego,
obwód sterujący, zawierający cewki i styki przekaźników, styczników, przyciski, wyłączniki krańcowe ewentualnie inną aparaturę sterowniczą.
Schematy układów sterowania automatycznego są nieraz bardzo rozbudowane. Szczególnie złożony obraz przedstawia schemat rzeczywisty połączeń poszczególnych zacisków i elementów aparatury sterującej, zwany schematem montażowym.
W celu możliwie jasnego przedstawienia obwodów sterujących rysuje się schematy ideowe. Na schematach elektrycznych obwód główny rysuje się linią grubą zaś obwód sterujący linią cienką. Poszczególne elementy układu sterującego przedstawia się na tych schematach przy pomocy symboli graficznych. Symbole te rozmieszczone są na schemacie tak, aby połączenia były jak najkrótsze, bez zbędnych krzyżowań i załamań przewodów.
W dalszym ciągu będą rysowane tylko schematy ideowe. Zestawienie najważniejszych symboli graficznych podano w tablicy1.
TABLICA1 Wybrane symbole graficzne stosowane na schematach
|
Zwierny zestyk łącznika |
|
Rozwierny zestyk łącznika |
|
Przełączany zestyk łącznika (symbol ogólny) |
|
Łącznik trójbiegunowy ze stykami zwiernymi (wyłącznika, stycznika) sprzężonymi mechanizmami |
|
Zestyk przełączony łącznika wielopołożeniowego |
|
Zwierny zestyk łącznika z napędem ręcznym z samoczynnym powrotem (przycisk załączający) |
|
Rozwierny zestyk łącznika z napędem ręcznym z samoczynnym powrotem (przycisk odłączający) |
|
Cewka stycznika, przekaźnika, wyzwalacza |
a)
b)
c). |
Zestyk przekaźnika - symbol ogólny:
|
a). |
Cewka przekaźnika zwłocznego o zwłoce :
|
a).
b).
c).
d).
|
Zestyk przekaźnika o opóźnionym działaniu (czasowego) :
|
|
Organ napędowy przekaźnika termicznego (cieplnego) |
|
Zestyk rozwierny przekaźnika termicznego (cieplnego) |
|
Bezpiecznik topikowy |
|
Lampka sygnalizacyjna |
Jako przykład może posłużyć schemat połączeń obwodu głównego i sterującego stycznika elektromagnetycznego (rys. 2) Schematy rysuje się zawsze w stanie bezprądowym i beznapięciowym. Wyłączniki są w stanie otwartym, a przyciski - nie naciśnięte. Taki stan nazywa się stanem normalnym.
Wyróżniamy następujące rodzaje zestyków:
zestyki normalnie otwarte - styki, które są otwarte w stanie beznapięciowym, a zwierają się dopiero po włączeniu prądu do odpowiedniego. Noszą one także nazwę zestyków zwiernych.
zestyki normalnie zamknięte - styki, które w stanie beznapięciowym są zamknięte, a rozwierają się z chwilą włączenia prądu do obwodu sterującego. Nazywa się je zestykami rozwiernymi.
Elementy układów sterowania automatycznego
Stycznik elektromagnetyczny
Stycznik jest to łącznik, którego zestyki robocze są zamykane przy pomocy elektromagnesu i utrzymywane w takim stanie tak długo, dopóki napięcie załączone do cewki jest odpowiednio wysokie. Po przerwaniu obwodu cewki elektromagnesu następuje opadnięcie zwory i otwarcie zestyków roboczych. Na rys2 podany jest schemat elektryczny stycznika. Należy tu rozróżnić części obwodu głównego (linia gruba) od obwodu sterującego (linia cienka).
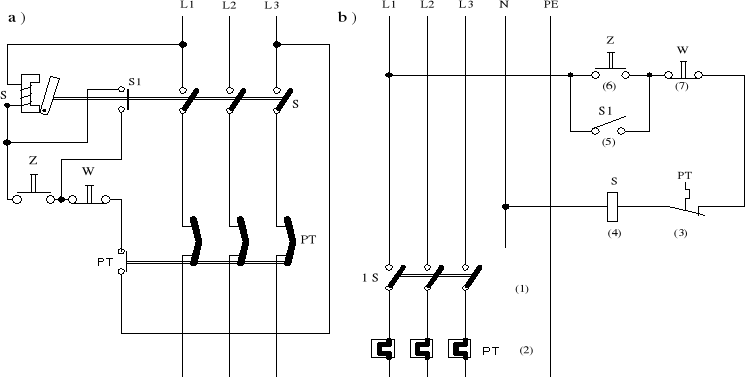
Rys. 2. Schemat stycznika: a) montażowy b) ideowy
S - cewka stycznika i styki główne, pomocnicze S1, PT - przekaźnik termiczny
Na drodze przepływu prądu roboczego znajdują się zestyki robocze (1) oraz przekaźniki cieplne (2). W obwodzie sterującym jest zestyk przekaźnika cieplnego (3), cewka elektromagnesu (4), zestyk pomocniczy (5), przycisk załączający (6) oraz przycisk wyłączający (7). Przyciski (6) i (7) stanowią oddzielne elementy i mogą być umieszczone w dowolnym miejscu (możliwość zdalnego sterowania). Zestyk pomocniczy (5), zamykający się jednocześnie ze zwieraniem styków roboczych, jest połączony równolegle z przyciskiem (7). Układ taki pozwala realizować funkcję samopodtrzymania. Do załączania wystarczy jedynie krótkotrwały impuls podany za pomocą przycisku (6). Przerwania obwodu sterującego może dokonać obsługa przyciskiem (7) lub przekaźniki cieplne (w przypadku przeciążenia) zestykiem (3). Układ stycznika nie pozwala na samorozruch silnika po zaniku i ponownym pojawieniu się napięcia oraz po zadziałaniu przekaźników cieplnych. Wraz z rozłączeniem styków głównych następuje przerwanie obwodu cewki elektromagnesu przy pomocy zestyku (5).
Stycznik jest łącznikiem przeznaczonym do częstego otwierania i zamykania obwodu przy normalnych czynnościach eksploatacyjnych silnika, takich jak rozruch, hamowanie, regulacja prędkości obrotowej itp.
Przekaźniki elektromagnetyczne pośredniczące
Funkcjonowanie elaktromagnetycznych przekaźników pośredniczących opiera się na podobnej zasadzie działania jak w przypadku stycznika elektromagnetycznego Zestyki przekaźników mają stosunkowo niewielką obciążalność prądową, rzędu kilku amperów. W związku z tym przekaźnik jest wyposażony w znacznie mniejszy elektromagnes niż stycznik, a styki nie mają dodatkowych urządzeń do gaszenia łuku. Wymiary przekaźnika są mniejsze niż wymiary stycznika, natomiast trwałość przekaźnika jest bardzo wysoka i dochodzi do kilkudziesięciu milionów łączeń. Przekaźniki w zależności od przeznaczenia mają jedną lub wiele par zestyków. Budowę dwóch typów przekaźników pośredniczących pokazano na rysunku 3.
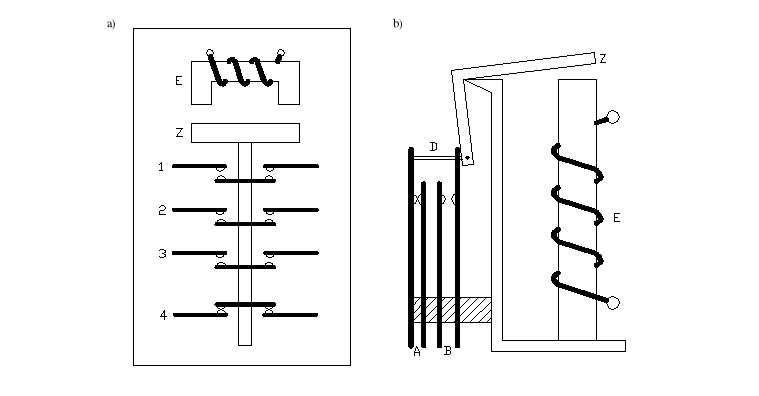
Rys. 3. Przekaźniki pośredniczące: a) typ przemysłowy, b) typ telefoniczny
Pod wpływem prądu przepływającego przez cewkę powstaje siła przyciągająca zworę przekaźnika. Po przyciągnięciu zwory zamykają się zestyki zwierne: (1), (2), (3) a otwierają rozwierne (4). Po odłączeniu napięcia i opadnięciu zwory otwierają się zestyki: (1),(2),(3) a zamykają rozwierne (4). W najczęściej spotykanych rozwiązaniach konstrukcyjnych przekaźników napięcie cewki wynosi 230V lub 400V, prąd roboczy zestyków - od 1 do 10A, ilość zestyków - od jednej do trzech par przełączalnych.
Przekaźnik czasowy zwłoczny
Przekaźnik czasowy zwłoczny jest urządzeniem, które dokonuje łączenia lub rozłączenia swych styków z pewnym opóźnieniem od chwili podania sygnału na zaciski cewki sterującej. Za sygnał należy uważać zarówno pojawienie się jak i zanik napięcia na zaciskach przekaźnika. Przekaźniki czasowe budowane są na różnych zasadach, gdyż do pomiaru czasu można wykorzystać różne zjawiska. Poniżej omówiony zostanie przekaźnik czasowy synchroniczny.
Przekaźniki czasowe synchroniczne składają się z miniaturowego silniczka synchronicznego o mocy ok. 2W i prędkości obrotowej 375obr/min, przekładni zębatej napędzanej tarczą programową, elektromagnesu i zespołu styków (rys. 4). Po zamknięciu styku PC3 zostaje uruchomiony silniczek M i jednocześnie włączane jest zasilanie uzwojenia cewki elektromagnesu PC. Przyciągana zwora Z połączona jest mechanicznie z dźwignią D działającą na zespół styków. Ruch dźwigni jest ograniczony kołkiem oporowym K naciskającym na tarczę programową TP, którą można nastawić na określony kąt pokrętłem R. Po nastawionym czasie silniczek obróci przez przekładnię tarczę TP tak, że kołek wpadnie w wykrój tarczy. Dźwignia D wykona wtedy pełny ruch i nastąpi przełączenie styków PC1, PC2, PC3. Otwierają się wtedy styki rozwierne PC3 przerywające bieg silniczka. Taki stan trwa dopóki zasilana jest cewka PC. Wyłączenie cewki PC przez otwarcie styku PC3 lub zanik napięcia w sieci zasilającej spowoduje opadnięcie zwory Z i powrót styków do położenia wyjściowego.
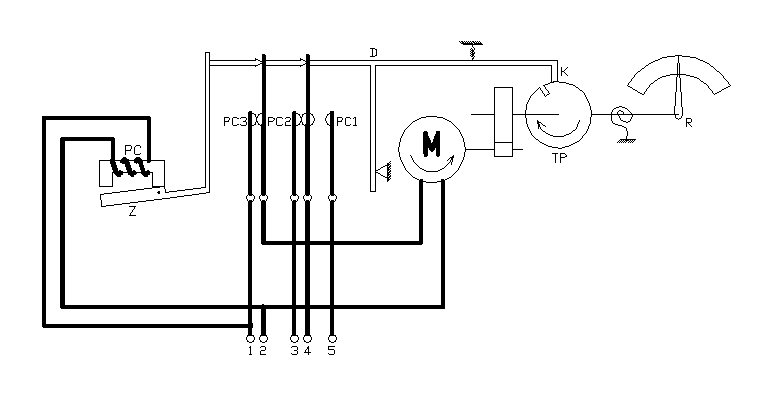
Rys. 4. Szkic budowy przekaźnika czasowego synchronicznego (typ RS-521)
Schemat ideowy przekaźnika synchronicznego podano na rysunku 5. Na schematach ideowych sterowania automatycznego nie podaje się pełnego układu połączeń przekaźnika, jak na rysunku 4 lecz jedynie jego formę uproszczoną.
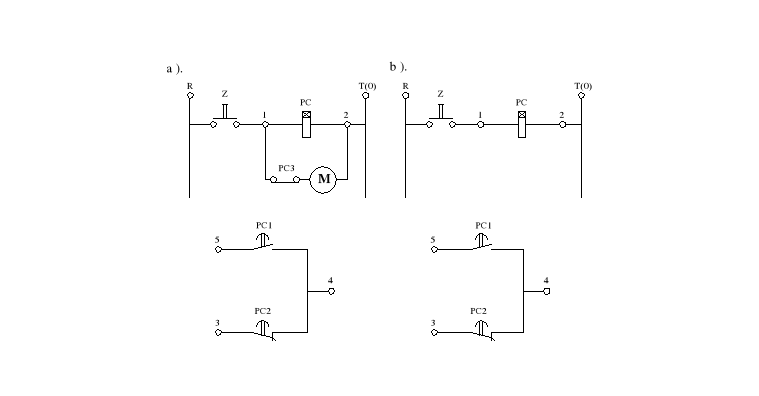
Rys. 5. Schemat ideowy przekaźnika czasowego synchronicznego: a) pełny b) uproszczony
Na rysunku 5b pokazany jest tylko obwód z cewką elektromagnesu PC oraz obwody ze stykami wykonawczymi zwiernymi PC1 oraz PC2.
Przycisk sterowniczy
Przycisk sterowniczy dwuobwodowy umożliwia załączenie i wyłączenie obwodu. Po naciśnięciu Z1 zamykamy obwód, urządzenie zostaje uruchomione. Po naciśnięciu Z2 przerywamy obwód - urządzenie zostaje zatrzymane.
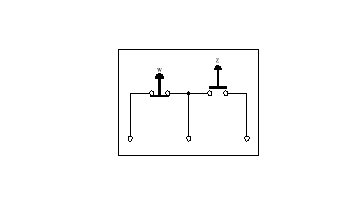
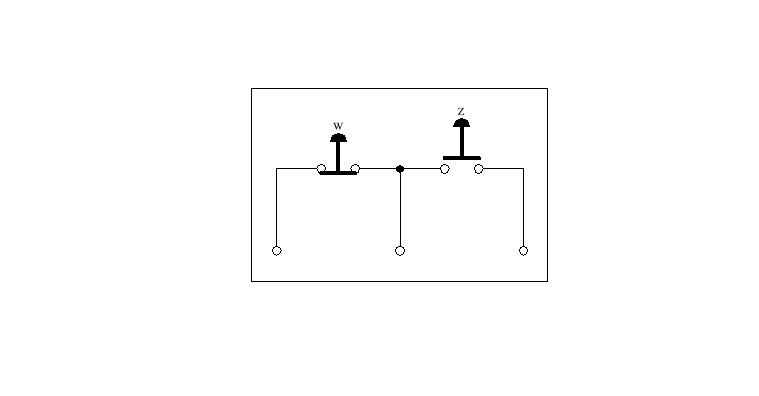
Konstrukcja przedstawiona na rysunku 6 umożliwia dołączenie kilku przycisków sterowniczych dwuobwodowych, dzięki czemu można zdalnie uruchamiać i zatrzymywać urządzenie z kilku miejsc. W tym przypadku wszystkie przyciski załączające łączy się równolegle, wyłączające - szeregowo.
Z - przycisk załączający
W - przycisk wyłączający
Rys. 6. Układ przycisku sterowniczego dwuobwodowego
Łącznik drogowy
Łączniki drogowe (krańcowe) spełniają zasadniczo tę samą rolę, co przyciski sterownicze. Różnica polega jedynie na tym, że przyciski sterownicze naciska obsługujący, zaś wyłączniki drogowe uruchamiane są przy pomocy mechanicznie poruszanych zderzaków. Dlatego wyłączniki drogowe muszą być mocniejsze od przycisków sterowniczych i powinny mieć specjalną konstrukcję w zależności od zastosowania.
Wybrane układy sterowania pracą silników indukcyjnych
Układ jednokierunkowego sterowania pracą silnika za pomocą stycznika
W większości przypadków stycznik posiada nadprądowe przekaźniki cieplne, służące do zabezpieczania przed skutkami przeciążeń (rysunek 7).
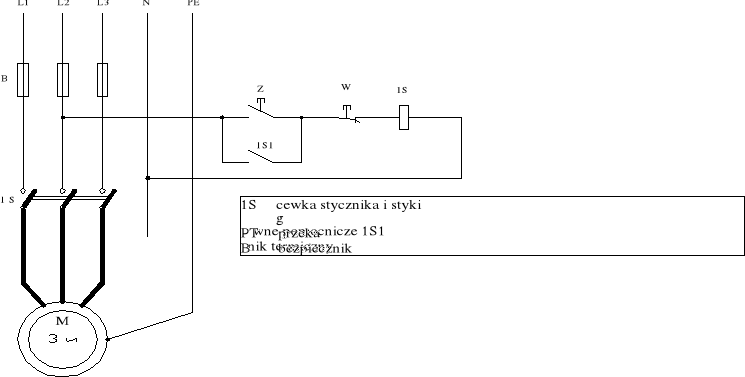
Rys. 7. Przykład realizacji obwodu sterowania silnikiem klatkowym
Po naciśnięciu przycisku sterującego Z zamyka się obwód cewki stycznika 1S. Przez cewkę 1S płynie prąd, zamykają się zestyki główne 1S w obwodzie głównym silnika oraz zestyki 1S1 pomocnicze tzw. trzymające, które bocznikują przycisk Z, w obwodzie sterującym. Silnik zostaje załączony do sieci i biegnie tak długo dopóki nie wyłączymy go przy pomocy przycisku O lub, gdy nie otworzą się zestyki przekaźnika termicznego PT, w przypadku przegrzania uzwojeń silnika.
Blokada elektryczna
Blokada w układach elektrycznych może mieć na celu wykluczenie pewnych czynności lub też dopuszczenie pewnych czynności po spełnieniu warunku lub szeregu warunków. Uszkodzenie blokady może być powodem zakłóceń lub awarii. Rozróżniamy następujące rodzaje blokad :
blokadę wykluczającą działanie pewnego silnika lub mechanizmu jeśli działa drugi silnik lub mechanizm np. jeśli jest ruch wyciągu osobowego w górę, należy zablokować impulsy dające ruch w dół.
blokadę kolejnościową (kaskadową) umożliwiającą np. kolejność załączania silników dopiero po spełnieniu warunków wynikających z ustalonego programu pracy.
Poniżej będą rozpatrzone schematy najbardziej typowych układów z zastosowaniem blokad.
Blokada wykluczająca jednoczesne działanie dwóch silników
Zasada działania tego rodzaju blokady polega na wykorzystaniu zestyków rozwiernych obu styczników jak na rysunku 8.
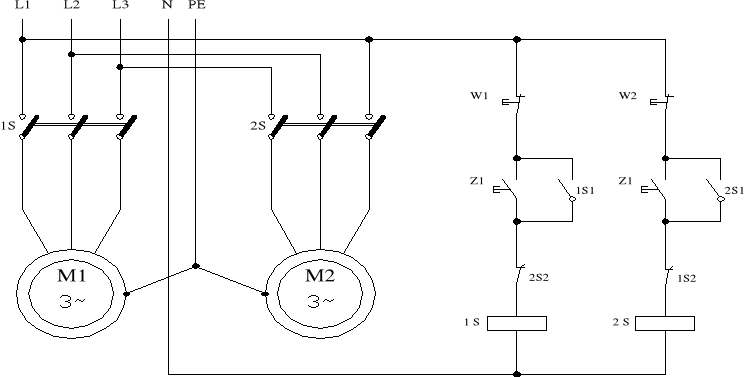
Rys. 8. Blokada wykluczająca ruch drugiego silnika
W danej chwili może pracować silnik M1 albo silnik M2. Obie maszyny mogą być również wyłączone. Niedopuszczalna jest jednoczesna praca obu silników. Działanie układu sterowania przebiega następująco: silnik M1 zostaje załączony dzięki zadziałaniu stycznika 1S, którego styki pomocnicze rozwierne (blokujące) 1S2, umieszczone w obwodzie sterującym silnika M2, zostają otwarte, uniemożliwiając zamknięcie obwodu sterującego stycznika 2S. Dopiero po wyłączeniu z ruchu silnika M1, czyli po zamknięciu zestyków blokujących 1S2, mamy możność uruchomienia silnika M2. Ta zasada blokady wykluczającej jest również przyjęta przy sterowaniu silnikiem w układzie pracy nawrotnej (rys. 9).
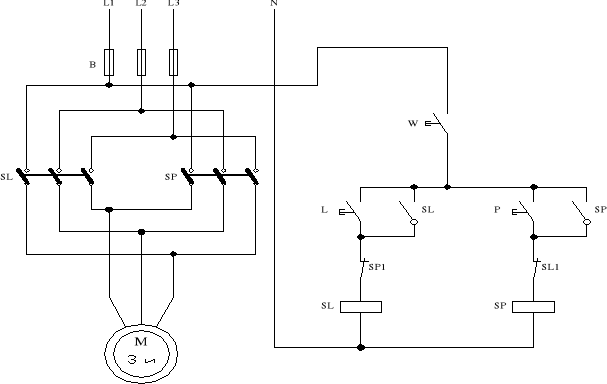
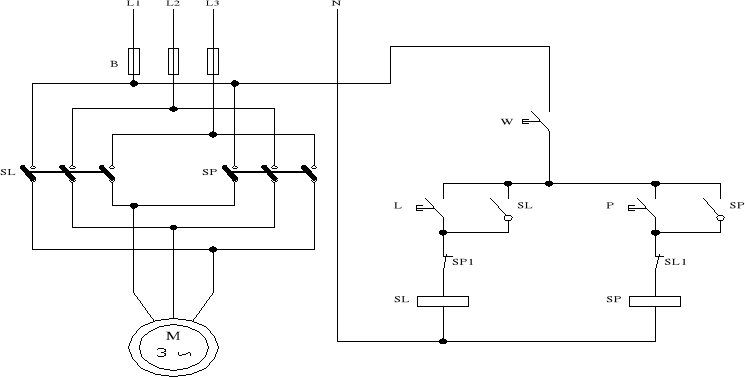
rys. 9 Sterowanie silnika przy pracy nawrotnej
SL, SP - styczniki kierunkowe
SP1, SL1 - zestyki pomocnicze blokujące
PT - przekaźnik termiczny
Pracę nawrotną realizujemy za pomocą dwóch styczników kierunkowych SP i SL. Zestyki rozwierne SP1 i SL1 tych styczników tworzą blokadę uniemożliwiającą jednoczesne zamknięcie obu styczników, co spowodowałoby zwarcie.
Niekiedy blokadę elektryczna wzmacnia się blokadą mechaniczną celem ewentualnego wykluczenia zamknięcia obu styczników np. w przypadku awarii lub zespawania zestyków stycznika.
Blokada kolejnościowa
Niekiedy w układach napędowych lub w innych układach sterowania zależy na ustaleniu kolejności wykonywanych czynności np. w obrabiarce należy uprzednio uruchomić wrzeciono, a następnie podać obrabiany materiał. Należy w tym celu uruchomić uprzednio silnik M1 a następnie silnik M2 tzn. należy wykluczyć możliwość wcześniejszego uruchomienia silnika M2. Układ sterowania kolejnościowego pokazany jak na rysunku 10. Blokadę kolejnościową realizujemy przy pomocy zestyku 1S2 (zestyk zwierny stycznika 1S).
Dopóki nie będzie zamknięty stycznik 1S tj. dopóki silnik M1 nie będzie załączony, w obwodzie sterującym silnika M2 będzie istniała przerwa ze względu na otwarty zestyk 1S2 i wszelkie próby uruchomienia tego obwodu przy pomocy przycisku Z2 okażą się bezskuteczne.
Wyłączenie silnika M1 przy pomocy przycisku 01 powoduje automatycznie zatrzymanie silnika M2, gdyż jego obwód sterujący zostaje przerwany przez zestyk 1S2.
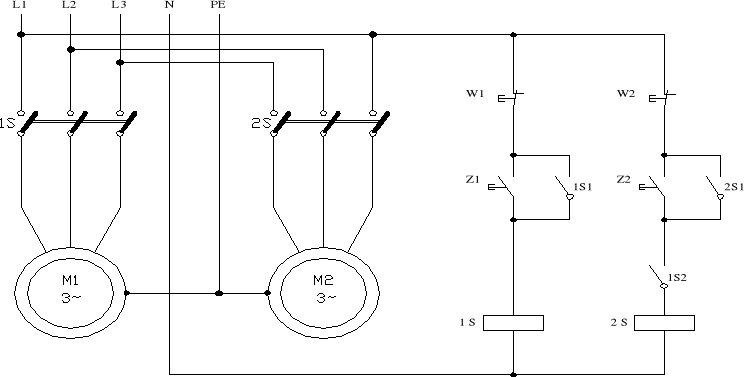
Rys. 10. Układ sterowania z zastosowaniem blokady kolejnościowej
Przebieg ćwiczenia
Zapoznanie się z aparaturą napędową i sterowniczą na stanowisku badawczym w laboratorium.
Korzystając ze schematów ideowych podanych w instrukcji zbudować układy wskazane przez prowadzącego ćwiczenie. Przyłączając do sieci (przez zabezpieczenie) obwód sterujący przeprowadzić próby tej części układu, a następnie rozruch całego układu. Zwrócić uwagę na poprawne połączenie przewodu ochronnego PE.
Należy pamiętać o tym, że napięcie znamionowe cewek zastosowanych styczników wynosi 230V.
Sprawdzić poprawność działania układu.
Włączenie napięcia - wyłącznie za zgodą prowadzącego zajęcia.
W sprawozdaniu podać schematy badanych układów narysowane zgodnie z zaleceniami prowadzącego ćwiczenie oraz opis działania.
Pytania sprawdzające i zadania
Czym różni się sterowanie automatyczne od regulacji?
Podać zasadę działania stycznika i przekaźników opisanych w instrukcji.
Z czego wynika obecność siły działającej na zworę dowolnego łącznika elektromagnetycznego?
Jaki cel ma sterowanie aparatury umożliwiającej sterowanie automatyczne?
Wskazać różnice w budowie przekaźnika i stycznika.
Do czego służą zestyki robocze i zestyki pomocnicze stycznika?
Na czym polega funkcja samopodtrzymywania zasilania cewki stycznika?
Jak oznacza się na schematach: przycisk zwierny, przycisk rozwierny, stycznik, bezpiecznik topikowy, przekaźnik, żarówkę, zestyki?
Ile wynosi napięcie skuteczne fazowe i przewodowe sieci zasilającej oraz jego częstotliwość?
Szeregowo ze źródłem zasilania połączono: przycisk zwierny, przycisk rozwierny i żarówkę. Podać stan każdego z przycisków, przy którym żarówka zaświeci.
Zaproponować układ sterowania świeceniem dwóch żarówek zrealizowany przy pomocy możliwie małej liczby elementów sterowania automatycznego. Obie żarówki znajdują się w tym samym miejscu (pulpit kontrolera) i sygnalizują kontrolerowi obecność pracowników w pomieszczeniach A i B, zgaśnięcie żarówki oznacza opuszczenie pomieszczenia. Przeanalizować następujące warianty:
zaświecenie żarówki wymaga ciągłego naciskania na przycisk sterujący,
zaświecenie żarówki wymaga zwolnienia przycisku sterującego,
zaświecenie żarówki wymaga jednokrotnego naciśnięcia przycisku zwiernego, a zgaszenie - jednokrotnego naciśnięcia przycisku rozwiernego.
Literatura
Miedziński B. Elektrotechnika. Podstawy i instalacje elektryczne PWN 2000
Michel K., Sapiński M. Czytam rysunek elektryczny WSiP 1996
Chmielarz J. Projektowanie elektrycznych urządzeń sterowania, blokady i sygnalizacji WNT Warszawa 1966
SPIS TREŚCI
1. Cel ćwiczenia 3
2. Wprowadzenie 3
2.1 Sterowanie automatyczne 3
2.2 Podział układów sterowania automatycznego 4
2.3 Symbole graficzne 4
3. Elementy układów sterowania automatycznego 6
3.1 Stycznik elektromagnetyczny 6
3.2 Przekaźniki elektromagnetyczne pośredniczące 7
3.3 Przekaźnik czasowy zwłoczny 8
3.4 Przycisk sterowniczy 9
3.5 Łącznik drogowy 10
4. Wybrane układy sterowania pracą silników indukcyjnych 10
4.1 Układ jednokierunkowego sterowania pracą silnika za pomocą stycznika 10
4.2 Blokada elektryczna 11
4.2.1 Blokada wykluczająca jednoczesne działanie dwóch silników 11
4.3 Blokada kolejnościowa 12
5. Przebieg ćwiczenia 13
6. Pytania sprawdzające i zadania 14
15
Wyszukiwarka