najobszerniejsza podgrupa przekształceń rzutowych
1.Fotogrametria i teledetekcja, fotointerporetacja.
1) Fotogrametria: dział nauki zajmujący się określaniem położenia, wymiarów i kształtu obiektów przestrzennych na podstawie zdjęć
2)Teledetekcja - badanie wykonane z pewnej odległości. Metody teledetekcyjne dzielą się na aktywne i pasywne. W aktywnej teledetekcji sygnał jest wysłany z instrumentu, a po odbiciu od obiektu, odbierany i analizowany, np. radar. Pasywnymi metodami teledetekcji są metody oparte na analizie sygnału wysyłanego od obserwowanego obiektu. Zdjęcie fotograficzne jest przykładem teledetekcji pasywnej
3)Fotointerpretacja - postępowanie mające na celu rozpoznanie i identyfikację obiektów, zjawisk i procesów zachodzących na powierzchni Ziemi, a odwzorowanych na zdjęciach lotn. lub satelitarnych; rozróżnia się: f. kameralną — przeprowadzaną w warunkach laboratoryjnych na podstawie obserwacji wizualnych z wykorzystaniem instrumentów ułatwiających widzenie stereoskopowe, f. polową — wykorzystującą obserwacje przeprowadzane w terenie, i f. kombinowaną (polowo-kameralną)
2.Czym się charakteryzują fotogrametryczne metody pomiaru
1)Są pomiarami pośrednimi
2)Polegają na mierzeniu obrazu obiektu
3)Ciężar prac jest w laboratorium (war. Kameralne)
4)Głównie pomiar fotopunktów (posiada wsp geodezyjne i jest jednoznacznie identyfikowalny na zdjęciu)
5)Dokumentalny charakter tworzony w oparciu o pamiary fotogrametryczne
6)Obiektywny charakter
3.Podział fotogrametrii w zależności od metod opracowania zdjęć.
1)Fotogrametria lotnicza (aerofotogrametria)
2)Fotogrametria satelitarna
3)Fotogrametria naziemna (terrofotogrametria)
4.Podział fotogrametrii ze względu na ilość zdjęć wykorzystanych zdjęć w trakcie opracowania.
1)Graficzne (najprostsze, mało dokładne)
2)Analityczne
3)Analogowe (służyły do wykonania rysunku obiektów w rzucie ortogonalnym)
4)Ortograficzne
5)Cyfrowe
5.Podział fotogrametrii ze względu na miejsce wykonania zdjęć.
1)Jednoobrazowa
2)Dwuobrazowa (stereoskopia)
6.Scharakteryzować metody opracowania zdjęć.
Metody opracowania zdjęć |
|||||
Grupa metod |
Ilość zdjęć |
Dane początkowe |
Przyrządy |
Etapy prac |
Wyniki opracowań |
Analityczne |
1,2 + |
-elementy orientacji wewn. kamery -współrzędnr XY lub XYZ fotopunktów |
- monokomparator - stereokomparator - komputer - ploter - autograf analityczny |
- pomiar współrz. tłowych - obliczenia wybranymi programami - wizualizacja wyników
|
- wykaz współrz. XY lub XYZ - FNMT - mapa kreskowa - profile terenu - tematyczne informacje o terenie |
Analogowe |
2 |
- elementy orient. wewn. kamery -wspołrz. XYZ fotopunktów |
- autograf - koordynatograf - przystawka rejestrująca |
-orientacja wzajemna - orientacja bezwzględna - opracowanie właściwe |
- mapa kreskowa syt. - wys. - profile terenu - wykaz współrz. XYZ - FNMT |
Ortograficzne
-fotomechaniczna
- technika ortofoto
|
1
2 |
- wspórz. XY fotopunktów
- jak w metodach analogowych |
- przetwornik fotomechaniczny
- autograf z przystawką ortofoto - automatyczne systemy ortofotograficzne
|
- strojenie zdjęcia - naświetlanie
-orientacja wzajemna i bezwzględna - przetwarzanie różniczkowe |
- fotomapa
- ortofotomapa - ortograf |
Cyfrowe |
1,2 + |
- elementy orient. wewn. kamery - dane z kalibracji kamery - współrz. XYZ fotopunktów
|
- fotogrametryczne stacje cyfrowe - autografy analogowe |
- skanowanie zdjęć - pomiar współrz. tłowych - obliczenia wybranymi programami - wizualizacja wyników |
- wykaz współrz. XYZ - FNMT - ortofotografia - ortofotomapa - fotomapa - mapa kreskowa - profile terenu - tematyczne informacje o terenie |
7.Czym się charakteryzują analityczne metody opracowania zdjęć?
Matematyczne sformułowanie i rozwiązanie zależności geometrycznych jakie zachodzą pomiędzy terenem (obiektem) i jest obrazem na zdjęciu ( zdjęciach ). Wykorzystując odp. formuły matematyczne przelicza się wsp. tłowe na współrzędne w układzie terenowym ( zewnętrznym ).
8.Czym się charakteryzują analogowe metody opracowania zdjęć?
W tej metodzie bazujemy na instrumentach analogowych - otrzymujemy mapę, postać kartometryczna, a nie wsp.
9.Czym się charakteryzują ortofotograficzne metody opracowania zdjęć?
tabelka wyżej
10.Czym się charakteryzują cyfrowe metody opracowania zdjęć?
tabelka wyżej
11.Krzywa charakterystyczna materiału światłoczułego.
Krzywa charakterystyczna - krzywa charakterystyczna jest graficznym przedstawieniem na układzie współrzędnych gęstości wyrażonej funkcją ekspozycji. Jest nią zobrazowana zależność między gęstością a ekspozycją. Im gęstość emulsji większa, tym slajd jest mniej "przezroczysty" - ciemniejszy ze względu na większe zaczernienie; im gęstość mniejsza tym slajd staje się bardziej "przezroczysty" - biały przy oglądaniu. Ekspozycja wyrażona jest za pomocą logarytmu dziesiętnego z natężenia światła i czasu jego oddziaływania na materiał. Takie ujęcie sprawy oznacza, że zwiększenie ekspozycji (wyrażonej log dziesiętnym) o jedna działkę oznacza dziesięciokrotne zwiększenie naświetlania i odwrotnie
gęstość optyczna (D) logarytm ekspozycji (H)
Przedstawia ją układ współrzędnych (f to liczba przesłony):
D = f (log H)
12.Co to są głębia ostrości i odległość hiperfokalna?
Głębia ostrości - parametr stosowany w optyce i fotografii do określania zakresu odległości, w którym obiekty obserwowane przez urządzenie optyczne sprawiają wrażenie ostrych.
Na zakres głębi ostrości mają wpływ następujące czynniki:
przysłona - im mniejszy otwór względny jest pozostawiony (czyli: czym wyższa liczba przysłony, np. 16 lub 22), tym większa głębia;
budowa obiektywu fotograficznego - im dłuższa ogniskowa, tym mniejsza głębia ostrości;
odległość na jaką ustawiona jest ostrość obiektywu (odległość między przemiotem a aparatem) - im odległość ta jest mniejsza, tym głębia ostrości również.
wymiary błony światłoczułej lub sensora używanych do rejestracji obrazu.
Dla obliczenia strefy ostrości wystarczy użyć wzoru:
T = k × u(1+m)
T - strefa ostrości, k - liczba przesłony, u - wielkość krążka rozproszenia, m - skala odwzorowania.
Odległość hiperfokalna to mierzona od aparatu fotograficznego lub kamery odległość, na którą trzeba ustawić ostrość, by uzyskać jak największą głębię ostrości, czyli przestrzeń, w której obiekty wydają się ostre. Inaczej mówiąc, jest to najmniejsza odległość, na którą trzeba ostrzyć, by głębia ostrości kończyła się w nieskończonej odległości (ostrość "po horyzont"). Głębia ta, zaczyna się w połowie odległości między aparatem, a odlegością hiperfokalną i kończy w nieskończoności.
Odległość hiperfokalna zależy od konkretnej wartości przysłony oraz ogniskowej obiektywu, a do jej ustawienia przydatna jest skala głębi ostrości nanoszona na obudowach wielu obiektywów.
13.Budowa i zasada działania kamery pomiarowej.
Elementy podstawowe:
1)Korpus kamery służy do pomieszczenia stożka obiektywowego, nazywanego również
blokiem optycznym.
2)Kaseta (ładownik) - jest przeznaczona do pomieszczenia materiału światłoczułego i
stopniowego przewijania go w czasie między kolejnymi ekspozycjami.
3)Podwieszenie służy do umocowania korpusu kamery do podłogi samolotu w ten sposób,
aby obiektyw znalazł się nad otworem, przez ktory są wykonywane zdjęcia.
4)Stożek obiektywowy stanowi najważniejszy element kamery lotniczej. W dolnej części
stożka jest umieszczony obiektyw, wewnątrz którego wmontowana jest przysłona i migawka
aparatu
5)Urządzenie sterujące jest pomocniczym elementem kamery lotniczej, który reguluje rytm
pracy i współdziałanie poszczególnych jej mechanizmów.
Etapami cyklu pracy kamery lotniczej są:
1)przewinięcie błony fotograficznej,
2)naciągnięcie migawki,
3)wyrównanie błony fotograficznej w płaszczyźnie ramki tłowej,
4)ekspozycja.
14. Podstawowe warunki techniczne wykonania zdjęć lotniczych
1)Wybór odpowiednich warunków technicznych powinien uwzględniać:
2)Charakter terenu
3)Technologie opracowania mapy
4)Skale opracowywanej mapy (1:M)
5)Skale zdjęć lotniczych (1:m), a tym samym przekładnie skalową K
6)Wysokość fotografowania W
7)Typ kamery lotniczej, stałą kamery fk, oraz format zdjęć
8)Prędkość samolotu, oraz maksymalny dozwolony czas naświetlania t max
9)Pokrycie podłużne Px, oraz poprzeczne Py zdjęć
10)Rodzaj materiału światłoczułego, warunki fotografowania i obróbki laboratoryjnej
Bx - baza fotografowania podłużna.
By - baza fotografowania poprzeczna
Parametry:
Pxo - pokrycie 60%
Py0 - pokrycie poprzeczne ok. 25-30 %
Px = Px0 % + 50 *dH/W , W- średnia wysokość, dH - deniwelacja maksymalna
Py0 = 25% dla W < 1500m
Py0 = 30% dla W > 1500m
Py = Py0 % + 70 *dH/W
15. Punkty i linie szczególne na zdjęciu pomiarowym
Punkty szczególne - leżą w jednej linii największego spadku zdjęcia. Zajmują określone położenie w stosunku do kata nachylenia zdjęcia, środka rzutów i odl obrazowej f. ich położenie jest określane w stosunku do pkt głównego o.
pkt główny znajduje się w przecięciu lnii łączących przeciwległe znaczki tłowe.
Pkt nadirowy leży na linii największego spadku i jest punktem zbiegu wszystkich elementów (linii) pionowych (prostopadłych do płaszczyzny a).
pkt izocentryczny leży na linii największego spadku, wszystkie kierunki prowadzone przez ten pkt nie sa zniekształcone ze względu na wpływ kąta nachylenia zdjęcia, skala wzdłuż linii h h prostopadłej do vv w pkt i jest stała i niezniekształcona mimo nachylenia zdjęcia. pkt przecięcia dwusieczna kata nachylenia zdjęcia.
Główny pkt zbiegu pkt przebicia płaszczyzny zdjęcia prosta prostopadła do linii zbiegu zz i przechodząca przez środek rzutów s. pkt zbiegu wszystkich linii płaszczyzny a równoległych do vv.
Linia największego spadku: główna pionowa zdjęcia, znajdująca się na niej wszystkie punkty szczególne.
Linia zbiegu zz - linia horyzontu hh, jest na niej pkt główny zbiegu oraz inne pkt zbiegu, które biegną pod katem 45' do linii vv, w płaszczyźnie przedmiotu a.
Główna linia pozioma h0h0 - linia prostopadła do linii największego spadku, przechodząca przez pkt główny zdjęcia.
Linia nie zniekształconej skali hi hi - linia równoległa do linii hoho, przechodząca przez pkt izocentryczny i.
16.Co to są i do czego służą elementy orientacji wewnętrznej zdjęć pomiarowych?
Liczbowa wartości: stałej kamery i wsp punktu głównego w układzie wyznaczonym przez znaczki tłowe, ich znajomośc jest niezbędna do rekonstrukcji promieni rzutujących.
17.Co to są i do czego służą elementy orientacji zewnętrznej zdjęć pomiarowych?
Służa do określenia płaszczyzny rzutów. Są to trzy wsp określające położenie środka rzutów w układzie wsp prostokątnych X, Y, Z oraz kąty określające nachylenie i skręcenie kamery: Ω, Ф, қ.
18.Co to są i do czego służą elementy orientacji wzajemnej zdjęć pomiarowych?
Są to wielkości, które pozwalają na odtworzenie wzajemnego położenia pary zdjęć tworzącej stereogram. Mogą one wynikać z elementów orientacji zewnętrznej zdjęć. Jeżeli utworzymy różnice pomiędzy odpowiadającymi sobie wielkościami elementów orientacji zewnętrznej prawego i lewego zdjęcia stereogramu to utworzymy układ elementów orientacji wzajemnej zdjęć, określający położenie w przestrzeni prawego zdjęcia względem lewego.
Elementy orientacji wzajemnej:
by, bz, Δқ, ФΔ, Δω lub қ', қ'', Ф', Ф'' Δω;
by, bz - składowe bazy fotografowania, Ф' - kąt nachylenia podłużnego lewego zdjęcia, mierzony w głównej płaszczyźnie rdzennej lewego zdjęcia, Δω - kąt dwuścienny zawarty między głównymi płaszczyznami rdzennymi lewego i prawego zdjęcia, қ' - kąt skręcenia lewego zdjęcia w jego płaszczyźnie
19.Co to są i do czego służą elementy orientacji bezwzględnej modelu stereoskopowego?
Współczynnik zmiany skali m oraz kąty obrotu Ω, Φ, κ oraz przesunięcie układu czyli xs, ys i zs. Jeżeli różnica skal układów nie jest jednakowa wzdłuż 3 osi to dodatkowo zamiast m pojawią się współczynniki mx, my, mz. Służą one przekształceniu lokalnego układu współrzędnych modelu na układ geodezyjny terenowy. Do przekształcenia konieczne są co najmniej 3 fotopunkty, czyli punkty o znanych współrzędnych w terenie.
20.Fotoszkic, fotomapa i ortofotomapa.
Fotoszkic - obraz terenu zestawiony z nieprzetworzonych, pionowych lub nachylonych zdjęć lotniczych dopasowanych wzajemnie na podstawie obrazu sytuacji terenowej. Może być niekiedy uzupełniony elementami mapy topograficznej wkreślonymi odręcznie lub w procesie reprodukcji. Fotoszkice zestawia się dla oddzielnych rubieży lub rejonów. Ze względu na stosunkowo małą dokładność pomiarową fotoszkiców wykorzystuje się je zazwyczaj łącznie z mapą topograficzną lub fotomapą. W razie braku map topograficznych wojska mogą być zaopatrywane w fotoszkice.
Fotomapa - mapa fotograficzna uzyskana drogą przetwarzania zdjęć (lotniczych)
Ortofotomapa - mapa fotograficzna uzyskana drogą przetważania różniczkowego; można ją uzyskać metodą analogową lub cyfrową.
21.Skala zdjęcia pomiarowego
- przy znajomości Ck i wys. lotu W
Ck/W = 1/Mz
Mz=W/Ck
-gdy nie dysponujemy takimi samymi danymi wówczas musimy mieć mapę topograf. i porównujemy odcinki wyznaczane na zdj. z tymi danymi z mapy. One powinny być zorientowane wzdłuż prostych najw. spadku i gł. poziomej zdj. Wtedy:
Mz = D/d , D - odcinka z mapy topograf. , d - dł. odc. na zdjęciu
22.Przesunięcie punktów zdjęcia jako funkcja kąta nachylenia.
Punkty zdjęcia nachylonego w stosunku do odpowiednich punktów zdjęcia poziomego są przesunięte. Przesunięcie to jest funkcją kąta nachylenia v i zależy także od położenia punktu na zdjęciu. Przesunięcie dv punktu ze względu na występowanie kąta nachylenia v wynosi (ai - a0i)
23.Przesunięcie punktów zdjęcia lotniczego jako funkcja deniwelacji terenu.
Deniwelacje terenu powodują radialne (w stosunku do punktu nadirowego N) przesunięcie
obrazu punktów położonych powyżej lub poniżej płaszczyzny odpowiadającej średniej wysokości terenu T. W rezultacie punkty terenu A i B, których rzut ortogonalny na płaszczyznę T odpowiednio A0 i B0 odfotografowują się na zdjęciu jako punkty A' i B'. Położenie tych punktów należy więc skorygować o wartość dr, doprowadzając do położenia A'0 i B'0. W przypadku punktu A, który leży poniżej płaszczyzny T, korekta będzie polegała na przesunięciu jego położenia o wielkość r'A w kierunku od punktu nadirowego, natomiast w przypadku punktu B, leżącego powyżej płaszczyzny T, na przesunięciu położenia o odcinek r'B skierowany do punktu nadirowego. Wpływ deniwelacji terenu na położenie obrazu punktu jest tym większy, im bardziej jest on oddalony od punktu nadirowego, im większe jest przewyższenie tego punktu w stosunku do średniej wysokości terenu oraz im mniejsza jest wysokość fotografowania. Minimalne zniekształcenia występują w przypadku terenu równinnych i w środkowej części użytecznego pola zdjęcia. Należy zaznaczyć, że praktycznie, w przypadku zdjęć prawie pionowych, poprawkę r'B odkładamy
na promieniu dr'B wykreślonym z głównego punktu zdjęcia O', gdyż prawie pokrywa się on z
punktem nadirowym N'. Wpływ tej nieścisłości jest znikomy i nie przekracza granic dokładności graficznej.
24.Czynniki geometryczne i fizyczne wpływające na zniekształcenie obrazu zdjęcia lotniczego.
Deniwelacja terenu, dystorsja obiektywu, szczątkowe wady obiektywu, skręcenie osi ( omega, fi, kappa ), refrakcja, rozmazanie, deformacja podłoża emulsji światłoczułej, wpływ niepłaskości emulsji fotograficznej, krzywizna ziemi.
25.Zasady stereoskopowego widzenia.
1. Czynniki związane z procesem fotografowania:
- wykonanie zdjęć z dwóch różnych pkt. przestrzeni ( baz fotografowania ) - podobna odległość od obiektu
- wykonanie takich zdjęć żeby skale lewego i prawego były w przybliżeniu jednakowe ( dopuszczalna różnica 15% )
- Promienie rzutujące wykonanie zdjęć nie powinny przecinać się pod kątem większym od 15%
- Pokrycie podłużne zdjęć 60%, poprzeczne 20-40%
2. Czynniki ograniczające uzyskanie efektu stereoskopowego
-konieczność prowadzenia obserwacji punktów modelu stereoskopowego w płaszczyznach rdzennych
-prowadzenie obserwacji zdjęć z odległości najlepszego widzenia
-odpowiednie ułożenie zdjęć do obserwacji ( zdjęcie lewe stereogramu powinno być obserwowane lewym okiem, a prawe zdjęcie - prawym
26.Skala modelu stereoskopowego.
Wyróżniamy skalę poziomą oraz pionową skalę wysokościową. Skala modelu zależy od sposobu odtwarzania elementów orientacji wewnętrznej zdjęć. Są 2 przypadki: jeżeli jest zachowana wiernokątność wiązek promieni rzutujących oraz gdy wiązki promieni rzutujących nie są wiernokątne w stosunku do promieni przy fotografowaniu.
1/M(Z)=1/M(x,y) *k = bp/B * fp/fk, bp- baza projekcji, B - baza fotografowania, fp - wiązka projekcji, fk - wiązka promieni przy fotografowaniu. Gdy fp>fk to skala pionowa będzie większa od skali poziomej(k>1) co oznacza, ze model będzie wyciągnięty w kierunku pionowym, gdy fp<fk skala pionowa będzie mniejsza od skali poziomej (k<1) model będzie spłaszczony.
27.Podaj czynniki warunkujące uzyskanie efektu stereoskopowego.
Uzyskanie modelu stereoskopowego uzależnione jest od pewnych czynników:
1. Czynniki związane z procesem fotografowania:
- Wykonanie zdjęć z dwóch rożnych punktów przestrzeni (baz fotografowania) - podobna
odległość od obiektu,
- Wykonanie takich zdjęć żeby skale zdjęci lewego i prawego były w przybliŜeniu
jednakowe (dopuszczalna różnica 15%)
- Promienie rzutujące wykonanych zdjęć nie powinny przecinać się pod kątem większym
od 15o.
- Pokrycie podłużne zdjęć 60%, poprzeczne 20 - 40%.
2. Czynniki ograniczające uzyskanie efektu stereoskopowego:
- Konieczność prowadzenia obserwacji punktów modelu stereoskopowego w
płaszczyznach rdzennych
- Prowadzenie obserwacji zdjęć z odległości najlepszego widzenia
- Odpowiednie ułożenie zdjęć do obserwacji (zdjęcie lewe stereogramu powinno być obserwowane lewym okiem, a prawe zdjęcie - prawym
28.Co to są fotogram i stereogram?
Fotogram - pojedyncze zdjęcie
Stereogram - para odpowiednio pokrywających się zdjęć, muszą one być wykonane z
dwóch stanowisk (z bazy) usytuowanych w podobnej odległości od obiektu, zdjęcia powinny być poprawnie zorientowane i nadające się do obserwacji stereoskopowej.
29.Co to są: oś rdzenna, punkty rdzenne, płaszczyzna rdzenna i promienie rdzenne?
Płaszczyzna rdzenna: płaszczyzna przechodząca przez bazę obserwacyjną
Płaszczyzna rdzenna wyznaczona jest przez obydwa ośrodki rzutów O1 i O2 (oś rdzenną)
oraz punkt A, B … (lub inny punkt w przestrzeni przedmiotowej) obfotografowany na
obserwowanych zdjęciach. Odpowiadające sobie promienie rdzenne r'a i r''a czy r'b i r''b
przecinają się na krawędzi przecięcia płaszczyzn obrazów KK.
O1 i O2 - baza obserwacyjna
Rys. 1.38. Przekroje poziome: a) i b) przez bazę oczną, c) przez bazę zdjęć: a) i b) główna płaszczyzna
obserwacji określona punktami O1, O2, F, f1, f2; Ff1 oraz Ff2 — osie oczu; różnica f1a1 - f2a2 jest paralaksą
fizjologiczną punktu A; c) płaszczyzna rdzenna O1O2A ; punkty rdzenne R1 i R2 promienie rdzenne r'a i r''a
30.Wymień i scharakteryzuj rodzaje efektów stereoskopowych.
W zależności od ułożenia zdjęć względem siebie może być uzyskany jeden z trzech
rodzajów efektu stereoskopowego:
- efekt ortoskopowy - przy którym model utworzony z pary zdjęć lotniczych ma
ukształtowanie pionowe zgodne z naturalnym tzn. wzniesienia terenowe są skierowane w
stronę obserwatora. Bazy fotografowania zajmuje położenie „do wewnątrz”.
- efekt pseudoskopowy - przy którym następuje zmiana ukształtowania pionowego, tzn.
formy wypukłe obserwuje się jako wklęsłe, rzeki płyną grzbietami itp. Powstaje na skutek
obserwacji zdjęcia lewego prawym okiem, a prawego lewym. Baza fotografowania na
zdjęciach zajmuje położenie „na zewnątrz”.
- efekt zerowy - (minimalny), przy którym zanika wrażenie plastyki. Teren płaski. Zdjęcie
lewe skręcone jest o 90o i obserwowane lewym okiem, a prawe jest także skręcone o 90o i
obserwowane prawym okiem. Efekt zerowy stosowany jest wtedy, gdy przy obserwowaniu stereogramu niepożądana jest obserwacja przestrzennego ukształtowania terenu.
Stereokomparator SK1818 - budowa oraz zasada pomiaru stereogramu
31.Stereokomparator SK1818 - budowa oraz zasada pomiaru stereogramu przy zastosowaniu tego instrumentu.
32.Autograf analogowy - stereometrograf - budowa oraz zasada pomiaru modelu przy zastosowaniu tego instrumentu.
33.Co to są paralaksa podłużna i paralaksa poprzeczna (od czego one zależą)?
Paralaksą podłużną p nazywamy różnice odciętych tłowych obrazu tego samego punktu na zdjęciach tworzących stereogram. p=x'-x”=Δx Paralaksa podłużna jest odcinkiem, którego długość jest funkcją odległości od bazy fotografowania. Im większa odległość Y do fotografowanego punktu, tym mniejsza jest jego paralaksa i odwrotnie.
Paralaksą poprzeczną q nazywamy różnicę rzędnych tłowych obrazu tego samego punktu na zdjęciach tworzących stereogram. Paralaksa poprzeczna nazywana jest także paralaksą wysokościową. q=y'-y”=Δy Paralaksa poprzeczna powstaje w wyniku różnicy wysokości (rzędnych) środków rzutów lewego i prawego zdjęcia stereogramu naziemnego.
34.Opracowanie zdjęć metodą analityczną - etapy prac na stereokomparatorze SK1818.
Czynności prowadzące do pomiaru zdjęć lotniczych na stereokomparatorze 1818 są
następujące:
l. Zakłada się zdjęcia na nośniki stereokomparatora, wpasowując ich znaczki tłowe w
specjalne nacięcia w postaci krzyży lub kresek, umieszczone w narożnikach nośników. W
ten sposób krzyż wryty ma środku nośnika materializuje położenie punktu głównego na
zdjęciu.
2. Ruchami x i y ustawia się lewy znaczek pomiarowy na punkcie głównym lewego
zdjęcia (obserwacja monokularna tylko lewego fotogramu), następnie ruchami x i py (nie
ruszając pokrętki y) ustawia się prawy znaczek : pomiarowy na punkcie głównym prawego
zdjęcia (również obserwacja monokularna tym razem prawego zdjęcia). Czynności te
23
należy sprawdzić. Wykonanie tego etapu strojenia można uznać za poprawne, jeżeli w
celu przejścia z obserwacji jednego punktu głownego do drugiego wystarczy wykonanie
ruchu X . Od tego momentu pokrętka ruchu py nie powinna być Używana w dalszym etapie
strojenia
3. Ruchami x ustawia się lewy znaczek pomiarowy w okolice lewego punktu głównego,
a następnie ruchem px oraz skręceniem prawego zdjęcia ustawia się prawy znaczek
pomiarowy na tym samym punkcie terenu. Początkowo obserwacja ma charakter
monokularny. Po odpowiednim zbliżeniu odpowiadających sobie obrazów uzyskuje się
efekt stereoskopowy terenu i wrażenie przestrzennego znaczka pomiarowego. Efekt ten
umożliwia dokładne usuwanie paralaksy poprzecznej poprzez skręcenie prawego nośnika
x"). Dla początkującego obserwatora zaleca się usuwanie paralaksy poprzecznej przy
rozdwojeniu znaczka pomiarowego wzdłuż osi x, tj. celowym zagłębieniu znaczka
pomiarowego wskutek ruchu px.
4. Ruchem x ustawia się znaczek pomiarowy w okolice prawego punktu głównego,
eliminując jednocześnie występującą paralaksę podłużną px, która zależy od
ukształtowania terenu.
Z wykorzystaniem efektu stereoskopowego eliminuje się występującą tutaj paralaksę
poprzeczną poprzez skręcenie lewego nośnika
5. Opisane wcześniej czynności zwane strojeniem wzdłuż bazy powtarza się aż do
całkowitego usunięcia paralaksy poprzecznej (p ) w okolicy obydwu punktów głównych.
6. Pomiar zdjęć lotniczych rozpoczyna się od pomierzenia współrzędnych i paralaks
punktów głównych, a następnie mierzy się wszystkie punkty wyznaczane. Oczywiście
pomiar każdego punktu powinien być wykonany dwukrotnie. Dopuszczalna różnica
odczytów poszczególnych wielkości dla początkującego obserwatora może osiągać kilka
setnych milimetra.
35. Etapy opracowania zdjęć na autografie analogowym
1.Prace przygotowawcze (wstępne) - a) Założenie stereogramu (negatywy lub diapozytywy) w nośniki autografu z dokładnym wpasowaniem znaczków tłowych w odpowiednie linie na nośnikach. b) Ustawienie liczników autografu na odczyty początkowe (ck, ω, φ, κ) dla lewego i prawego zdjęcia, składowe bazy (bx, by, bz). c) wybór skali modelu stereoskopowego w autografie. Korzysta się z diagramu w instrukcji autografu. Na podstawie znanej wysokości fotografowania W lub średniej skali zdjęć 1 : m, stałej kamery c κ, wybiera się skalę modelu 1 : mm. Dla wybranej skali modelu odczytuje się wartość z bezwzględnego (jest to wysokość lotu w skali modelu), którą wprowadza się na odpowiedni licznik autografu. Obserwując stereogram wprowadza się składową bx, do uzyskania efektu widzenia przestrzennego. Z tabeli w instrukcji autografu, dla skali modelu 1 : mm i wymaganej skali mapy 1 : mk, dobiera się właściwe, mechaniczne przekładnie skalowe (tryby), które zakłada się dla napędów ( osi X i Y) w koordynatografie. Z innej tabeli dobiera się właściwe tryby, zakładane w liczniku Z autografu, umożliwiające odczyty wysokości punktów w terenie w skali 1 : 1.d) Przygotowanie podkładu kartograficznego na koordynatografie (opis narożników siatki kwadratów arkusza mapy zgodnie z godłem mapy, naniesienie ze współrzędnych położenia fotopunktów).
2.Orientacja wzajemna polega na fizycznym odtworzeniu wzajemnego położenia zdjęć. Realizowana jest przez usuwanie paralaksy poprzecznej q na modelu stereoskopowym na punktach standardowych według określonego schematu: a) na 1 ruchem by i k'' b) 2 - k' c) 6 - bz d) 4 - ω'' e) 3 - φ'' f) punkt 5 jest punktem kontrolnym, jeżeli występuje tu paralaksa q=0, wtedy wykonuje się następną iteracją. Po wykonaniu orientacji wzajemnej paralaksa poprzeczna dla wszystkich punktów stereogramu powinna mieć wartość q=0.
3.Orientacja bezwzględna (skalowanie i poziomowanie modelu) - orientacja ta ma na celu wyskalowanie modelu w autografie, zgodnie z przyjętą przekładnią mm:mk i doprowadzenie do równoległości osi XYZ układu modelu z układem terenowym. Skalowanie wykonuje się przez porównanie długości odcinka między dwoma najbardziej odległymi fotopunktami na modelu (w autografie) i na podkładzie (na koordynatografie). Ruchami korb X i Y oraz tarczy nożnej Z naprowadza się znaczek pomiarowy w autografie na wybrany fotopunkt. Skalowanie modelu realizuje elementy orientacji bezwzględnej: m - skala modelu, k - obrót układu współrzędnych modelu wokół osi Z oraz wektor translacji model - teren (przez zgodność jednoczesnej obserwacji jednoimiennych fotopunktów na modelu i mapie). Poziomowanie polega na doprowadzeniu do równoległości płaszczyzny XY układów modelu i terenu (mapa). Na czterech fotopunktach mierzy się na wyskalowanym modelu ich wysokości (odczyty na liczniku Z autografu). Oblicza się różnicę wysokości między terenem a modelem i na ich podstawie, według wzorów podanych w instrukcji autografu, oblicza się wielkości poprawek D omega i delta fi. Poprawki te wprowadza się na liczniki omega i fi lewego i prawego zdjęcia. Kolejne iteracje prowadzą do określenia nowych poprawek. Proces ten kończy się gdy wysokości fotopunktów odczytane na modelu są zgodne z terenowymi.
4.Opracowanie właściwe - rysowanie mapy sytuacyjno - wysokościowej. Etap ten obejmuje obserwację i interpretację modelu przestrzennego w autografie. Na mapę przenosi się tę sytuację, która stanowi treść mapy kreskowej. Przedstawienie deniwelacji terenu to pomiar wysokości w charakterystycznych punktach oraz rysowanie warstwic.
36.Analityczne opracowanie stereogramu naziemnego.
37.Analityczne opracowanie stereogramu lotniczego.
38.Fototriangulacja a aerotriangulacja.
39. Klasyfikacja autografów
Kryterium |
Podział |
Rodzaj podwójnej projekcji |
Projekcja: optyczna, mechaniczna, optyczno- mechaniczna, matematyczna
|
Przeznaczenie autografu |
1.Uniwersalne (aerotriangulacja mapy) 2.Do kartowania |
Dokładność pracy autografu |
1.I kategorii mh <0.1%0 W 2.II kategorii 0.1% W <mh<0.25%0 W 3.III kategorii 0.25% W <mh<0.5%0 W |
Sposób odtworzenia wiązki promieni rzutujących |
1.Wiernokątna wiązka promieni rzutujących fp=fk 2.Niewiernokątna wiązka promieni rzutujących |
Mh - średni błąd opracowania wysokościowego
W - wysokość fotografowania
Fp - ogniskowa projekcji
fk - stała (ogniskowa) kamery
40.Zasada przetwarzania strefowego w metodzie fotomechanicznej.
41.Cechy obrazu pomiarowego.
42.Techniki pozyskiwania obrazu pomiarowego.
43.Podaj cechy fizyczne obrazu pomiarowego.
44.Podaj cechy matematyczne obrazu pomiarowego.
45.Podaj cechy semantyczne obrazu pomiarowego.
46.Charakterystyka systemów satelitarnych.
47.Analityczne opracowanie pojedynczego zdjęcia pomiarowego metodą przekształceń rzutowych płaszczyzny w płaszczyznę.
48. Układy współrzędnych wykorzystywane w fotogrametrii analitycznej.
- ukł. współrzędnych tłowych zdjęcia
- ukł. współrzędnych transformowanych
- ukł. współrzędnych modelu
- ukł. współrzędnych terenowych - geodezyjny
- ukł. współrzędnych - fotogrametrycznych
49.Układy współrzędnych tłowych wykorzystywane w fotogrametrii analitycznej.
50.Układy współrzędnych terenowych wykorzystywane w fotogrametrii analitycznej.
- ukł. geodezyjny ( B,L,H) lub geograficzny ( fi, lambda, H )
- układ geocentryczny X,Y,Z
- układ lokalnych współrzędnych X,Y,Z ( lub X,Y,Z )
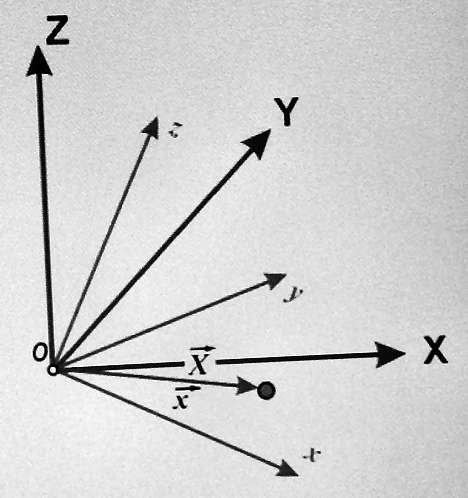
51.Układ współrzędnych transformowanych i układ współrzędnych normalnych.
52.Warunek kolinearności wektorów
Xt/Xn = Yt/Yn = Zt/Zn=-Ck
Xn= Xt*(-Ck)/Zt
Yn=Yt*(-Ck)/Zt
Zn=-Ck
Zdjęcie w położeniu pozytywowym
Wektor rb - wektor obrazowy wychodzący ze stanowiska naświetlenia zdjęcia D do pkt obrotu b
Wektor Rb - wektor przedmiotowy wychodzący ze stanowiska środka rzutow O do pkt przedmiotu B
Wektory te są kolinearne tzn jeden jest skalarny wielokrotnością drugiego, zatem rb=k
Rb gdzie k jest skalarem( współczynnikiem skali) równym stosunkowi IrbI : IRbI .
Punkt przedmiotu B, środek rzutów O i pkt obrazu b leżą na jednej prostej. Warunek ten może być zakłócony, gdyż zniekształcenie obrazu spowodowane dystorsją obiektywu, refrakcją atmosferyczną itp mogą spowodować odchylenie promienia od kolinearności - można je wyeliminować za pomocą poprawek.
53.Warunek komplanarności wektorów.
Dwa środki rzutów O1 i O2, punkt przedmiotu A oraz dwa obrazy tego punktu a' i a'' na
zdjęciu stereogramu leżą na wspólnej płaszczyźnie. jest to podstawowy warunek orientacji
wzajemnej i fotogrametrycznego wcięcia w przód. Warunek ten określa funkcja Fi, która
jest iloczynem mieszanym trzech wektorów i równa się zeru. Fi = B R1i x R2i = 0
Jedno równanie określające komplanarność trzech wektorów B, R1, R2 można zapisać dla
każdego punktu przedmiotu.
54.Sposoby przekształceń (transformacji) współrzędnych przestrzennych stosowane w fotogrametrii analitycznej.
przekształcanie rzutowe przestrzeni
przekształcanie afiniczne
przekształcanie przez obrót
przekształcanie przez podobieństwo ( przez kolejne obroty )
55.Macierz dużego obrotu a macierz małego obrotu.
Macierz obrotu A jest ortogonalna gdy:
A = 1 lub A = -1
ATA = E ( tzn. AT=A-1 )
stąd wynika, że:
1) suma kwadratów elementów w każdej kolumnie i w każdym wierszu jest równa 1
2) suma iloczynów odpowiadających sobie elementów z każdych dwóch kolumn lub z każdych dwóch wierszy jest równe 0
W przypadku, gdy kąt nachylenia i skręcenia są małe, stosujemy przybliżoną postać macierzy dużego obrotu, uzyskujemy tzw. macierz małego obrotu ( zabieg ten ułatwia prowadzenie obliczeń ze względu na linearyzację parametrów )
1 -dK dФ
dA = dK 1 -dΩ
-dФ dΩ 1
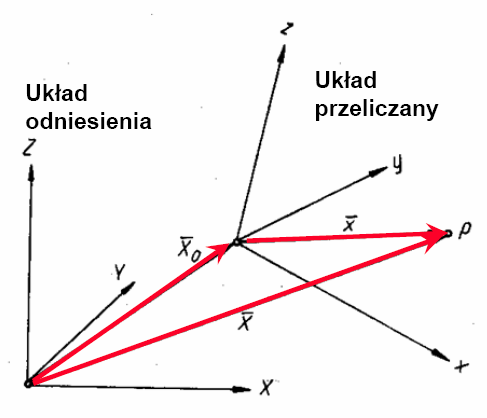
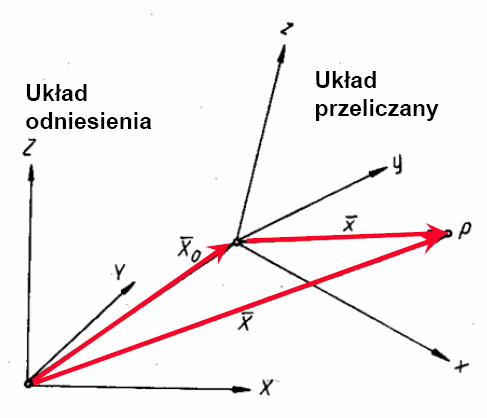
56.Przekształcenie afiniczne współrzędnych przestrzennych.
przekształcenia afiniczne:
najobszerniejsza podgrupa przekształceń rzutowych
X = (r11x + r12y +r13z) + X0
Y = (r21x + …
Z = …
X = Rx + X0 |R| nie= 0
Macierz…
Rysunek ten sam co wyżej…
12 stopni swobody
Kąty mogą ulega zmiana
Może następować zmina skali
57.Obrót układu współrzędnych przestrzennych - metoda afiniczna.
X = (r11x + r12y +r13z)
Y = (r21x + …
Z = …
X = Rx + X0 |R| nie= 0
9 stopni swobody
Kąty mogą ulec zmianom Może następować zmiana skali
58.Przekształcenie afiniczne współrzędnych przestrzennych, przy dodatkowym założeniu ortogonalności układów.
X=mx* ( a11x + a12y + a13z ) + Xo
Y=my* (a21x + a22y + a23z ) + Yo
Z=mz* ( a31x + a32y + a33z ) + Zo
X = miA * x * Xoi
9 stopni swobody
zachowana równość kątów
Zmiana skali w kierunku każdej osi może być różna
59.Przekształcenie współrzędnych przestrzennych przez podobieństwo.
X=mAxm+X0 |A|=1
X a11 a12 a13 xm X0
Y = m a21 a22 a23 ym + Y0
Z a31 a32 a33 zm Z0
X = m (a11xm + a12ym + a13zm) + X0
Y = m (a21xm + a22ym + a23zm) + Y0
Y = m (a31xm + a32ym + a33zm) + Z0
Macierz obrotu A jest ortogonalna.
Jeden wspólny współczynnik zmiany skali: mx = my = mz = mxyz = m
7 stopni swobody
Zachowana równość kątów
Zmiana skali (m) w kierunku każdej osi jednakowa
Translacja Xo
Rotacja A
Homotetia m
Przykłady zastosowania przekształcenia: zdjęcie prawie pionowe - zdjęcie pionowe
60.Obrót układu współrzędnych przestrzennych - macierz obrotu ortogonalna.
Przekształcenia przez obrót układu:
X = a11x + a12y + a13z
X = Ax |A| = 1
Macierz:
|X| = |a11 a12 a13| |x|
3 stopnie swobody A = f(omega, fi i cos tam)
Zachowana równość kątów
Zachowana skala
61.Układy współrzędnych modelu niezależnego.
62.Metody obliczeniowe stosowane w analitycznym opracowaniu stereogramu pomiarowego.
63. Etapy opracowania pojedynczego stereogramu lotniczego metodą budowy modelu niezależnego:
1)pomiar współrzędnych pkt (x`,y`,x``,y``) na zdjęciach lotniczych
2)odtworzenie, rekonstrukcja wiązek promieni rzutujących dla każdego zdj
3)wyznaczenie elementów orientacji wzajemnej zdj
4)przekształcenie zdj do położenia normalnego
5)budowa modelu niezależnego (modelu przestrzennego w układzie stereogramu) 6)wyznaczenie elementów orientacji bezwzględnej modelu
7)transformacja modelu niezależnego na układ współrzędnych terenowych
64. Etapy orientacji wzajemnej zdjęć:
1)ułożenie równań poprawek (równania paralaksy poprzecznej q): *dla kątowych elementów orientacji wzajemnej F(delta omega, fi`, fi``, kappa`, kappa``) *dla kątowo-liniowych elementów orientacji wzajemnej F(delta omega, delta fi, delta kappa, by, bz)
2)obrót wiązki rzutującej Xt=Ax A=f(omega, fi, kappa): *dla kątowych elem. orientacji wzajemnej: A`=f(omega`=0, fi`, kappa`) A``= f(omega``=delta omega, fi``, kappa``) *dla kątowo-liniowych elem. orientacji wzajemnej: A`=f(omega`=0, fi`=0, kappa`=0) A``=f(omega``=delta omega, fi``=delta fi, kappa``=delta kappa)
3)przekształcenie zdj - obliczenie współrzędnych tłowych na „nowym” zdj normalnym (wykorzystujemy kolinearność wektorów-współliniowość, warunek ten stanowi matematyczny zapis współliniowości wektorów wodzących tego samego pkt na zdj i w terenie)
4)następne iteracje (w których liczymy „nowe” x`,y`, x``,y`` i q) Proces kończymy gdy uznajemy, że wartości poprawek w kolejnych iteracjach są dostatecznie małe. W rezultacie otrzymujemy elementy orientacji wzajemnej zdj. oraz współrzędne pkt (prawego i lewego zdj) w układzie współrzędnych tłowych lewego zdj
65. Etapy orientacji bezwzględnej zdjęć:
1)Przekształcenie przez podobieństwo X=m*A*xm+X0 IAI=1
2)macierz obrotu jest macierzą ortogonalną (zachowana równość kątów)
3)jeden współczynnik zmiany skali m=mx=my=mz=mxyz (zmiana skali w kierunku każdej osi jednakowa)
4)stosuje się *translacja X0 *homotetia m *rotacja A
5)obliczenia prowadzone są metodą iteracyjną
6)dane: *wartość współczynnika skali *przybliżone wartości wektora translacji *współrzędne fotopunktu w układzie modelu niezależnego *kątowe elementy kątowe orientacji bezwzględnej *współrzędne fotopkt w układzie terenowym
7)niewiadome: *poprawka do współczynnika skali *poprawki do współrzędnych wektora translacji *poprawki do kątowych elementów orientacji bezwzględnej
8)równania poprawek dla każdego fotopkt o znanych współrzędnych X,Y,Z i xm,ym,zm
9)po każdej iteracji: *budowa macierzy dużego obrotu A *obliczane są współrzędne X,Y,Z na podstawie „nowych” wartości elementów orientacji bezwzględnej
10)transformacja afiniczna X=R*xm+X0 R różne od zera: *obliczenie przybliżonych niewiadomych do przekształcenia przez podobieństwo *kąty mogą ulec zmianie *skala może ulec zmianie *dane: X,Y,Z i xm,ym,zm *szukane: wyraz macierzy R i wektor translacji X0 Etap ten wykorzystywany jest do transformacji modelu niezależnego na układ współrzędnych terenowych
66. Etapy opracowania pojedynczego stereogramu lotniczego metodą przestrzennego wcięcia wstecz
1.A. Pomiar wsp. pkt. ( X`, Y`, X``, Y``) na zdjęciach lotniczych ( stereogramie ).
B. Odtworzenie ( rekonstrukcja )wiązek promieni rzutujących - dla każdego zdjęcia. ( pomierzone znaczki tłowe i znać el. orientacji zewnętrznej.
3. Wyznaczenie elementów orientacji zewnętrznej zdjęć
4. Przestrzenne wcięcie w przód
67.Etapy opracowania pojedynczego stereogramu pomiarowego metodą Przestrzennych Przekształceń Rzutowych.
1. Wyznaczenie 11 współczynników przekształcenia rzutowego
2. Obliczenie współrzędnych.
68.Jakie wielkości wyznaczane są w pierwszym etapie obliczeń podczas opracowania pojedynczego stereogramu lotniczego metodą przestrzennego wcięcia wstecz?
Rezultatem SA współrzędne pkt. w ukł. stereokomparatora ( monokomparatora )- w ukł. pom. instrumentu
Dodatkowy pom. znaczków tłowych pozawala na przeliczenie wsp. pkt. z ukł. pomiarowego i instrumentu na ukł. tłowy zdjęcia ( transformacja płaska )
69.Jakie wielkości wyznaczane są w pierwszym etapie obliczeń podczas opracowania pojedynczego stereogramu lotniczego metodą przestrzennych przekształceń rzutowych?
11 współczynników przekształcenia rzutowego.
70.Jakie wielkości wyznaczane są w drugim etapie obliczeń podczas opracowania pojedynczego stereogramu lotniczego metodą przestrzennego wcięcia wstecz?
poprawki do współrzędnych wektora translacji ( dXs, dYs, dZs )
poprawki do kątowych elementów orientacji zewnętrznej ( dw, dfi, dkappa )
71.Jakie wielkości wyznaczane są w drugim etapie obliczeń podczas opracowania pojedynczego stereogramu lotniczego metodą przestrzennych przekształceń rzutowych?
Współrzędne, oraz ich błędy.
72.W których metodach analitycznego opracowania zdjęć nie musimy znać elementów orientacji wewnętrznej zdjęć (geometrii zdjęć pomiarowych)?
Przestrzenne przekształcenie rzutowe ( znaczki tłowe ).
73.W których metodach analitycznego opracowania zdjęć musimy znać elementów orientacji wewnętrznej zdjęć (geometrii zdjęć pomiarowych)?
74.Wymień, jakie punkty biorą udział w budowie i rozwiązaniu sieci aerotriangulacji przestrzennej?
75.Schematy technologiczne tworzenia map (metoda uniwersalna, kombinowana).
76.Schemat technologiczny tworzenia ortofotomapy cyfrowej.
77.Plus kilka zadań z w/w zakresu, np.:
1)na ilość stref w przetwarzaniu fotomechanicznym;
2)skale modelu stereoskopowego;
3)z projektu lotu (np. długość bazy fotografowania; ilość zdjęć);
4)zniekształcenie obrazu zdjęcia lotniczego spowodowanego deniwelacją terenu lub kątem 5)nachylenia zdjęcia;
6)na obliczenie max. głębi ostrości.
7)redukcja współrzędnych z układu stereokomparatora na układ tłowy zdjęcia;
8)obliczenie współrzędnych terenowych punktów w przypadku naziemnego stereogramu normalnego wraz z dokładnością wyznaczenia tych współrzędnych;