Porównanie obrabiarek konwencjonalnych i CNC
Obrabiarki konwencjonalne |
Obrabiarki CNC |
Dane wejściowe |
|
Pracownik na podstawie zlecenia i rysunku ręcznie nastawia maszynę, zakłada i zdejmuje przedmiot obrabiany i narzędzia |
Programy obróbki mogą być wprowadzane do układu sterowania CNC z klawiatury, poprzez dyskietki, złącze bezpośrednie. Poszczególne programy mogą być gromadzone w pamięci wewnętrznej lub na twardym dysku maszyny. |
Sterowanie |
|
Sterowanie ręczne - pracownik ręcznie ustawia wszystkie parametry obróbkowe i ręcznie struje całą praca maszyny przy pomocy dźwigni, pokręteł czy przycisków. |
Sterowanie CNC - wszystkie funkcje sterownicze i regulacyjne (dane technologiczne, dane odnośnie narzędzi i ich wymiarów korekcyjnych itp.) maszyny przejmuje mikrokomputer, często umożliwiający również diagnozowanie błędów. |
Kontrola |
|
Pracownik mierzy i sprawdza ręcznie przedmiot obrabiany pod względem dokładności wymiarowo-kształtowej. |
Dzięki ciągłej informacji zwrotnej zespołu pomiarowego i zespołów napędowych z silnikami o regulowanej liczbie obrotów, obrabiarka podczas pracy zapewnia dokładność wymiarową przedmiotu obrabianego. Możliwa jest czynna kontrola przedmiotów obrabianych. |
Cechy obrabiarek CNC wpływające na ich opłacalność:
większa wydajność dzięki większej szybkości skrawania, a także krótszym czasom głównym, pomocniczym i przygotowawczo-zakończeniowym,
jednakowa jakość przedmiotów obrabianych,
niewielka ilość braków produkcyjnych,
krótsze cykle produkcyjne,
większa elastyczność produkcji.
Cechy obrabiarek CNC
Cechy współczesnych obrabiarek CNC:
oddzielny napęd (silnik, siłownik) i układ pomiarowy każdej osi sterowanej numerycznie,
bezstopniowa regulacja prędkości obrotowej i posuwów,
napęd przenoszony za pomocą śrub tocznych,
eliminowanie prowadnic ślizgowych na rzecz tocznych,
eliminowanie przekładni zębatych,
kompaktowa konstrukcja o zamkniętej przestrzeni roboczej,
konstrukcja modułowa o elastycznie dobieranej konfiguracji elementów składowych,
mała podatność statyczna i dynamiczna,
automatyczny nadzór i diagnostyka,
duża moc (jako suma mocy poszczególnych napędów),
osiąganie znacznych wartości parametrów obróbki (np. duże prędkości obrotowe),
obróbka równoległa z wykorzystaniem wielu wrzecion lub suportów narzędziowych,
złożona kinematyka pracy (uchylne głowice narzędziowe, stoły obrotowo-uchylne, obróbka pięcioosiowa, obrabiarki o strukturze równoległej),
magazyny narzędziowe z automatyczną wymianą narzędzi,
systemy narzędziowe z narzędziami składanymi,
nowoczesne materiały narzędziowe,
automatyczny pomiar narzędzi,
kodowanie narzędzi,
automatyczna wymiana przedmiotu obrabianego,
automatyczny pomiar przedmiotu obrabianego,
automatyczne usuwanie wiórów.
Sterowanie punktowe
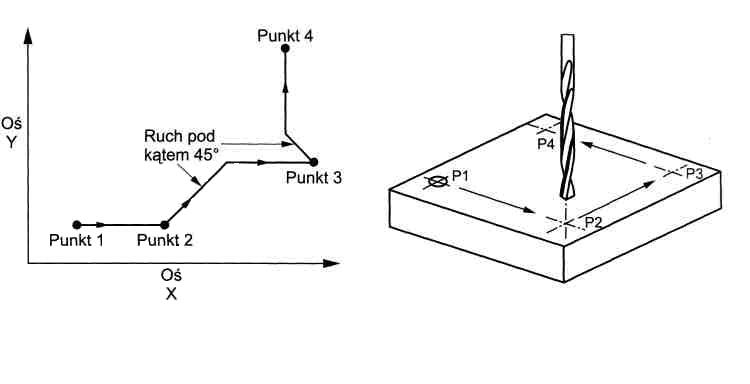
Podstawowa funkcja sterowania punktowego (rys. 3.4) jest pozycjonowanie narzędzia w ściśle określonym punkcie względem przedmiotu, przy czym nie ma znaczenia po jakim torze porusza się narzędzie. Nie jest również ważne z jaką prędkością porusza się narzędzie od jednego do drugiego punktu. Jednak ze względu na skrócenie czasu operacji oraz łatwość przewidywania bezkolizyjności przemieszczenia narzędzia wskazane jest ażeby ruch odbywał się z maksymalną prędkością i po linii prostej.
a) |
b) |
{kind=link}
Przykład sterowania punktowego( pozycjonowania ). Przemieszczenie narzędzia (a) i obróbka (b) [3].
Dla uzyskania dokładnego położenia narzędzie powinno "najeżdżać" na punkt zawsze z tej samej strony. Z tego samego powodu ostatni odcinek drogi powinien odbywać się przy zwolnionym posuwie. Układ sterownia jest najprostszy i znajduje zastosowanie do sterowania np. wiertarek, wytaczarek, przebijarek czyli maszyn gdzie istotne jest dokładne pozycjonowanie narzędzia nad osią otworu.
1 Opisać sterowanie punktowe
Sterowanie punktowe: charakteryzuje się tym, że narzędzie po wykonaniu pracy w punkcie A przedmiotu obrabianego określonym współrzędnymi x1 y1 ma być przemieszczone do punktu B określonego współrzędnymi x2 y2. Nie jest jednak istotne po jakim torze to przemieszczenie nastąpi. Sterowanie takie jest najczęściej stosowane na wiertarkach współrzędnościowych.
Lub
sterownie punktowe dotyczy zasadniczo ruchów przesuwowych i ustawicznych narzędzia względem przedmiotu. Nie obejmuje ono ruchów podstawowych -posuwowych. Sterowanie punktowe ma zapewnić ustawienie narzędzia(albo przedmiotu) w punkcie o współrzędnych zapisanych w programie. Nie jest przy tym istotne , po jakim torze porusza się z jednego punktu do drugiego. Zapis geometryczny następuje poprzez definiowanie punktów. Istotne jest przejście przez określone punkty. Stosowane w robotach, wiertarkach.
2 Różnica pomiędzy obrabiarkami konwencjonalnymi a numerycznymi
W obrabiarkach sterowanych numerycznie wszystkie ruchy zespołów są sterowane przez komputer zgodnie z danymi i instrukcjami podanymi w postaci symbolicznej. Rola operatora może sprowadzać się tylko do zdejmowania i zakładania przedmiotu do obróbki.
W obrabiarkach konwencjonalnych wszystkie operacje wykonywane są przez operatora.
3 Co to jest INTERPOLATOR
Zastosowanie interpolatora jest warunkiem koniecznym jednoczesnego sterowania kilkoma osiami napędowymi ruchu posuwowego. Oznacza to, że w obrabiarkach ze sterowaniem punktowo-odcinkowym, w danym przedziale czasu, tylko jeden napęd (jedna oś) może być sterowana numerycznie. Nie ma możliwości jednoczesnego sterowania np. dwoma napędami ruchu posuwowego, czyli nie ma możliwości wykonania stożka tzw. Posuwem skojarzonym na tokarce ze sterowaniem numerycznym odcinkowym.
Sterowanie kształtowe
Sterowanie kształtowe obejmuje wszystkie te przypadki obróbki, w których droga narzędzia względem przedmiotu obrabianego musi przechodzić przez kolejno wyznaczone punkty toru i jest ona linią składającą się zarówno z prostoliniowych, jak i krzywoliniowych odcinków (rys. 3.8). Dowolny zarys uzyskuje się dzięki współdziałaniu dwóch lub więcej silników napędów ruchów posuwowych. W czasie ruchu narzędzia pomiędzy dwoma punktami pośrednimi na zdefiniowanym matematycznie torze ruchu stosuje się interpolację (rys. 3.3).
a)
|
b)
|
Sterowanie odcinkowe
Sterowanie odcinkowe różni się od punktowego tym, że przemieszczenie narzędzia odbywa się po określonym torze i z określoną prędkością. Odcinki toru narzędzia muszą być równolegle do osi układu współrzędnych w określonej płaszczyźnie. Z tego powodu kontury przedmiotu obrabianego mogą być równoległe do osi sterowanych.
Sterowanie odcinkowe ma zastosowanie głównie do dwóch typów operacji:
planowania i toczenia wzdłużnego w obróbce wałków wielostopniowych (rys.3.5),
Przykład sterowania odcinkowego - toczenie wałka wielostopniowego [3].
frezowania zarysów prostokątnych i frezowania płasko-równoległego głowicami frezowymi oraz frezowanie odsadzeń/wybrań przelotowych frezami walcowo-czołowymi (rys.3.6a-c) [3].
Informacja wyjściowa z interpolatora, czyli wartość zadana przemieszczenia w postaci jednego lub kilku sygnałów przekazywana jest do układów automatycznej regulacji przemieszczenia zespołów roboczych obrabiarki - serwomechanizmów posuwu. Serwomechanizm posuwu zapewnia realizację przemieszczenia zespołu roboczego z określoną dokładnością.
Co to jest INTERPOLATOR
Zastosowanie interpolatora jest warunkiem koniecznym jednoczesnego sterowania kilkoma osiami napędowymi ruchu posuwowego. Oznacza to, że w obrabiarkach ze sterowaniem punktowo-odcinkowym, w danym przedziale czasu, tylko jeden napęd (jedna oś) może być sterowana numerycznie. Nie ma możliwości jednoczesnego sterowania np. dwoma napędami ruchu posuwowego, czyli nie ma możliwości wykonania stożka tzw. Posuwem skojarzonym na tokarce ze sterowaniem numerycznym odcinkowym.