1. Podstawowa zasada pomiarów GNSS (geometria)
|
- Układ współrzędnych zaczepiony jest w środku ciężkości Ziemi, jest geocentryczny - Oś x przecina południk 0° i leży w płaszczyźnie równika - Oś y jest prostopadła do osi x i leży w płaszczyźnie równika - Oś z leży na linii biegunów - Układ ten obraca się wokół własnej osi - Równocześnie cały układ obraca się wokół Słońca - Współrzędne punktu na Ziemi wyznaczany jest na podstawie przestrzennego wcięcia wstecz - Mierzona jest odległość od satelitów ( o dokładnie znanych i monitorowanych położeniach) do punktu (Ro)
|
2. Wymień i scharakteryzuj techniki pomiarowe GNSS
W zależności od celu, jakiemu wyniki pomiarów mają służyć, i wymaganej dokładności wyników, w zależności od liczby odbiorników GPS, w zależności od liczny odbiorników GPS, którymi dysponujemy, oraz ich parametrów, i wreszcie, w zależności od cech dostępnego oprogramowania komputerowego do wyznaczenia pozycji w systemie GPS powinno się wybrać jedną z procedur pomiarowych:
Pomiar statyczny - wykonując pomiary w procedurze statycznej, co najmniej dwa, a w miarę możliwości większa liczba odbiorników GPS rozmieszczonych zazwyczaj w punktach sieci geodezyjnej, gromadzi w przeciągu około jednej godziny obserwacje faz fal nośnych pewnej grupy satelitów GPS. Dla sąsiednich stacji obserwacyjnych lub stacji położonych w odległościach nieprzekraczających pojedynczych setek kilometrów są to z reguły obserwacje tych samych satelitów.
Wyniki pomiarów statycznych faz fali są najczęściej formowane w związki podwójnych różnic fazowych .
Serwis POZGEO przeznaczony jest do obliczeń w trybie postprocessingu obserwacji GPS wykonywanych metodą statyczną. Do obliczeń wykorzystywane są obserwacje fazowe z odbiorników jedno i dwuczęstotliwościowych, przekonwertowane do ustalonego formatu danych obserwacyjnych.
Dostęp do serwisu realizowany jest przez stronę internetową systemu. Po zalogowaniu się użytkownik może przesłać dane obserwacyjne za pomocą przygotowanego formularza zgłoszeń. Po przesłaniu pliku obserwacyjnego, jest on sprawdzany pod względem poprawności formatu, a następnie przekazywany do aplikacji automatycznego postprocessingu realizowanego poprzez Automatic Postprocessing Software for Trimble Application (APPS). Oprogramowanie prowadzi obliczenia bazując na podwójnych różnicach obserwacji fazowych. Dodatkową cecha oprogramowania jest korzystanie z absolutnych kalibracji dla anten GPS.
Obliczenia dla przesłanych plików obserwacyjnych wykonywane są w oparciu o 6 najbliższych stacji referencyjnych, do których wyznaczone wektory spełniają określone kryteria dokładnościowe. Na ich podstawie realizowane jest wyrównanie, którego wynikiem są współrzędne stacji w układzie ETRF2000 (ang. European Terrestrial Reference Frame). Dodatkowo współrzędne są przeliczane do układów 2000, 1992 oraz 1965. w zależności od daty wprowadzenia pliku obserwacyjnego do obliczeń używane są orbity nawigacyjne, IGS-rapid lub IGS-final.
Obliczenia w serwisie POZGEO wykonywane są dla plików obserwacyjnych spełniających poniższe kryteria:
Liczba satelitów
Obliczenia w serwisie POZGEO prowadzone są dla obserwacji statyczncyh wykonanych jednoczesnie do 4
satelitów GPS. Jest to mimimum jakie wynika z matematycznego zagadnienia wyznaczania pozycji w sytemie GPS (wyznaczenie współrzędnych XYZ oraz poprawki do czasu dla zegara odbiornika). Zalecaną liczbą satelitów dla tego serwisu powinna być większa lub równa 5.
Rozmiar pliku
Maksymalny rozmiar pliku jaki może zostać przesłany w celu wykonania obliczeń wynosi 17 MB. Aby ograniczyć rozmiar, pliki obserwacyjne można ograniczyć do obserwacji C1, P1, P2, L1, L2. Wyłącznie takie sygnały brane są do obliczeń.
Orbity nawigacyjne
Do obliczeń w serwisie wykorzystywana jest jedna z trzech dostępnych orbit: orbita transmitowana (Broadcast), IGS-Rapid oraz IGS-Final. Dokładnośc oraz dostepność tych orbit przedstawiona jest w poniższej tabeli:
Typ orbity |
Dokładność |
Dostępność |
Interwał |
Broadcast |
~100 cm |
czas rzeczywisty |
parametry orbity |
IGS-Rapid |
~2.5 cm |
17-41 godzin |
pozycja co 15 minut |
IGS-Final |
~2.5 cm |
12-18 dni |
pozycja co 15 minut |
Tabela 1. Dokładnoś oraz dostępność różnych typów orbit. Źródło: IGS Product Table
Pomimo tego, że błędy orbit są w dużym stopniu eliminowane zalecaną orbitą do obliczeń jest orbita IGS-Rapid, zdecydowanie przewyższająca dokładnością orbitę Broadcast. Będzie ona dostępna jezeli plik obserwacyjny zostanie przesłany do serwisu od 1 do 2 dni po zakończeniu pomiarów.
Okres obserwacji: Pliki obserwacyjne przesyłane do obliczeń powinny być dłuższe niż 15 minut i krótsze niż 24 godziny. Przy czym musza spełniać dodatkowe warunki odnośnie ilości zarejestrowanych epok pomiarowych. Ponieważ POZGEO jest serwisem automatycznym, zaleca się aby pliki obserwacyjne przesłane do obliczeń POZGEO zawierały przynajmniej 40 minut 1-sekundowych dwuczęstotliwościowych obserwacji fazowych GPS. W przeciwnym wypadku nie może być zagwarantowana dokładność obliczeń. Do czasu obserwacji wlicza się wyłącznie obserwacje do satelitów znajdujących się powyżej 10 stopni nad horyzontem.
Minimalna liczba epok dla których wykonywane są obliczenia to 720 (np. 15 minut obserwacji z interwałem 1 sekundy). Pliki obserwacyjne nie spełniające tego warunku są automatycznie odrzucane.
Maksymalna liczba wykorzystywanych epok: 3600 (np. 1 h obserwacji z interwałem 1 sekundy). w przypadku przekroczenia tej wartości, obserwacje są rozrzedzane do mniejszego interwału będącego wielokrotnością formatu podstawowego (np. z interwału 5 sekund do 10 sekund).
Pomiary RTK / DGPS Ze względu na dokładność oraz stosowaną technologię, pomiary różnicowe w czasie rzeczywistym dzielimy na pomiary RTK (ang. Real-Time Kinematic) oraz pomiary DGPS (ang. Differential GPS).
Pomiary RTK - serwis NAWGEO Termin RTK odnosi się do metody fazowych pomiarów satelitarnych, w których pozycja wyznaczona przez odbiornik mobilny poprawiana jest w czasie rzeczywistym z wykorzystaniem danych obserwacyjnych wysyłanych ze stacji bazowej.
Obserwacje wykonywane przez odbiornik GNSS ze względu na błędy pomiarowe spowodowane głównie wpływem atmosfery ziemskiej, mają ograniczoną dokładność. Błędy te mogą być wyznaczone gdy odbiornik wykonujący pomiary zostanie ustawiony na punkcie o znanych współrzędnych. Poprzez porównanie odległości mierzonej (od satelity nawigacyjnego do odbiornika GNSS) z odległością teoretyczną, wyliczoną na podstawie parametrów orbity satelity nawigacyjnego oraz współrzędnych punktu pomiarowego odbiornik jest w stanie wyliczyć korekty do mierzonych odległości oraz zmiany współrzędnych. Odbiornik wykonujący obserwacje w celu wyliczenia korekt pomiarowych oraz mający możliwość wysłania tych informacji np. drogą radiową (UHF) lub GSM (GPRS) nazywamy odbiornikiem bazowym lub stacją referencyjna. Błędy pomiarowe towarzyszące pomiarom satelitarnym charakteryzują się tym, że na pewnym obszarze ich zmienność jest na tyle mała że nie ma znaczącego wpływu na dokładność pomiaru. W związku z powyższym przy pomiarach różnicowych mogą być wyeliminowane. Odbiornik mobilny wykonujący pomiary w terenie oraz odbierający poprawki do obserwacji GNSS (korekty) jest w stanie poprawić dokładność swoich wyznaczeń do poziomu pojedynczych centymetrów. Do błędów eliminowanych podczas pomiarów różnicowych (w tym RTK) zaliczamy: 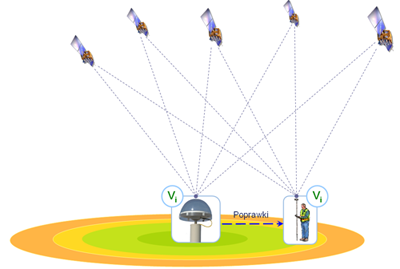
Błąd zegara satelity i odbiornika
Błędy orbit satelitów
Opóźnienie jonosferyczne
Opóźnienie troposferyczne
W technice RTK, poza kodowymi obserwacjami sygnału satelitarnego, wykorzystywane są obserwacje fazowe. Odbiornik rejestruje dla każdego z sygnałów końcówkę (fazę) fali nośnej oraz zmianę liczby odłożeń pełnej długości fali (pełnych cykli fazowych) od momentu rozpoczęcia śledzenia satelity przez odbiornik (ΔNi). W procesie wyznaczania współrzędnych (inicjalizacji odbiornika) istnieje potrzeba wyznaczenia tzw. nieoznaczoności fazy N0, tj. nieznanej, przypadkowej początkowej liczby pełnych cykli fazowych sygnału GNSS, stałej dla nieprzerwanych pomiarów do danego satelity. Ze względu na dodatkową niewiadomą N0i w procesie wyznaczania współrzędnych, do pomiarów w trybie RTK niezbędne jest ciągłe obserwowanie 5 satelitów nawigacyjnych. Otrzymanie przez odbiornik danych ze stacji referencyjnej, poprzez minimalizację błędów pomiarowych, znacznie przyspiesza proces inicjalizacji.
Wysoka dokładność uzyskiwana w tej metodzie opiera się na wykorzystaniu do pomiaru odbiorników dwuczęstotliwościowych (L1 i L2) rejestrujących fazy nośne sygnałów satelitów nawigacyjnych. Długości fal L1 i L2 wynoszą odpowiednio około 19 i 24 cm. Wysokiej klasy sprzęt pomiarowy potrafi wyznaczyć fazę sygnału z dokładnością 1% długości obserwowanej fali. Aktualnie na rynku pojawiają się również pierwsze odbiorniki do pomiarów RTK wykonujące pomiary na jednej częstotliwości (L1).
Na ostateczną dokładność uzyskiwanych współrzędnych duży wpływ ma otoczenie, w którym wykonywane są pomiary. Płaskie powierzchnie jak ściany budynków, duże zbiorniki wodne, parkingi samochodowe oraz linie wysokiego napięcia oraz szczątkowe błędy atmosferyczne powodują zmniejszenie dokładności pomiarów. Dodatkowym elementem ograniczającym dokładność jest także odległość od stacji referencyjnej - rozwiązaniem tego problemu okazały się poprawki powierzchniowe.
Poprawki powierzchniowe Pomiary wykonywane w oparciu o pojedynczą stację referencyjną ograniczone są ze względu na odległość pomiędzy odbiornikiem mobilnym a stacją bazową. Błąd wyznaczenia pozycji rośnie wraz z odległością. Przyjmuje się że dla odległości do 5 km można wykonywać pomiary bez znacznej utraty dokładności. Dodatkowymi ograniczeniami pomiarów RTK jest także potrzeba posiadania drugiego odbiornika (ustawianego na punkcie o znanych współrzędnych) oraz radiomodemu lub modemu GSM (GPRS) do transmisji poprawek.
Aby zwiększyć obszar w którym mogą być wykonywane pomiary RTK, pojedyncze stacje referencyjne łączone są w sieć, która jest zarządzana przez centrum obliczeniowe. W systemie ASG-EUPOS średnie odległości pomiędzy stacjami referencyjnymi wynoszą obecnie ok. 70 km. Gromadzone na nich dane obserwacyjne transmitowane są do centrum obliczeniowego, gdzie następuje wyliczenie korekt obserwacyjnych. Poprawki wyliczane w oparciu o grupę stacji rozłożonych na pewnym obszarze, nazywamy poprawkami powierzchniowymi lub sieciowymi.
W przypadku serwisu NAWGEO w ręce użytkownika oddane są następujące rodzaje poprawek powierzchniowych:
MAC (Net) ang. Master and Auxiliary Concept
VRS ang. Virtual Reference Station
FKP niem. Flächenkorrekeurparameter
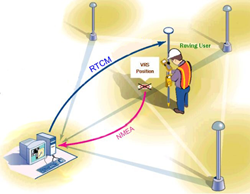
Aby skorzystać z wybranego rodzaju poprawki, użytkownik powinien podłączyć się do systemu i wybrać odpowiedni punkt podmontowania tzw. mountpoint. W momencie połączenia odbiornik użytkownika wysyła do centrum obliczeniowego depeszę NMEA GGA (ang. The National Marine Electronics Association) zawierającą informację o swojej przybliżonej pozycji. Informacja ta jest niezbędna, aby określić stacje referencyjne znajdujące się w jego otoczeniu. W odpowiedzi użytkownik otrzymuje dane korekcyjne zapisane w formacie RTCM (ang. Radio Technical Commision For Marine Services). Dane korekcyjne interpolowane dla użytkownika mają „ważność” dla obszaru o promieniu 5 km względem podanych współrzędnych przybliżonych.
Poniżej znajdują się interpretacje graficzne prezentujące zasadę działania poszczególnych rodzajów poprawek serwisu NAWGEO:
MAC (Net) W przypadku poprawki MAC, po wysłaniu depeszy NMEA, do użytkownika docierają obserwacje z głównej stacji bazowej oraz ich różnice wyznaczone na podstawie obserwacji z otaczających stacji referencyjnych. Obliczenia częściowo wykonywane są przez centrum obliczeniowe (poprawki z głównej stacji ref. i pochodne ze stacji sąsiednich), natomiast interpolacja poprawki do przybliżonej pozycji odbiornika mobilnego wyznaczana jest przez oprogramowanie zainstalowane w sprzęcie pomiarowym użytkownika.
VRS W przypadku VRS, oprogramowanie w odbiorniku współpracuje z centrum obliczeniowym, tak jakby pobierało dane z pojedynczej stacji referencyjnej, nazywanej wirtualną stacją referencyjną. Wartości korekt obserwacyjnych, wyliczane są w centrum obliczeniowym, poprzez interpolację poprawek z otaczających stacji referencyjnych, do przybliżonej pozycji odbiornika, przesłanej w depeszy NMEA GGA. 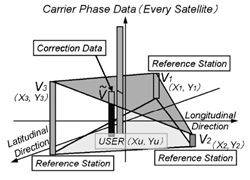
FKP W przypadku poprawki FKP do odbiornika przesyłane są współczynniki równań powierzchni opisujące zmienność poprawki dla danego satelity nawigacyjnego w ograniczonym obszarze. Rolą oprogramowania w odbiorniku jest odebranie współczynników równania i wprowadzenie jako niewiadomych współrzędnych przybliżonych. W rezultacie dla wszystkich satelitów nawigacyjnych określane są wartości danych korekcyjnych. Oprogramowanie w centrum obliczeniowym odpowiedzialne jest za przygotowanie współczynników opisujących zmienność poszczególnych poprawek w obszarze wyznaczonym przez wybrane stacje referencyjne.
Pomiary DGPS - serwisy KODGIS i NAWGIS
Termin DGPS odnosi się do metody różnicowych pomiarów satelitarnych GPS. W przypadku prac wykonywanych w czasie rzeczywistym terminu tego używa się w odniesieniu do kodowych pomiarów satelitarnych, w których wyznaczona pozycja, tak jak w pomiarach RTK poprawiana jest na bieżąco o dane korekcyjne.
W odróżnieniu od RTK, DGPS jest prostszą techniką wyznaczania współrzędnych, bazującą przede wszystkim na pomiarach kodowych tzn. nie istnieje potrzeba wyznaczenia nieoznaczoności (procesu inicjalizacji). Do określenia współrzędnych wystarczają już 4 satelity nawigacyjne. Dokładności uzyskiwane tą techniką zależą głównie od odległości od stacji bazowej.
Pomiary kodowe znajdują zastosowanie przede wszystkim w nawigacji, turystyce oraz gromadzeniu danych dla systemów GIS.
3. Wymień układy współrzędnych obowiązujące w Polsce realizowane technikami satelitarnymi
Model Ziemi:
Powierzchnia ziemi geoidaelipsoida obrotowasfera
Sfera i jej odwzorowania:
-odwzorowanie azymutalne
-odwzorowanie stożkowe
-odwzorowanie walcowe
System odniesienia-stanowi zbiór ustaleń i zaleceń wraz z opisem modeli do zdefiniowania początku, skali (metryki) i orientacji osi oraz zmienności tych parametrów w czasie
Układ odniesienia-stanowi praktyczną realizację systemu odniesienia. Na układ odniesienia składają się wyznaczone z obserwacji wartości parametrów opisujących początek układu, skalę i orientację osi oraz ich zmienność w czasie.
Statyczny-zdefiniowany przez zbiór współrzędnych punktów
Kinematyczny-zdefiniowany przez współrzędne punktów realizujących systemy odniesienia oraz zmiany w czasie współrzędnych tych punktów (prędkości)
Układ współrzędnych- określa jednoznacznie sposób porządkowania położenia punktu względem układu odniesienia-zbioru wartości liczbowych
ITRS- Międzynarodowy Ziemski System Odniesienia, został zdefiniowane przez przestrzenny obrót względem nie obracającego się systemu geocentrycznego ICRS (Międzynarodowy Niebieski System Odniesienia)), przy zachowaniu następujących warunków:
-jest układem geocentrycznym o początku w centrum mas Ziemi
-jednostką długości jest metr
-orientacja ITRS jest zgodna z orientacją Międzynarodowego Biura Czasu
-zmienność orientacji w czasie jest określona poprzez zastosowanie warunku, iż globalna suma poziomych ruchów tektonicznych nie zawiera składowych obrotu
ITRS jest pierwszym systemem kinematycznym.
ITRF- Międzynarodowy Ziemski Układ Odniesienia. Jest praktyczną realizacją ITRS. Poszczególne rozwiązania ITRF (ITRF88, ITRF89, ..., TRF96, ITRF97, ITRF2000 i ITRF2005) są opracowywane przez ośrodki obliczeniowe IERS w oparciu o obserwacje VLBI, LLR, SLR, GPS i DORIS. Każde kolejne rozwiązanie ITRF zawiera pozycje i prędkości stacji obserwacyjnych oraz pełną macierz kowariancji. Rozwój sieci ITRF w okresie ostatnich kilkunastu lat (5-krotny wzrost liczby stacji obserwacyjnych i poprawa ich przestrzennego rozkładu) oraz poprawa precyzji wyznaczenia pozycji i prędkości stacji dzięki zwiększaniu materiału obserwacyjnego i ulepszaniu strategii i metod opracowania obserwacji powodują znaczącą poprawę w kolejnych rozwiązaniach ITRF. Parametry transformacji pomiędzy układami ITRF są wyznaczane przez IERS i publikowane w IERS Conventions.
ETRS- Europejski Ziemski System Odniesienia, podzbiór ITRS. Dla zapewnienia zgodności z systemem ITRS do jego zdefiniowania wykorzystano sieć europejskich stacji SLR (8stacji) i VLBI (7stacji), które brały udział w rozwiązaniu układu ITRF89
ETRF (European Terrestrial Reference Frame) - europejski przestrzenny układ odniesienia utworzony w ramach ITRF (International Terrestrial Reference Frame).
Jest on obecnie w większości krajów europejskich - w tym również w Polsce - państwowym geodezyjnym przestrzennym układem odniesienia stosowanym w pracach geodezyjnych oraz w systemach informacji o terenie. ETRF stanowi 35 stacji (punktów) bazowych, którym na drodze procesów pomiarowych nadaje się współrzędne elipsoidalne (geodezyjne).
EUREF -Realizacja układu ETRF
Z inicjatywy EUREF pierwszą, dużą kampanię obserwacyjną obejmującą Europę Zachodnią wykonano w 1989 roku. Pozwoliło to zdefiniować nowy układ odniesienia i stworzyć podstawy do dalszego rozwoju tego układu, zwanego od tej pory EUREF. Przyjęto koncepcję układu związanego z płytą tektoniczną, którego stabilność może być naruszana tylko przez deformacje samej płyty.
Geodezyjny układ odniesienia, zwany dalej "EUREF-89", jest rozszerzeniem europejskiego układu odniesienia ETRF na obszar Polski, w wyniku kampanii pomiarowej EUREF-POL 92, której rezultaty zostały zatwierdzone przez Podkomisję dla Europejskiego Układu Odniesienia (EUREF) Międzynarodowej Asocjacji Geodezji w 1994 r. W EUREF-89 stosuje się Geodezyjny System Odniesienia 1980 (GRS 80), przyjęty na XVII Zgromadzeniu Generalnym Międzynarodowej Unii Geodezji i Geofizyki (MUGG) w Canberze, w grudniu 1979 r.
Konsekwentne działania polegające na założeniu w 1992 roku sieci 11-tu punktów zerowego rzędu EUREF-POL, która otrzymała akceptację Podkomisji EUREF w 1994 roku, jako sieci spełniającej określone przez Komisję standardy dokładności i następujące po tym dogęszczenie tej siecią 348 punktów POLREF umożliwiły przejście na nowy geodezyjny układ odniesienia EUREF-89 (współrzędne trójwymiarowe BLh).
W układzie EUREF-89 mamy już, poza założonymi sieciami: EUREF-POL i jej dogęszczeniem POLREF (11+348 punktów), wyrównaną ponownie sieć klasy I, wyznaczoną metodami klasycznymi (nie satelitarnymi). Zakończono też całkowicie prace nad wyznaczeniem współrzędnych punktów osnowy szczegółowej II klasy, która podobnie jak klasyczna osnowa podstawowa, została ponownie wyrównana w skali całego kraju, łącznie z obszarem GOP i ROW - ten obszar wymagał osobnego potraktowania. Z uwagi na to, że wyrównania tych sieci realizowane były w układzie płaskim 1992 współrzędne w układzie EUREF-89 to współrzędne: B iL.
UKŁAD WYSOKOŚCI Układ wysokości tworzą wartości geopotencjalne podzielone przez przeciętne wartości przyspieszenia normalnego siły ciężkości, zwane dalej "wysokościami normalnymi", odniesione do średniego poziomu Morza Bałtyckiego w Zatoce Fińskiej, wyznaczonego dla mareografu w Kronsztadzie koło Sankt Petersburga (Federacja Rosyjska).
• Wysokości normalne określa się z pomiarów geodezyjnych nawiązanych do punktów podstawowej osnowy geodezyjnej kraju.
UKŁAD WSPÓŁRZĘDNYCH PŁASKICH PROSTOKĄTNYCH "2000"
4.1.1 Układ współrzędnych płaskich prostokątnych "2000" jest utworzony na podstawie matematycznie jednoznacznego przyporządkowania punktów powierzchni Ziemi odpowiednim punktom na płaszczyźnie według teorii odwzorowania kartograficznego Gaussa-Krügera.
4.1.2 Obszar kraju dzieli się na cztery pasy południkowe o szerokości 3° długości geograficznej każdy i o południkach osiowych: 15°, 18°, 21° i 24° długości geograficznej wschodniej, ponumerowane odpowiednio numerami: 5, 6, 7 i 8. Podział obszaru kraju na pasy odwzorowania układu "2000" przedstawia rysunek.
4.1.3 Współczynnik zmiany skali w południku osiowym każdego pasa południkowego równa się 0.999923.
4.1.4 Punkt przecięcia się obrazu równika z obrazem południka osiowego otrzymuje współrzędną x= 0, a punkty leżące na południku osiowym współrzędną y= 500.000 m. W celu jednoznacznego określenia położenia punktu przed współrzędną y podaje się numer pasa południkowego, co dla przykładu punktów leżących na południku osiowym oznacza:
• 5.500.000 m przy południku Lo = 15°
• 6.500.000 m przy południku Lo = 18°
• 7.500.000 m przy południku Lo = 21°
• 8.500.000 m przy południku Lo = 24°.
UKŁAD WSPÓŁRZĘDNYCH PŁASKICH PROSTOKĄTNYCH "1992"
4.2.1 Układ współrzędnych płaskich prostokątnych "1992" jest utworzony na podstawie matematycznie jednoznacznego przyporządkowania punktów powierzchni Ziemi odpowiednim punktom na płaszczyźnie według teorii odwzorowania kartograficznego Gaussa-Krügera.
4.2.2 Układ "1992" określają następujące parametry:
• południk osiowy L = 19° długości geograficznej wschodniej,
• pas południkowy o szerokości obejmującej cały obszar kraju,
• współczynnik zmiany skali 0.9993 w południku osiowym,
• punkt przecięcia się obrazu równika z obrazem południka osiowego otrzymuje współrzędną x = -5.300.000m, a punkty leżące na południku osiowym współrzędną y = 500.000 m.
ASG-EUPOS Przeniesienie na obszar Polski geodezyjnego systemu odniesienia ETRS89 odbywa się poprzez sieć stacji referencyjnych systemu ASG-EUPOS i punktów podstawowej osnowy geodezyjnej EUREF-POL i POLREF za pośrednictwem obserwacji satelitarnych GNSS.
4. Omów warunki zakładania osnów pomiarowych technikami GNSS.
Do zakładania osnowy pomiarowej techniką GNSS wykorzystuje się:
- metodę pomiarów statycznych i szybkich statycznych, w nawiązaniu do najbliższych stacji systemu ASG-EUPOS, przy wykorzystaniu serwisu POZGEO D albo do lokalnej stacji referencyjnej spełniającej warunki punktu nawiązania geodezyjnego
- metodę pomiarów RTK GNSS przy wykorzystaniu serwisu NAWGEO systemu ASG-EUPOS albo w nawiązaniu do lokalnej stacji referencyjnej spełniającej warunki punktu nawiązania geodezyjnego, położonej w odległości nie większej niż 5km.
Przy czym w obydwu przypadkach wymagane jest wykonanie pomiarów kontrolnych na punktach osnowy geodezyjnej wyższej klasy.
Procedury przygotowania sprzętu
Prace związanie z przygotowaniem sprzętu do pomiarów sytuacyjnych i wysokościowych z zastosowaniem technologii GNSS
a) Pomiary sytuacyjne i wysokościowe, w tym zakładania pomiarowej, poziomej osnowy geodezyjnej i pomiarowej osnowy wysokościowej, realizowane z zastosowaniem technologii GNSS wykonuje się satelitarnymi, jednoczęstotliwościowymi lub wieloczęstotliwościowymi odbiornikami GNSS, przy czym:
1) wymaga się aby odbiorniki miały zapewnioną przez producenta wewnętrzną dokładność;
2) parametry pracy odbiornika należy dostosować do danego typu odbiornika, metody pomiaru i metody opracowania
3) anteny satelitarne winny mieć wyznaczony model zmian centrum fazowego, zaleca się model absolutny publikowany przez EPN/IGS oraz być zabezpieczone przed wpływem odbić sygnałów satelitarnych
b) System ciągłego sprawdzania zapewnia wysoką niezawodność. W trakcie pomiaru wykonuje się obsługę codzienną i czynności sprawdzające zalecane w instrukcji obsługi
Dopuszcza się wykorzystanie serwisu POZGEO do wyznaczenia współrzędnych punktów geodezyjnej osnowy pomiarowej, przy czym współrzędne powinny być obliczone w serwisie POZGEO ze zbirów obserwacyjnych o długości co najmniej 40 min dla odbiorników L1/L2.
Zalecenia ASG-EUPOS
Wykonywanie pomiarów RTK
W przypadku pomiarów punktów poziomej i wysokościowej pomiarowej osnowy geodezyjnej (…) powinny być sprawdzone za pomocą drugiego, niezależnego pomiaru wykonanego metodą RTK, metoda statyczną lub metoda klasyczną (poligonową lub metodą wcięć). Do dalszych opracowań przyjmuje się wartość średnią.
Minimalne warunki RTK:
a) odbiornik powinien pracować w trybie precyzyjnym RTK,
b) odbiornik powinien wyznaczać pozycję w oparciu o minimum 5 satelitów GNSS
c) odbiornik powinien wyznaczać pozycję w oparciu o satelity znajdujące się powyżej 10° nad horyzontem
d) odbiornik powinien wyznaczać pozycję przy wartości współ. PDOP <6.0
Punkty osnowy pomiarowej sytuacyjnej i wysokościowej (…) należy mierzyć co najmniej odbiornikami L1/L2 przy następujących warunkach dodatkowych:
a) odbiornik powinien wyznaczać pozycję w oparciu o minimum 6 satelitów GNSS
b) odbiornik powinien uwzględniać poprawki sieciowe lub poprawki ze stacji referencyjnej oddalonej nie więcej niż 5km
c) parametr PDOP powinien być mniejszy lub równy 3
d) odchylenie standardowe pozycji dla składowej poziomej powinno być mniejsze lub równe +-0,02m
e) dla interwału zapisu pozycji co 1s. czas trwania pomiaru powinien wynosić co najmniej 30 sekund
f) w przypadku umieszczenia anteny GNSS na tyczce zaleca się wykorzystanie podpórek do tyczki na czas wykonywania pomiaru
5. Do czego służy i co zawiera standard RTCM?
(Radio Technical Commission for Maritime Services) nazwa organizacji oraz standard transmisji poprawek różnicowych systemu GPS dla pomiarów DGPS/RTK, nazwa pełna to RTCM SC-104 (SC-104 odnosi się do powołanej specjalnej komisji (Special Comittet) o numerze 104). Poprawki RTCM wysyłane ze stacji referencyjnej do odbiornika RTCM są przekazywane w czasie rzeczywistym z wykorzystaniem kodu C/A.
RTCM w wersjach:
2.0 ( typ depeszy 1-4) - poprawki DGPS
2.1 (typ 18-21) - GPS
2.2 (typ 23-24) - +GLONASS
2.3 (typ 31-36) - + depesze dotyczące anteny
3.0 - +szybkość transmisji, dane o FKP i VRS
3.1 - + parametry do transmisji do określonego układu współrzędnych
Zawartość standardu:
- dane przesyłane w kolejnych depeszach przesyłanych z różną prędkością
- depesze mogą być transmitowane drogą radiową lub internetową
- każda depesza składa się z :
header - nagłówek (typ depeszy, czas, długość depeszy)
body - depesza binarna (dane dla każdego typu danych)
Format RTCM SC-104 zawiera 63 typy wiadomości (ważniejsze):
Typ 1 - poprawki różnicowe GPS
Typ 2 - poprawki delta-różnicowe
Typ 3 - parametry stacji referencyjnej
Typ 4 - parametry geodezyjne
Typ 5 - status konstelacji satelitów
Typ 10 - poprawki różnicowe dla kodu P
Typ 11 - poprawki różnicowe dla kodu C/A L2
Typ 13 - parametry przekaźnika naziemnego
Typ 15 - wiadomość jonosferyczna (troposferyczna)
Typ 18-21 - wiadomości RTK
Typ 23 - typ anteny
Typ 24 - punkt odniesienia anteny (ARP)
Typ 31-36 - wiadomości o GLONASS
6. Wymień różnice pomiędzy standardem RTCM2 a RTCM3
Standard RTCM 2 |
Standard RTCM 3 |
-szybkość 5 kbit/s -zapewnia poprawki do współrzędnych - działa tylko na odległość 50 km (ograniczony obszar działania) -potrzeba niewielkiej ilości danych -korekty obserwacji - zapis od 1 |
- szybkość 2 kbit/s - obsługuje sygnał L2C i L5 - potrzebuje transferu danych z systemu GLONASS i GALILEO - zapis od 1000
|
7.Opisz rolę powierzchniowych systemów GNSS w realizacji układu odniesienia.
Układ odniesienia w rozumieniu zbioru punktów powiązanych z Ziemią, jest obiektem dynamicznym, poddanym permanentnym obserwacjom. Stanom quasi-statycznym (epokowym) sieci stacji ITRF / ETRF przypisuje się indeks epoki obserwacyjnej. Celem ujednolicenia pomiarów geodezyjnych, obserwacje aktualne, dotyczące wyznaczeń położeń punktów, redukuje się do umownego stanu początkowego. w Polsce, obowiązuje redukcja pomiarów poziomych do epoki 1989,0 (ETRF'89). Państwowe osnowy geodezyjne, poziome i trójwymiarowe (EUREF-POL + POLREF) są dowiązane do punktów sieci europejskiej w układzie ETRF'89.
Systemy powierzchniowe:
1 - postprocessing
Pomiary statyczne o dokładności mm-cm
Pomiar statyczny służy do przestrzennego określenia punktu w oparciu o zarejestrowane w określonym okresie czasu w pamięci odbiornika dane obserwacyjne z systemu GNSS oraz obliczenia współrzędnych i wysokości punktów w trybie post-process.
2 - RTN
Pomiary RTK i DGNSS o dokładności cm-dm-m
Pomiar czasu rzeczywistego również służy do przestrzennego określenia punktu z tą różnicą, że współrzędne określane są w oparciu o poprawki przesyłane w czasie rzeczywistym.
Pytanie opracowane na podstawie prezentacji.
8. Omów koncepcje i warunki prawne działania systemu ASG EUPOS w Polsce? (Co to jest za rodzaj i na mocy jakich przepisów).
Warunki prawne to:
Projekt nowelizacji rozporządzenia Rady Ministrów z dnia 8 sierpnia 2000 r. w sprawie państwowego systemu odniesień przestrzennych (Dz. U. Nr 70, poz. 821)
WYTYCZNE TECHNICZNE G-1.12 Pomiary satelitarne oparte na systemie precyzyjnego pozycjonowania ASGEUPOS
Ustawa z dnia 17 maja 1989 r. „Prawo geodezyjne i kartograficzne”, Dz. U. z 2000 r. nr
100, poz. 1086, z późniejszymi zmianami)
Wytyczne Techniczne G-4.1: 2007 "Pomiary sytuacyjne i wysokościowe metodami
bezpośrednimi", Główny Geodeta Kraju, GUGiK, Warszawa, 2007.
Instrukcja Techniczna O-3/O-4 „Prowadzenie państwowego zasobu geodezyjnego i
kartograficznego oraz kompletowanie dokumentacji prac geodezyjnych i kartograficznych”,
Główny Geodeta Kraju, GUGiK, Warszawa 2001
Rola i miejsce systemu ASG-EUPOS
Koncepcja założenia europejskiej sieci stacji referencyjnych EUPOS - (European Position Determination System).Wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji to system wielofunkcyjnych stacji, służących do wyznaczania pozycji punktów geodezyjnych i nawigacji obiektów ruchomych, poruszających się na lądzie, morzu i w powietrzu. W Polsce jest nawiązaniem do aktywnych punktów osnowy I klasy. Punkty odniesienia stacji referencyjnych systemu ASG-EUPOS stanowią osnowę geodezyjną (w rozumieniu przepisów ustawy z dnia 17 maja 1989 r. Prawo geodezyjne i kartograficzne, Dz. U. z 2000 r. nr 100, poz. 1086 z poźn. zm.). Jest to sieć naziemnych stacji referencyjnych ASG-EUPOS wraz z punktami sieci EUREF-POL i POLREF, jako osnowa podstawowa. Realizuje stabilny i jednolity układ odniesienia na obszarze Polski system ASG-EUPOS stanowi część środkowo-europejskiego systemu precyzyjnego pozycjonowania EUPOS i jest w pełni zgodny z jego standardem.
9. Omów zastosowanie serwisów czasu rzeczywistego
Serwisy czasu rzeczywistego opierają się o zasadę pomiarów różnicowych DGNSS (ang. Differential GNSS) oraz RTK (ang. Real-Time Kinematic) wykonywanych w oparciu o stacje referencyjne. Odbiorniki wykonujące pomiary w terenie komunikują się z Centrum Obliczeniowym, w celu uzyskania korekt obserwacyjnych do pomiarów GNSS. Cały proces wymiany danych odbywa się w czasie rzeczywistym poprzez wykorzystanie połączenia internetowego GPRS, w związku z czym użytkownik otrzymuje wyniki bezpośrednio w terenie.
W zależności od metody pomiarów (DGPS/RTK) oraz rodzaju sprzętu pomiarowego (L1 lub L1/L2) dokładności uzyskiwane w pomiarach wahają się od 3 m do 3 cm. Serwisy NAWGIS i KODGIS znajdują zastosowanie głównie w pomiarach GIS oraz nawigacji. Serwis NAWGEO jest najdokładniejszym serwisem wykorzystywanym w szerokim spektrum prac geodezyjnych. W ramach NAWGEO użytkownik ma do wyboru obecnie funkcjonujące formaty poprawek tj. MAC (ang. Master and Auxiliary Concept) i VRS (ang. Virtual Reference Station).
NAWGEO - serwis wykorzystywany przy pomiarze RTK (Real Time Kinematic), czyli techniką różnicowych pomiarów satelitarnych polegającą na wyznaczeniu pseudoodległości do satelitów GNSS z pomiarów fazowych, w której współrzędne są na bieżąco korygowane za pomocą poprawek RTK. Umożliwia wyznaczenie pozycji poziomej z błędem średnim nie przekraczającym
0,03m i wysokości
0,05m przy wykorzystaniu odbiornika L1/L2KODGIS, NAWGIS - serwisy wykorzystywane przy pomiarze DGNSS, czyli techniką różnicowych pomiarów satelitarnych opartą na pomiarach kodowych pseudoodległości do satelitów GNSS, w której wyznaczane współrzędne są korygowane za pomocą poprawek DGNSS
NAWGEO to podstawowy serwis systemu ASG-EUPOS udostępniający poprawki do pomiarów w czasie rzeczywistym RTK. Umożliwia uzyskiwanie najwyższych dokładności zarówno w pomiarach kinematycznych, jak i określaniu położenia obiektów statycznych. Dzięki wielu dostępnym formatom poprawek, serwis NAWGEO pozwala użytkownikowi wykorzystać szeroką gamę sprzętu pomiarowego dostępnego na rynku. Ze względu na możliwą do uzyskania wysoką dokładność pomiarów, serwis NAWGEO dedykowany jest przede wszystkim pomiarom geodezyjnym. W przypadku pomiarów punktów poziomej i wysokościowej pomiarowej osnowy geodezyjnej, pomiarów szczegółów sytuacyjnych będących przedmiotem ewidencji gruntów i budynków oraz punktów wykorzystywanych jako punkty dostosowania w transformacji otrzymane współrzędne powinny być sprawdzone za pomocą drugiego, niezależnego pomiaru wykonanego metodą RTK z wykorzystaniem odbiorników co najmniej L1/L2, statyczną lub klasyczną. Można też mierzyć szczegóły sytuacyjne należące do I, II i III grupy dokładnościowej.
Najwyższe dokładności w pomiarach satelitarnych w czasie rzeczywistym można uzyskać wykorzystując dostępne w serwisie NAWGEO sieciowe poprawki RTK (ang. Real-Time Kinematics). Ich przewaga nad poprawkami z pojedynczej stacji referencyjnej wynika z możliwości lepszego modelowania systematycznych błędów związanych m.in. z pracą zegarów atomowych na satelitach oraz opóźnień związanych z propagacją sygnału w atmosferze. Co za tym idzie, wykorzystanie sieciowych poprawek RTK umożliwia powtarzalność wyznaczeń współrzędnych bez względu na odległość odbiornika od fizycznej stacji referencyjnej. Należy pamiętać, że przy wykorzystaniu poprawek z pojedynczej stacji referencyjnej błąd wyznaczenia współrzędnych wzrasta wraz ze wzrostem odległości od stacji, z której pochodzą poprawki. Dlatego zalecane jest stosowanie poprawek sieciowych w pomiarach RTK wszędzie tam gdzie jest to tylko możliwe.
W serwisie NAWGEO, poza rozwiązaniami sieciowymi, dostępne są także tradycyjne poprawki RTK z pojedynczej, wybranej przez użytkownika stacji referencyjnej. Nie wymaga to od użytkownika przesłania danych o jego pozycji i jest stosowane w starszych typach odbiorników GNSS. Poprawki z pojedynczych stacji referencyjnych dostępne są w systemie ASG-EUPOS wyłącznie dla stacji położonych na terenie kraju.
Istnieje duża grupa użytkowników, dla których wysoka dokładność metod RTK jest zbyteczna, natomiast dokładność pozycji autonomicznej jest zbyt niska. System ASG-EUPOS pozwala na uzyskanie podwyższonej dokładności pomiarów w trybie różnicowym DGNSS przy zastosowanie odbiorników jednoczęstotliwościowych.
Serwisy KODGIS i NAWGIS, zbliżone do siebie pod względem sposobu działania, przeznaczone są do mniej dokładnych wyznaczeń współrzędnych przy użyciu tańszych, kodowych odbiorników GNSS. Standardowy format RTCM zastosowany w serwisie KODGIS jest rozpoznawany przez wszystkie odbiorniki wyposażone w funkcję DGPS.
Serwis KODGIS- udostępnia poprawki DGNSS, umożliwia wyznaczenie współrzędnych z błędem średnim nie przekraczającym
0,25m przy korzystaniu z odbiorników L!/L@ oraz nie przekraczającym
1,5m przy wykorzystaniu odbiorników L1.
Przeznaczony jest głównie do wykonywania pomiarów na potrzeby budowy lub aktualizacji systemów informacji przestrzennej. Dla tego typu systemów wyznaczenie współrzędnych z dokładnością kilkudziesięciu centymetrów jest w zupełności wystarczające. Serwis KODGIS może być również wykorzystywany do wspomagania służb ratowniczych, w archeologii, rolnictwie, leśnictwie, energetyce, telekomunikacji, turystyce i rekreacji, automatycznej nawigacji, itp. Wszędzie tam użytkownicy mogą stosować tańsze kodowe odbiorniki jednoczęstotliwościowe i korzystać z poprawek serwisu KODGIS, celem podniesienia dokładności wyznaczanych współrzędnych. Z wykorzystaniem tego serwisu można mierzyć szczegóły należące do II grupy dokładności pomiaru sytuacyjnego(odbiornik co najmniej L1/L2), oraz szczegóły z III grupy dokładności pomiaru sytuacyjnego.
Wykorzystując poprawki serwisu KODGIS można uzyskać powtarzalność wyznaczeń współrzędnych nie gorszą niż ±0,25 m w poziomie, co sprawia że wiele firm zajmujących się opracowaniami kartograficznymi i GIS będzie mogło wykorzystać ten serwis do wykonania niezbędnych pomiarów. Żeby system ASG-EUPOS mógł wygenerować poprawki dla danego użytkownika o takiej dokładności wymagane jest przesłanie przybliżonej pozycji odbiornika w formacie NMEA GGA. Podobnie jak w przypadku poprawek RTK system generuje poprawkę właściwą dla danego rejonu i wysyła ją do odbiornika użytkownika w formacie RTCM. Różnica polega na rodzaju danych zawartych w wiadomościach RTCM, które w przypadku serwisu KODGIS zawierają jedynie poprawki kodowe. Serwis NAWGIS - udostępnia poprawki DGNSS, umożliwia wyznaczenie współrzędnych z błędem średnim nie przekraczającym
3,0, przy wykorzystaniu odbiorników L1.
Odbiór poprawek DGNSS w tym serwisie nie wymaga dwukierunkowej komunikacji z Centrum Zarządzającym, tj. w przypadku dokładniejszego serwisu KODGIS. Nie jest wymagane przesłanie do systemu przybliżonej pozycji odbiornika, zatem z serwisu NAWGI korzystać mogą użytkownicy wyposażeni w jeszcze prostsze odbiorniki kodowe. Poprawki DGNSS wyznaczane są, w zależności od wymagań, z północnej lub południowej podsieci stacji referencyjnych dla jej punktu środkowego i przesyłane w formacie RTCM przez Internet protokołem NTRIP.
Podobnie jak w przypadku poprawek RTK z pojedynczych stacji referencyjnych system generuje poprawkę właściwą dla danej części kraju (północnej lub południowej) i wysyła ją do odbiornika użytkownika w formacie RTCM. Różnica polega na rodzaju danych zawartych w wiadomościach RTCM, które w przypadku serwisu NAWGIS zawierają jedynie poprawki kodowe.
10. Omów zastosowanie serwisów post-processingu ASG-EUPOS
Serwisy post-processingu przeznaczone są dla użytkowników pracujących z pomiarami statycznymi. Wysoka dokładność jaką charakteryzują się te pomiary uwarunkowana jest doborem otoczenia pomiarowego, klasy sprzętu GNSS oraz czasem pomiarów.
Serwis POZGEO - umożliwia wysłanie pliku obserwacyjnego do automatycznych obliczeń. Po pozytywnej weryfikacji przesłanego pliku i wykonaniu obliczeń, użytkownik otrzymuje raport z obliczeń ze współrzędnymi wyznaczanego punktu w obecnie funkcjonujących polskich układach odniesienia.
Serwis POZGEO przeznaczony jest do obliczeń w trybie postprocessingu obserwacji GPS wykonywanych metodą statyczną. Do obliczeń wykorzystywane są obserwacje fazowe z odbiorników jedno i dwuczęstotliwościowych, przekonwertowane do ustalonego formatu danych obserwacyjnych.
Dostęp do serwisu realizowany jest przez stronę internetową systemu. Po zalogowaniu się użytkownik może przesłać dane obserwacyjne za pomocą przygotowanego formularza zgłoszeń. Po przesłaniu pliku obserwacyjnego, jest on sprawdzany pod względem poprawności formatu, a następnie przekazywany do aplikacji automatycznego postprocessingu realizowanego poprzez Automatic Postprocessing Software for Trimble Application (APPS). Oprogramowanie prowadzi obliczenia bazując na podwójnych różnicach obserwacji fazowych. Dodatkową cecha oprogramowania jest korzystanie z absolutnych kalibracji dla anten GPS.
Obliczenia dla przesłanych plików obserwacyjnych wykonywane są w oparciu o 6 najbliższych stacji referencyjnych, do których wyznaczone wektory spełniają określone kryteria dokładnościowe. Na ich podstawie realizowane jest wyrównanie, którego wynikiem są współrzędne stacji w układzie ETRF2000 (ang. European Terrestrial Reference Frame). Dodatkowo współrzędne są przeliczane do układów 2000, 1992 oraz 1965. w zależności od daty wprowadzenia pliku obserwacyjnego do obliczeń używane są orbity nawigacyjne, IGS-rapid lub IGS-final.
Obliczenia w serwisie POZGEO wykonywane są dla plików obserwacyjnych spełniających poniższe kryteria:
- Obserwacje pochodzące z systemów GNSS powinny być zapisane w formacie RINEX v2.x
- Obliczenia w serwisie POZGEO prowadzone są dla obserwacji statycznych wykonanych
jednocześnie do 4 satelitów GPS.
- Maksymalny rozmiar pliku jaki może zostać przesłany w celu wykonania obliczeń wynosi
17 MB.
- Pliki obserwacyjne przesyłane do obliczeń powinny być dłuższe niż 15 minut i krótsze niż
godziny.
Serwis POZGEO D- przeznaczony jest dla użytkowników obeznanych z metodyką opracowania obserwacji satelitarnych. Jego zadaniem jest udostępnianie plików obserwacyjnych ze stacji referencyjnych systemu ASG-EUPOS oraz utworzonych wirtualnych stacji referencyjnych, na podstawie parametrów zadanych przez użytkownika.
Parametry wprowadzane przez użytkownika dotyczą wyboru stacji referencyjnych, określenia daty obserwacji, długości sesji obserwacyjnych oraz interwału rejestracji. w przypadku stacji wirtualnej należy dodatkowo określić współrzędne, dla których ma być wygenerowana. Serwis POZGEO D, podobnie jak serwis POZGEO realizowany jest poprzez stronę www systemu ASG-EUPOS. Przygotowane przez system pliki obserwacyjne pozostawiane są na serwerze www do pobrania lub wysyłane są na e-mail, określony przez użytkownika. Formaty w jakich udostępniane są dane obserwacyjne to RINEX 2.1x oraz skompresowany Compact RINEX (Hatanaka).
Ze względu na dodatkową możliwość wygenerowania wirtualnych stacji referencyjnych, użytkownik może opracować dane obserwacyjne w oparciu o dwa podejścia. Pierwsze jest klasycznym przykładem dla postprocessingu, w którym stacje referencyjne ASG-EUPOS stanowią nawiązanie dla sieci wyznaczanych wektorów. Uzyskiwana dokładność uzależniona jest od klasy sprzętu pomiarowego, środowiska pomiarowego oraz długości sesji obserwacyjnej.
Drugie podejście wykorzystujące wirtualne stacje referencyjne, pozwala na obliczenie wektorów dla krótkich sesji obserwacyjnych. Dokładność wyznaczanego wektora pozostaje w zależności od jego długości i czasu obserwacji tj. im dłuższe wektory, zalecana jest dłuższa sesja obserwacyjna. W przypadku krótkiej sesji obserwacyjnej istnieje możliwość skrócenia wyznaczanych wektorów poprzez utworzenie w otoczeniu wyznaczanego punktu wirtualnych opracowywanej sieci. Należy jednak pamiętać, ze takie nawiązanie nie bedzie już dokładnościowo tej samej klasy co punkty stacji referencyjnych.
W przypadku generowania wirtualnych stacji referencyjnych należy pamiętać że plik obserwacyjny jest przygotowywany w oparciu o najbliższą stację referencyjną (przejmuje także charakterystykę jej anteny). Aby zagwarantować poprawność obliczeń należy tak wybierać współrzędne stacji wirtualnych aby były generowane w oparciu o różne stacje fizyczne.
Serwisy post-processingu, pod względem otrzymywanych dokładności, są alternatywą dla serwisu NAWGEO w terenach o niewystarczającym zasięgu sieci GPRS.
11. Podaj zasady działania niwelacji satelitarnej i opisz od czego zależy jej dokładność
Niwelacja satelitarna polega na przeliczeniu wysokości geoidy( pomierzonych metodami GNSS) na wysokości w państwowym systemie odniesien przestrzennych Kronsztad 86. Realizuje się ją poprzez wyznaczenie odstępu geoidy do elispoidy, która jest niezbędna do realizacji wzoru : Hn=He-N. Gdzie He- wysokość elipsoidalna, hn wysokość normalna, N - odstęp geoidy od elipsoidy. W Polsce GEOIDA NIWELACYJNA 2001, jest to model siatki kwadratów, której każdy węzeł ma wyznaczony odstęp elipsoidalny. Dzięki tym wartością metodą interpolacji można wyznaczyć odstęp elipsoidalny w dowolnym punkcie modelu. Dokładność zależy od: czasu pomiaru, dokładności pomiaru, wysokości anteny, dokładności przeniesienia wysokości, metodyki pomiaru, przyjętego modelu tropo- i atmosfery, długości wektorów (czas jest od tego zależny), zasłonięcia horyzontu, użytej efemerydy w postprocessingu, geometrii sieci, dokładności pkt nawiązania.
12. Jak rozumiesz pojęcie zintegrowanej sieci geodezyjnej opartej o ASG EUPOS?
System ASG-EUPOS jest wielofunkcyjnym systemem pozycjonowania satelitarnego, opartego na powierzchniowej sieci stacji referencyjnych GNSS.
Stacja ASG-EUPOS jest to naziemna stacja referencyjna systemu ASG-EUPOS, stanowiąca punkt podstawowej osnowy geodezyjnej I klasy pod względem dokładności równoważną punktom sieci POLREF ( osnowa państwowa I klasy założona techniką satelitarną GPS):
- stacje rozmieszczone co około 70 km
- do sieci stacji referencyjnych włączone zostały istniejące stacje EPN i IGS
- współrzędne stacji w systemie ETRS89 oraz układach państwowych
- grupy stacji referencyjnych: 81 stacje krajowe z modułem GPS, 18 stacji krajowych z modułem GPS/GLONASS, 22 stacje zagraniczne, 2 centra zarządzania ( Warszawa i Katowice).
Przenoszenie na obszar Polski geodezyjnego systemu odniesienia ETRS89, którego realizacją jest układ odniesienia ETRF'89 ( EUREF), odbywa się poprzez sieć stacji referencyjnych systemu ASG-EUPOS i punktów podstawowej osnowy geodezyjnej EUREF-POL i POLREF za pośrednictwem obserwacji satelitarnych GNSS.
Na terenie Polski znajduje się 11 punktów sieci EUREF-POL, do których dowiązane są 364 punkty sieci POLREF- Polish Reference Frame ( rozmieszczone na terenie całego kraju w odległościach około 25 km).
System EUPOS:
- wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji
- 16 państw centralnej i wschodniej Europy
- zachowany jednolity standard techniczny i wymiana danych ze stacji przygranicznych
- system odniesienia ETRS'89 i narodowe systemy współrzędnych ( w Polsce układy `2000' i `1992')
13. Wymień serwisy ASG-EUPOS i przyporządkuj im prace geodezyjne, które można z ich pomocą wykonać.
System ASG-EUPOS może zostać wykorzystany do zakładania szczegółowych poziomych osnów geodezyjnych II i III klasy, osnów pomiarowych: poziomych i wysokościowych, w pomiarach sytuacyjno-wysokosciowych, w pomiarach realizacyjnych, pomiarach związanych z katastrem nieruchomości , pomiarach związanych z pozyskiwaniem danych do krajowego systemu informacji o terenie oraz do innych prac geodezyjnych jeżeli dokładnośći gwarantowane w wykorzystywanych serwisach systemu są wystarczające.
System ASG-EUPOS umożliwia korzystania z następujących serwisów i usłóg:
-POZGEO serwis automatycznych obliczeń w trybie postprocessingu obserwacji GPS wykonywanych metodą statyczną, umożliwiający wyznaczenie współrzędnych w państwowych systemie odniesień przestrzennych. Dopuszcza się wykorzystanie do wyznaczenia współrzędnych punktów geodezyjnej poziomej osnowy pomiarowej.
-POZGEO D serwis udostępniania zbiorów obserwacji satelitarnych GNSS w wybranych przez użytkownika stacji referencyjnych systemu ASG-EUPOS, a także obserwacji interpolowanych dla pozycji określonej przez użytkownika zakładać osnowy pomiarowe
-NAWGEO serwis obejmujący udostępnianie poprawek RTK, umożliwiający wyznaczenie pozycji poziomej z błędem średnim nie przekraczającym ±0,03m i wysokości ±0,05m przy wykorzystaniu odbiornika L1/L2. W zależności od trybu pomiaru można pomierzyć:
*punkty osnowy pomiarowej i wysokościowej, szczegóły sytuacyjne będące przedmiotem ewidencji gruntów i budynkó oraz punkty dostosowania wykorzystane w transformacji
*szczegóły sytuacyjne należące do I grupy dokładnościowej
*szczegóły sytuacyjne należące do II grupy dokładnościowej
*szczegóły sytuacyjne należące do III grupy dokładnościowej
*dopuszcza się pomiar ekscentryczny punktów niedostępnych do bezpośrednio pomiaru RTK wykorzystując wcięcie liniowe lub domiary ortogonalne pod warunkiem zachowania wymaganych dokładności dla danego typu prac geodezyjnych oraz dla długości elementów takiej konstrukcji geometrycznej poniżej 50m
-KODGIS serwis obejmujący udostępnianie poprawek DGNSS, umożliwiający wyznaczenie współrzędnych z błędem średnim nie przekraczającym ±0,25m przy wykorzystaniu z odbiorników L1/L2 oraz nie przekraczającym ±1,5m przy wykorzystaniu odbiorników L1
-NAWGIS serwis obejmujący udostępnianie poprawek DGNSS, umożliwiający wyznaczenie współrzędnych z błędem średnim nie przekraczającm ±3,0m przy wykorzystaniu odbiorników L1.
Minimalne warunki pomiary DGNSS(czyli kod gis i nawgis):
*szczegóły należące do II grupy dokładności pomiaru sytuacyjnego
*szczegóły należące do III grupy dokładności pomiaru sytuacyjnego
Jak widzisz dalszy rozwój systemów GNSS? (wizja Kapłona)
w chwili obecnej niedogodnością systemów GNSS jest ograniczona dostępność sygnału, w związku z czym w przyszłości nastąpi zwiększenie liczby satelitów, aby sygnał mógł być odbierany z każdego miejsca na Ziemi
w celu poprawienia dokładności pomiarów nastąpi wzrost ilości dostarczanych informacji poprzez zwiększenie liczby częstotliwości L1, L2, L5 i inne; poprzez pomiary na kilku częstotliwościach eliminujemy błędy, (np. błąd jonosfery przy pomiarach L1/L2) jednak są błędy których nie da się wyeliminować w ten sposób
rozwój systemów GNSS następuje poprzez odchodzenie od rozwiązań sieciowych w kierunku PPP (przestrzenne wcięcie wstecz), które wykorzystują obserwacje kodowe i fazowe; w PPP występują błędy zegara satelity oraz zegara odbiornika, których wyeliminowanie jest możliwe poprzez użycie droższych zegarów o większej dokładności lub poprzez dystrybuowanie czasu za pomocą internetu; dokładniejsze określenie pozycji satelity za pomocą systemu DORIS
rozwój w niwelacji satelitarnej polega na podniesieniu dokładności pomiarów wysokościowych. Nastąpi to poprzez wykorzystanie systemu GBAS w celu wyznaczenia poprawki troposferycznej w pomiarach RTK
dla geodetów w najbliższym czasie nic się nie zmieni
system GALILEO ma szanse na funkcjonowanie dopiero w roku 2019-2020
w ASG-EUPOS zostanie powszechnie wprowadzony system GLONASS, co może wpłynąć na zwiększenie dostępności satelitów
Omów różnicę pomiędzy pomiarami DGNSS a RTK
pomiar DGNSS - różnicowe pomiary satelitarne GNSS oparte na pomiarach kodowych
pseudoodległości do satelitów, przy których wyznaczane współrzędna są
korygowane za pomocą poprawek DGNSS (serwis KODGIS 0,25m przy L1/L2
1,5m przy L1; serwis NAWGIS 3m przy L1)
pomiar RTK - różnicowe pomiary satelitarne polegające na pomiarach fazowych
pseudoodległości do satelitów, przy których wyznaczane współrzędne są na bieżąco
korygowane za pomocą poprawek RTK (serwis NAWGEO 0,03m i 0,05 przy L1/L2)
1) Jak wynika z powyższych definicji różnica między metodami wynika ze sposobu pomiaru pseudodległości do satelity- pomiary kodowe dla DGNSS i fazowe dla RTK.
2) Dla współrzędnych uzyskanych metodą :
* pomiaru RTK mamy poprawki RTK uzyskane z seriwu NAWGEO
* pomiaru DGNSS mamy poprawki DGNSS uzyskane z serwisu KODGIS lub NAWGIS.
Poprawki udostępniane przez te serwisy różnią się dokładnością, dlatego metody pomiaru RTK i DGNSS dzielimy ze względu na ich wykorzystania w pomiarach geodezyjnych.
Metodą pomiaru RTK można mierzyć:
* punkty osnowy pomiarowej sytuacyjnej i wysokościowej, szczegóły sytuacyjne będące przedmiotem
ewidencji gruntów i budynków oraz punkty dostosowania wykorzystywane w transformacji
* szczegóły sytuacyjne należące do I grupy dokładnościowej
* szczegóły II i III grupy
Metodą pomiaru RTK można mierzyć:
* szczegóły II i III grupy
Różnice zachodzące w dokładnościach między 2oma niezależnymi pomiarami punktu kontrolnego oraz pomiarami szczegółów II i III grupy dokładnościowej przedstawia poniższa tabela.
pomiar RTK |
pomiar DGNSS |
Δ wsp.w przypadku dwukrotnego, niezależnego pomiaru |
Δ wsp.w przypadku dwukrotnego, niezależnego pomiaru |
Warunki pomiaru szczegóły II gr. dokładnościowej * dla interwału zapisu pozycji 1 s czas pomiaru powinien wynosić min 3s |
Warunki pomiaru szczegóły II gr. dokładnościowej * odchylenie standardowe pozycji dla składowej poziomej powinno być mniejsze lub równe ±0,30 m, * dla interwału zapisu pozycji 1 s czas pomiaru powinien wynosić 5s |
Warunki pomiaru szczegóły III gr. dokładnościowej a) odchylenie standardowe pozycji dla składowej poziomej powinno być mniejsze lub równe ±0,10 m |
Warunki pomiaru szczegóły III gr. dokładnościowej |
16. Omów różnicę między RTK, a RTN
Oba typy pomiarów to ciągłe pomiary kinematyczne. Ciągłe pomiary kinematyczne - klasyczna metoda bazująca na opracowaniu obserwacji w tzw. post-processingu. Stosowana do dzisiaj w przypadkach, gdy metody RTK nie zdają egzaminu, np. przy wyznaczaniu środków rzutów kamery w nalotach fotogrametrycznych.
RTK (Real Time Kinematic) - metoda kinematyczna z wyznaczeniem pozycji w czasie rzeczywistym. Warunkiem realizacji pomiarów RTK:
bezpośrednia łączność między stacją bazową a odbiornikiem ruchomym. Informacje ze stacji bazowej w postaci obserwacji lub poprawek do obserwacji są przesyłane do odbiornika ruchomego, gdzie następuje proces opracowania i wyznaczenia pozycji. Opracowanie obserwacji ze stacji bazowej oraz odbiornika ruchomego następuje bezpośrednio w terenie w przenośnym komputerze. Metoda bazuje na algorytmie OTF.
Wymaga widoczności minimum 5 satelitów powyżej 150.
konieczność zapewnienia ciągłej łączności między stacją bazową i odbiornikiem ruchomym oraz ograniczeniem zasięgu metody wynikającym z możliwości uproszczonych algorytmów stosowanych w komputerze przenośnym.
Typowe warunki pomiarów RTK to:
Inicjalizacja około 1 minuty,
Pomiar pikiety 3-5 sekundy,
Zasięg pomiarów 10 do 30km,
Dokładność ±1-2cm+2ppm-S dla składowych horyzontalnych i około ±3cm+2ppm-S dla składowej wysokościowej.
Powierzchniowe RTK (RTN) - w pomiarach tych rolę stacji bazowej przejmuje sieć stacji permanentnych przesyłających dane obserwacyjne w czasie rzeczywistym do Centrum Zarządzania. Oprogramowanie sterujące w Centrum Zarządzania przetwarza dane ze stacji tworząc albo poprawki powierzchniowe wysyłane do użytkownika, albo obserwacje z Wirtualnej Stacji Referencyjnej (VRS). Zaletą systemu powierzchniowego RTK jest możliwość pracy z jednym odbiornikiem ruchomym. Rolę stacji bazowej przejmuję na siebie system. Odległości między stacjami według obecnych warunków oprogramowania Centrum Zarządzania mogą wynosić 70-80 km, a otrzymywane dokładność i niezawodność wyznaczenia pozycji jest wyższa niż dla typowych pomiarów RTK
17 . Co wchodzi w skład Państwowego Systemu Odniesień Przestrzennych (+ opis)
Państwowy System Odniesień Przestrzennych tworzą:
Geodezyjny układ odniesienia (EUREF-89 = ETRF-89)
Układ wysokości
Układ współrzędnych płaskich prostokątnych „2000” (mapa zasadnicza)
Układ współrzędnych płaskich prostokątnych „1992” (mapy w skali 1:10 000 i w skalach mniejszych)
Ad. 1 Samo pojęcie systemu ma charakter bardzo ogólny. Obejmuje on zarówno definicję układu współrzędnych w ujęciu teoretycznym i aplikacyjnym (definicję układu odniesienia), jak też całą strukturę organizacyjno-techniczną oraz naukową związaną z realizacją tego układu, jego funkcjonowaniem i permanentną kontrolą.
ITRS (ang. International Terrestrial Reference System) oraz ETRS (ang. European Terrestrial Reference System) są skróconymi nazwami odpowiednio: globalnego (międzynarodowego) i europejskiego (jako podsystemu kontynentalnego) systemu odniesień przestrzennych.
Definicje układów współrzędnych opierają się na matematyczno-fizycznych modelach Ziemi (określanych rezolucjami Międzynarodowej Unii Geodezji i Geofizyki oraz Międzynarodowej Asocjacji Geodezji), metryce i standaryzacji przestrzeni geodezyjnej. Stosowane obecnie modele to GRS'80 (ang. Geodetic Reference System'80) oraz zmodyfikowany później WGS'84 (ang. World Geodetic System' 84). Model Ziemi obejmuje zbiór parametrów geometryczno - fizycznych. Elementem geometrycznym jest elipsoida odniesienia, która przyjmuje nazwę modelu. Elipsoidy GRS'80 i WGS'84 nie różnią się istotnie parametrami geometrycznymi (różnica półosi b nie przekracza 0.1mm), dlatego w odwzorowaniach kartograficznych nie dokonuje się w zasadzie rozróżniania elipsoid. WGS'84 jest aktualnie przyjętą elipsoidą globalnego, satelitarnego systemu obserwacyjno - pozycyjnego GPS (ang. Global Positioning System). Elipsoidę GRS'80 stosuje się formalnie w Polsce w odwzorowaniach kartograficznych, nowych państwowych układów współrzędnych "1992", "2000".
Praktyczną (fizyczną) realizacją (aplikacją) układu współrzędnych w systemie ITRS / ETRS jest układ odniesienia ITRF / ETRF (ang. International / European Reference Frame lub krócej: European Frame - EUREF) tworzony fizycznie przez sieć stacji obserwacyjnych, rozlokowanych w stabilnych tektonicznie rejonach świata i kontynentu. Układ odniesienia w rozumieniu zbioru punktów powiązanych z Ziemią, jest obiektem dynamicznym, poddanym permanentnym obserwacjom. Stanom quasi-statycznym (epokowym) sieci stacji ITRF / ETRF przypisuje się indeks epoki obserwacyjnej. Celem ujednolicenia pomiarów geodezyjnych, obserwacje aktualne, dotyczące wyznaczeń położeń punktów, redukuje się do umownego stanu początkowego. W Polsce, obowiązuje redukcja pomiarów poziomych do epoki 1989,0 (ETRF'89). Państwowe osnowy geodezyjne, poziome i trójwymiarowe (EUREF-POL + POLREF) są dowiązane do punktów sieci europejskiej w układzie ETRF'89.
Ad. 2 Układ wysokości tworzą wartości geopotencjale podzielone przez przeciętne wartości przyspieszenia normalnego siły ciężkości, zwane dalej „wysokościami normalnymi”, odniesione do średniego poziomu Morza Bałtyckiego w Zatoce Fińskiej, wyznaczonego dla mareografu w Kronsztadzie koło Sankt Petersburga.
Ad. 3 Układ współrzędnych płaskich prostokątnych „2000”, wg teorii odwzorowania kartograficznego Gaussa-Krügera. Obszar kraju dzieli się na cztery pasy południkowe o szerokości 3̊ długości geograficznej każdy i o południkach osiowych 15̊, 18̊, 21̊ i 24̊ długości geograficznej wschodniej, ponumerowane odpowiednio 5, 6, 7 i 8.
Współczynnik zmiany skali w południku osiowym każdego pasa południkowego równa się 0,999923
Punkt przecięcia się obszaru równika z obszarem południka osiowego otrzymuje współrzędną x = 0, a punkty leżące na południku osiowym współrzędną y = 500 000m. Aby jednoznacznie określić położenie punktu przed współrzędną y podaje się numer pasa południkowego
L0 = 15̊ y = 5 500 000
L0 = 18̊ y = 5 500 000
L0 = 21̊ y = 5 500 000
L0 = 24̊ y = 5 500 000
Ad. 4 Układ współrzędnych płaskich prostokątnych „1992”, wg teorii odwzorowania kartograficznego Gaussa-Krügera. Pas południkowy o szerokości obejmującej cały obszar kraju, o południku osiowym 19̊ długości geograficznej wschodniej. Współczynnik zmiany skali 0,9993 w południku osiowym. Punkt przecięcia się obrazu równika z obrazem południka osiowego otrzymuje współrzędną x = - 5 300 000m, a punkty leżące na południku osiowym współrzędną y = 500 000.
18. Wymień obowiązujący akty prawne, instrukcje i zalecenia techniczne dotyczące wykonywania pomiarów sytuacyjno-wysokościowych technikami GNSS.
Przepisy prawa geodezyjnego odnoszące się do pomiarów GNSS
1.Konstytucja RP- def. ukłąd i kompetencje instytucji państwowych na rzecz których wykonuje się prace
2.Ustawy:
-z dn. 17 maja 1989r. Prawo geodezyjne i Kartograficzne(tekst jednolity Dz. U. z 2010r. nr 193, poz.1287)
-z dn. 4.03.2010r. o iinfrastrukturze informacji przestrzennej( dz. U. z 2010r. nr 76, poz.489)
3. Rozporządzenie Ministra Rozwoju Regionalnego i Budownictwa z dnia 16 lipca 2001 r. w sprawie zgłaszania prac geodezyjnych i kartograficznych, ewidencjonowania systemów i przechowywania kopii zabezpieczających bazy danych, a także ogólnych warunków umów o udostępnianie tych baz.
4. Instrukcja G-4 (1988)
Inne dokumenty nie są prawomocne, ale Główny Geodeta Kraju oraz ośrodki zalecają korzystanie
Instrukcje:
-G-4 (2011)
-O-1
-O-3
-G-1
-G-2
-G-3
Wytyczne techniczne:
-G-1.5
-G-1.9
-G-1.10
-G-2.1
-G-2.2
-G-3.1
-G-3.2
Zalecenia techniczne G-1.10- pomiary satelitarne GNSS oparte na systemie stacji referencyjnych ASG-EUPOS
Wyszukiwarka