 | Pobierz cały dokument 6a.agh.semestr.iv.tmm.majkut.felis.cwiczenia.doc Rozmiar 558 KB |
Teoria Mechanizmów
i Maszyn
Analiza kinematyczna i kinetostatyczna mechanizmu suwakowego
Mech-6/A
xxxxxxxxxxxxxx
WIMiR gr. 1x rok II C
Rok akademicki 2010/2011
Synteza strukturalna i geometryczna mechanizmu
Symboliczny zapis struktury i parametrów projektowanego mechanizmu przedstawia tabela
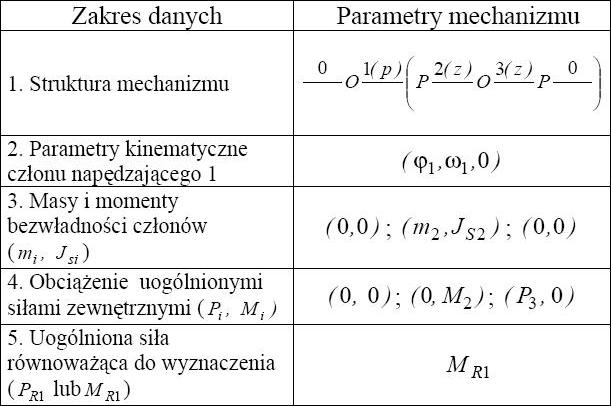
1.1 Budowa łańcucha kinematycznego - schemat ideowy.
Zgodnie z numerem zadania przyjęto wymiary mechanizmu i położenie jak na rysunku.
AB = 0,5m P3 = 200 N
BS2 = 0,15m P3 || CE
BC = 0,3m ![]()
CD = 0,2m
CE = 0,6m
![]()
φ1 = 135°
ω1 = 2![]()
1.2 Ruchliwość i klasa mechanizmu
Ruchliwość mechanizmu
w=3n-p4-2p5
liczba członów n = 3; liczba par kinematycznych klasy IV p4=0; liczba par kinematycznych klasy V p5=4; (0,1), (1,2), (2,3), (3,0)
![]()
Klasa mechanizmu
Po odłączeniu członu napędzającego 1, pozostałe człony tworzą grupę strukturalną.
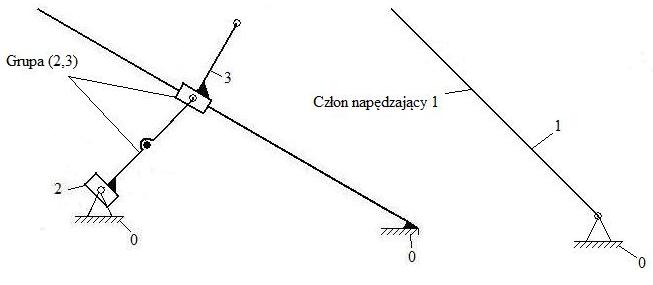
Badam ruchliwość grupy strukturalnej po połączeniu jej członów ruchomych z podstawą; n=2, p5=3; (0,2), (2,3), (3,0).
wgr=3n-2p5=![]()
=0
Grupa strukturalna (2,3) jest grupą klasy 2, postaci 4.
Analizowany mechanizm składa się z członu napędzającego 1 i grupy strukturalnej klasy 2, jest więc mechanizmem klasy 2.
Nazwa strukturalna mechanizmu: mechanizm suwakowy
2. Analiza kinematyczna mechanizmu
2. 1 Metoda grafoanalityczna (metoda planów)
Plany prędkości i przyspieszeń rysuję w podziałce kV = ![]()
![]()
dla prędkości i ka = ![]()
![]()
dla przyspieszeń.
PLAN PRĘDKOŚCI:
Ponieważ człon 2 porusza się ruchem płaskim, a jego ruch jest złożeniem ruchu obrotowego członu 1 (ruch unoszenia) i ruchu postępowego wzdłuż członu 1:
ω2 = ω1
VA = 0
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Z planu prędkości odczytuję wartości:
VB2 = 3,2878![]()
VCB = 0,6![]()
VC2 = VD = 3,8637![]()
VB2B1 = 3,1321![]()
VS2 = 3,5794![]()
PLAN PRZYSPIESZEŃ:
Ponieważ ω1 jest stała:
ε1 = ε2 = 0
![]()
= ![]()
= 2![]()
![]()
= ![]()
= 12,5284![]()
![]()
= ![]()
= 1,2![]()
![]()
= ![]()
= 0,6![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 | Pobierz cały dokument 6a.agh.semestr.iv.tmm.majkut.felis.cwiczenia.doc rozmiar 558 KB |