1.Elementy schematów zastępczych źródeł i odbiorników energii elektrycznej.
W ujęciu obwodowym źródła i odbiorniki elektryczne są elementami obwodów elektrycznych o określonej liczbie zacisków i określonej topologii. Są to modele rzeczywistych obiektów źródłowych i odbiorników, opisujące ich działanie z punktu widzenia zależności między zaciskami. W skład rozumianych w ten sposób źródeł i odbiorników elektrycznych może wchodzić wiele zespolonych w jedną całość obiektów źródłowych i odbiornikowych.
-Elementy pasywne [straty stałe] (niezależne od obciążenia);
-Elementy aktywne [straty zmienne] (zależne od obciążenia).
Tzw. Rzeczywiste źródło napięciowe - obciążone impedancją lub rezystancją. {Rys 1.1 i 1.2}
Tzw. Rzeczywiste źródło prądowe - obciążone impedancja lub rezystancją. {Rys. 1.3 i 1.4}
2. Moce tracone w zastępczych źródłach równoważnych ze względu na wielkości zaciskowe.
Moce tracone ΔPu=RwI² ( w rzeczywistym źródle napięciowym) i ΔPi=RwI²(R/Rw)² (w rzeczywistym źródle prądowym) są równe tylko wtedy, gdy R=Rw lub │Z│=│Zw│. Oprócz tego szczególnego przypadku nie zachodzi równoważność rzeczywistych źródeł - napięciowego i prądowego. Ze względu na moce tracone nie jest obojętne, który z schematów zastępczych przyjmiemy za model rzeczywistego obiektu źródłowego. Na ogół bardziej odpowiedni jest model źródła napięciowego.
3. Straty mocy w materiałach elektrycznych i magnetycznych - rzeczywisty kondensator, rzeczywista cewka, dławik.
W rzeczywistych elementach elektrycznych zawsze występuje dyssypacja (rozproszenie) energii w formie ciepła - czy to użytkowego czy też strat.- Rzeczywista cewka {Rys. 3.1 i 3.2} Q= XL·I²= UL·I; P= R·I²= UR·I; Dobroć cewki: QL=Q/P= UL/ UR=ωL/R
- Rzeczywisty kondensator {Rys. 3.3 i 3.4} Q= Bc·U²; P= G·U, P=Q·tgδ; Dobroć kondensatora: Qc=Q/P= IL/ IR=RωC
- Dławik {Rys. 3.5 i 3.6} Straty w rdzeniu dławika: ΔPfe=Rfe· Ife² - średnia moc strat. ΔPfe=C·f1,5-1,6 B²
4.Schemat zastępczy transformatora jednofazowego. {Rys. 4}
5.Przemiany energii w przetworniku typu elektromagnes.
Elektromagnesy z ruchomą zworą, głośniki elektrodynamiczne, maszyny elektryczne i większość mierników elektrycznych zaliczamy do elektromechanicznych przetworników energii o polu magnetycznym. Przy udziale pola magnetycznego przetwarzają one energię elektryczną na mechaniczną (silniki, siłowniki, mierniki elektryczne), Mechaniczną na elektryczną (prądnice, czujniki generatorowe), albo energię elektryczną jednego rodzaju na drugi (przetwornica jednotwornikowa).
6. Moment obrotowy w przetworniku zasilanym jednostronnie.
Gdy na części ruchomej lub nieruchomej, przez którą przebiega główny obwód magnetyczny znajdują się uzwojenia to jest to przetwornik zasilany jednostronnie.
![]()
lub ![]()
![]()
Moment osiąga ekstremalne wartości, gdy: γ=1/4∏; 3/4∏; 5/4∏; 7/4∏ a jest równy zeru, gdy: γ=0 ; 1/2∏; 3/2∏;
7. Moment obrotowy w przetworniku zasilanym, dwustronnie.
Gdy na części ruchomej i nieruchomej, przez którą przebiega główny obwód magnetyczny znajdują się uzwojenia to jest to przetwornik zasilany dwustronnie.
![]()
Lub ![]()
Moment osiąga największe wartości bezwzględne, gdy γ=+/- 1/2∏ tzn. gdy strumienie wytworzone przez i1 i i2 są do siebie prostopadłe.
Ujemne wartości odpowiadają działaniu hamującemu a dodatnie napędzającemu.
8.Zmiana pracy mechanicznej na energię elektryczną (prądnica) oraz energii elektrycznej na pracę mechaniczną (silnik elektryczny).
W maszynie elektrycznej pracującej jako silnik, do twornika doprowadzona jest moc elektryczna pel która ulega przetworzeniu na moc mechaniczną pmech .
W maszynie pracującej jako prądnica do twornika doprowadzona jest moc elektryczna pel będąca produktem przetworzenia mocy mechanicznej pmech .
![]()
![]()
9.Zasady działania mierników magnetoelektrycznych, elektrodynamicznych i elektromagnetycznych.
-Mierniki magnetoelektryczne (ME)
Cewka nałożona na bęben sztabowy umieszczona miedzy nad biegunikami magnesu trwałego.
me~BiI ( B=const. czyli μ=c·I) używane jako woltomierze i amperomierze prądu stałego oraz galwanometry.
-Mierniki elektrodynamiczne (ED)
Dwie cewki nieruchoma oraz umieszczona wewnątrz niej ruchoma.
M=Ci1,i2 używane jako woltomierze, amperomierze, watomierze przy prądzie stałym i zmiennym.
-Mierniki elektromagnetyczne (EM)
Cewka i wciągany do niej rdzeń stalowy o odpowiednim kształcie. Skala nierównomierna. Używamy jako woltomierze i amperomierze prądu przemiennego i stałego.
10.Nagrzewanie się i stygnięcie modelowego ciała jednorodnego.
Ze względu na nagrzanie każde urządzenie energoelektryczne tworzy z otoczeniem układ termokinetyczny. Najprostszym modelem takiego układu jest ciało cieplne jednorodne o nieskończonej dużej przewodności cieplnej.
Rezystancja termiczna (opór cieplny) ![]()
Pojemność cieplna ![]()
Przyrost temperatury ![]()
; Moc cieplna ![]()
![]()
![]()
- składowa ustalona ![]()
- składowa swobodna (przejściowa)
Przy skokowych zmianach mocy cieplnej, temperatura ciała zmienia się w sposób wykładniczy.
11. Obciążenie ciągłe, dorywcze i przerywane
Obciążenie przedstawione jest w postaci obciążenia zastępczego o ograniczonej liczbie parametrów.
- obciążenie ciągłe, czyli o określonej stałej wartości w długim czasie.
- obciążenie dorywcze, czyli o określonej stałej wartości w określonym, krótkim zwykle czasie i następującej po nim długiej przerwie.
- obciążenie przerywane, czyli okresowe regularne, o krótkim cyklu, podzielonym w określonym stosunku na czas określonego, stałego obciążenia i czas przerwy.
12.Warunki pracy systemowe i środowiskowe
Rysunki
13.Układy sieci i rodzaje torów elektroenergetycznych
Układy sieci SN:
- promieniowy - pętlowy - promieniowy z magistralą - dwuliniowy - wieloliniowy
Sposoby zasilania - tory elektroenergetyczne
- otwarte - węzłowe - zamknięte - okrężne
14.Parametry jakości energii elektrycznej dostarczonej odbiorcom
- stałość napięcia - stałość częstotliwości napięcia - symetria fazowa napięć - zawartość zniekształceń krzywej napięcia - ciągłość dostawy energii
15. Symetryczny odbiornik trójfazowy zasilany trójprzewodowo, z przerwą jednej fazie.
16. Symetryczny odbiornik trójfazowy, zasilany trójprzewodowo, ze zwarciem w jednej fazie
17. Pomiary mocy czynnej i biernej odbiorników trójfazowych ( niesymetrycznych oraz symetrycznych, przy zasilaniu trój- lub czteroprzewodowym).
Pomiary mocy czynnej Do pomiaru mocy czynnej w układzie czteroprzewodowym potrzebne są 3 watomierze. Każdy z watomierzy mierzy moc pobieraną przez jedną z faz odbiornika.
Moc czynną wyznaczamy ze wzoru całkowego:
P = 1/T ![]()
=UaIacosφa+UbIbcosφb+UcIccosφc
T- okres; Ua, Ub, Uc, Ia, Ib, Ic - wartości skuteczne napięć i prądów fazowych;
φa, φb, φc - Katy przesunięć fazowych między napięciami i prądami.
Moc czynna pobierana przez odbiornik trójfazowy jest równa sumie mocy czynnych pobieranych przez poszczególne fazy odbiornika.
W przypadku symetrii napięcia i prądy fazowe mają jednakowe wartości skuteczne:
Uf = Ua = Ub = Uc If = Ia = Ib = Ic kąty również są sobie równe, wtedy:
P = 3UfIfcosφf
W przypadku trudności pomiarów napięć i prądów fazowych moc w obwodach trójfazowych symetrycznych wyrażamy za pomocą napięć między fazowych prądów liniowych, które oznaczamy przez U, I bez wskaźników. Wskaźników tym celu podstawiamy do wzoru P= 3UfIfcosφf (w gnieździe: Uf = U/![]()
, If = I; w trójkącie: Uf = U, If = I/![]()
stąd mamy: P = ![]()
UIcosφ przy czym kąt φ = φf.
Do pomiaru mocy czynnej w ukł. Trójprzewodowym potrzebne są 2 watomierze, których cewki prądowe włącz się w dowolne 2 przewody mierzonego obwodu trójfazowego początki cewek napięciowych przyłącza się do tychże przewodów a końce do przewodu trzeciego.Moc czynna pobierana przez odbiornik bez względu na symetrię układu odpowiada P1 + P2 = P P1 = UacJacos( Uac, Ia ) P2 = UbcIbcos( Ubc, Ib )
Watomierz liczy wartość średnią iloczynu napięcia na cewce napięciowej i prądu w cewce prądowej.
Pomiary mocy biernejMoc bierna wydawana przez dowolne trójfazowe źródło napięcia lub pobierana przez odbiornik trójfazowy jest równa sumie mocy biernych poszczególnych faz. Moc bierna w układzie czteroprzewodowymQ = Qa + Qb + Qc = UaIasinφa + UbIbsinφb + UcIcsinφcA w przypadku symetrii
Q = 3UfIfsinφf = ![]()
UIsinφ Moc bierna w ukł. Trójprzewodowym o symetrycznym zasilaniu i obciążeniu, moc bierna:
Q = ![]()
(P1 - P2) ; P1 - P2 - różnica wskazań obu watomierzy
18. Przekładnia i kąt godzinowy transformatora trójfazowego.
Kąt godzinowy - różnica faz początkowych odpowiadających sobie napięć międzyfazowych, wyrażona wielokrotnością kąta Π/6.
Stosunek wartości zespolonych napięć U1 / U2 jest, więc liczbą rzeczywistą, równą stosunkowi liczb zwojów Z1 / Z2 i zwaną przekładnią transformatora, którą oznaczamy literą grecką. Napięcia U1, U2 są zgodne ze sobą w fazie. Dla wartości skutecznych jest tak samo.
19. Układ połączeń i grup połączeń transformatora trójfazowego.- gwiazda- trójkąt- zygzakGrupa połączeń transformatora 3 - fazowego - symbol układu połączeń z dopisanym kątem godzinowym, np. Yd5
20. Warunki pracy równoległej transformatorów trójfazowych.
Praca równoległa transformatorów to zasilanie ich z tej samej sieci „pierwotnej” i obciążanie poprzez tę samą sieć „wtórną”. Pracę || transfor. Można nazwać idealną, jeśli:
— nie płyną prądy w uzwojeniach wtórnych w stanie jałowym (kąty godzinowe oraz przekładnie transfor. Pracujących || powinny być jednakowe) — obciążenie mocą pozorną rozkłada się proporcjonalnie do mocy znamionowych, przy tym całk. Prąd obciążenia jest algebr. Σ Poszczególnych prądów (występuje zgodność kątów fazowych tych prądów).
Warunki pracy: trójkąty wewnętrznych spadków napięć w transfor. Pracujących ||, obciążonych prądami znamionowymi I=In muszą być jednakowe, oznacza to równość iloczynów Zz * In oraz kątów zwarciowych ϕzn równość napięć zwarcia transfor. Przy pracy ||.
21. Moc przechodnia i moc własna autotransformatora.
![]()
Gdzie Sfp - fazowa moc przechodnia,
![]()
Sfw - fazowa moc własna?
Z porównania powyższych powstaje stosunek: 
(![]()
to „ni”) , który określa, jaka część mocy pobieranej przez odbiór jest przekazywana do obwodu wtórnego w wyniku transformacji, a także, jaka część prądu Id płynie przez wspólną część uzwojenia o liczbie zwojów zd.
Zatem: moc własna Sw jest znacznie mniejsza od mocy przechodniej Sp.
22. Spadek napięcia i strata napięcia oraz strata mocy czynnej i biernej na odcinku linii prądu przemiennego (jednofazowej i trójfazowej).
Względny spadek napięcia między dowolnymi punktami sieci różnonapięciowej jest równy sumie względnych spadków napięcia na wszystkich elementach, które tworzą drogę przepływu prądu.
Napięcia w różnych punktach sieci prądu przemiennego różnią się nie tylko, co do wartości, lecz także, co do kąta fazowego. Różnica wykazów zespolonych tych napięć nosi nazwę straty napięcia.
Straty mocy czynnej występują w elementach rezystancyjnych sieci, a straty mocy biernej w elementach reaktancyjnych (indukcyjnych).
Strata napięcia fazowego: ![]()
Straty mocy w linii trójfazowej obciążonej symetrycznie są równe trzykrotnej wartości strat
Mocy w jednej fazie. Napięcie międzyprzewodowe linii jednofazowej jest równe napięciu fazowemu U=Uf , a linii trójfazowej jest ![]()
razy większe od napięcia fazowego U=![]()
Uf .
W efekcie otrzymujemy: — spadek napięcia wzory dla
— strata mocy czynnej P linii 1 i 3
— strata mocy biernej Q. Fazowej. Oczywiście S to moc pozorna.
23. Naturalne sposoby poprawy współczynnika mocy oraz komensacja mocy biernej indukcyjnej w trójfazowej sieci zasilającej.
Współczynnik mocy to miara pobieranej albo przesyłanej mocy biernej: 
Naturalne sposoby poprawy tegoż cosϕ : należy dążyć do zmniejszenia poboru mocy biernej z sieci poprzez poprawny dobór i racjonalną eksploatację urządzeń odbiorczych.
Kompensacja to zmniejszenie spadku napięcia i strat mocy biernej w linii. Uzyskuje się to przez instalowanie dodatkowych odbiorników pojemnościowych, tzw. kompensatorów poprzecznych (mogą to być baterie kondensatorów lub przewzbudzone silniki synchroniczne). Zapotrzebowanie na moc bierną zmienia się wraz ze zmianami obciążenia sieci mocą czynną. Dlatego też kompensatory poprzeczne wyposaża się w regulatory współczynników mocy.
24. Wytwarzanie pól magnetycznych nieruchomych (stałych i przemiennych) i ruchomych (wirujących i biegnących). [???]
W maszynie elektrycznej prądu stałego pole magnetyczne jest nieruchome w przestrzeni i dlatego uzwojenie twornika wykonuje się jako zamknięte, połączone z obwodem zewnętrznym poprzez ruchomy zestyk komutator-szczotki. Rola tego zestyku polega na zmianie zwrotu prądów w bokach zezwojów (przemienne - chyba tak?).
W bezkomutatorowych maszynach prądu przemiennego pole magnetyczne jest zazwyczaj ruchome (wirujące lub biegnące), ewentualnie - nieruchome (przemienne). Pole wirujące może być wytwarzane w sposób elektromechaniczny - poprzez wirującą magneśnicę o stałym strumieniu albo w sposób elektryczny - przez symetryczny układ prądów, płynących w uzwojeniach fazowych maszyny, które są symetrycznie rozmieszczone w przestrzeni. //Czarna magia
25. Budowa trójfazowych silników indukcyjnych (pierścieniowych, klatkowych i liniowych).
Silnik pierścieniowy: ma wirnik pierścieniowy, w którym znajduje się uzwojenie trój-fazowe, symetryczne - tego typu, co w stojanie - połączone w gwiazdę, z końcówkami przyłączonymi do trzech pierścieni. Silnik klatkowy: w żłobkach wirnika klatkowego rozmieszczone są pręty przewodzące (z aluminium), zwarte pierścieniami na obwodzie - z obydwu stron wirnika. Powstała klatka jest uzwojeniem wielofazowym.
Silnik liniowy: NULL!
26. Częstotliwości napięć indukowanych w wirniku trójfazowej maszyny indukcyjnej; pojęcie poślizgu.
Częstotliwość napięć indukowanych w wirniku f2 jest proporcjonalna do różnicy prędkości kątowej pola stojana ω1 i prędkości kątowej wirnika ω. Przy nieruchomym wirniku f2=f.
Stosunek f2 do f oznacza się s i nazywa poślizgiem: 
. 
, n - prędkość obrotowa. Wartość poślizgu zależy od obciążenia silnika i zwykle wynosi od 2 do 6%.
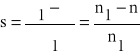
27. Schemat zastępczy trójfazowego silnika indukcyjnego. [Rys. 3.13. albo uproszczony 3.15.]
Silnik dwuobwodowy, dwuczęstliwościowy;
b) silnik jednoobwodowy.
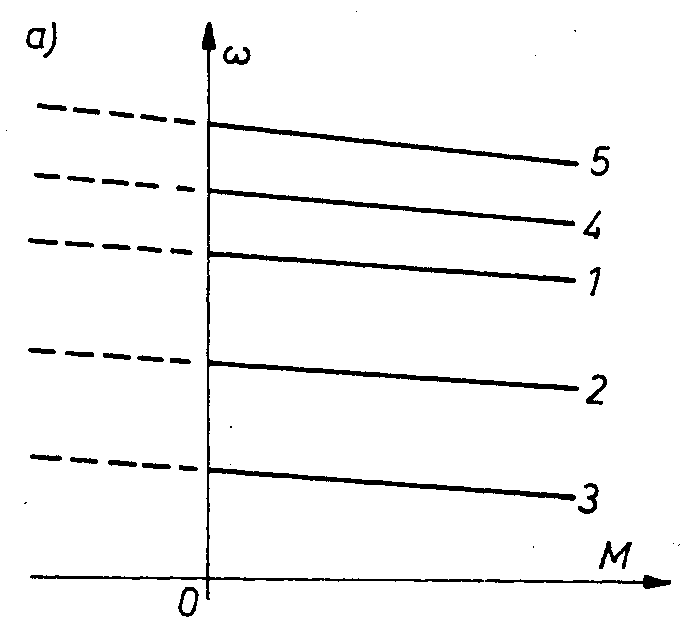
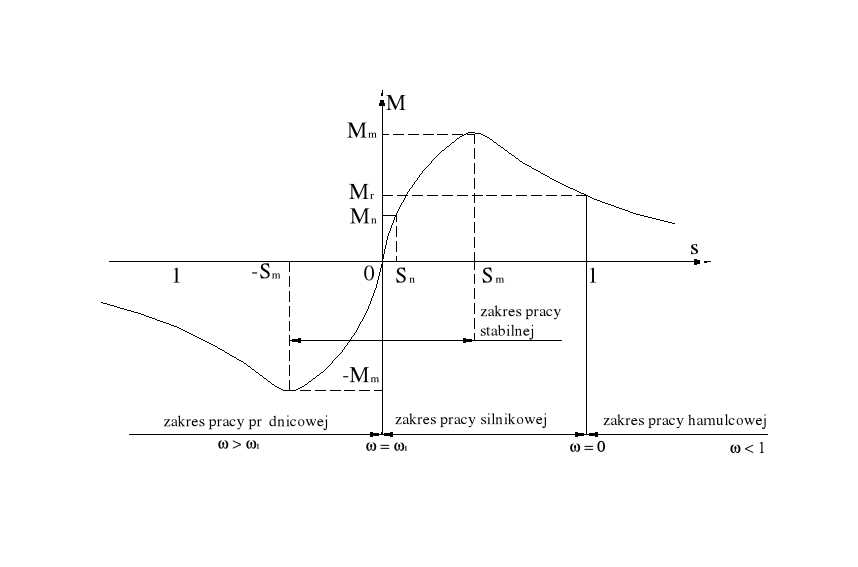
28. Charakterystyka mechaniczna trójfazowej maszyny indukcyjnej. [Rys. 3.16.]
Charakterystyki mechaniczne M = f(ω), związane ze zmianami U1 , f oraz rezystancji rozruchowej Rd (rezystorów dołączanych z zewnątrz do wirnika).

Uproszczony wzór Klossa, dla pełnego zakresu pracy maszyny indukcyjnej (silnikowej, prądnicowej i hamulcowej).
29. Rozruch trójfazowych silników indukcyjnych (pierścieniowych i klatkowych).
![]()
Prąd pobierany podczas rozruchu ze zwartym uzwojeniem wirnika jest kilkukrotnie większy od prądu znamionowego (Ir = (4÷10)IN). Duży prąd rozruchowy może być groźny dla silnika pod względem skutków cieplnych, mimo, że najczęściej rozruch trwa od kilku do kilkudziesięciu sekund. Ale w przypadku silników dużych, a także często powtarzanych rozruchów niebezpieczeństwo takie może wystąpić. Ze względu na powyższe rozruch bezpośredni, polegający na zasileniu silnika pełnym napięciem znamionowym, można stosować tylko przy silnikach małych. Zależnie od warunków sieciowych, przepisy zakładów energetycznych dopuszczają do rozruchu bezpośredniego silniki o mocach od kilku do kilkunastu, rzadko kilkudziesięciu, kilowatów. Dla silników większych mocy stosuje się różne sposoby poprawy warunków rozruchu silnika. Dąży się do tego, aby w czasie rozruchu:- zmniejszyć prąd rozruchowy, ale jednocześnie (o ile to możliwe) - powiększyć moment rozruchowy.
Można to osiągnąć następującymi metodami: - przez zmianę napięcia zasilania uzwojenia stojana (za pomocą przełącznika gwiazda-trójkąt, autotransformatora lub transformatora), - przez włączenie rezystancji lub reaktancji dodatkowej w obwód wirnika (zastosowanie tzw. rozrusznika tylko w silnikach pierścieniowych), - przez włączenie rezystancji lub reaktancji dodatkowej w obwód stojana, - przez zmianę częstotliwości napięcia zasilającego uzwojenie stojana.
30. Regulacja prędkości trójfazowych silników indukcyjnych.
f - częstotliwość p - liczba par biegunów, s - poślizg,
ω - prędkość kątowa wirnika
Regulację prędkości kątowej wirnika można realizować poprzez zmiany częstotliwości, liczby par biegunów i poślizgu. Dla zachowania niezmiennej momentu maksymalnego Mn, zmianom częstotliwości muszą towarzyszyć proporcjonalne do nich zmiany napięcia stojana.
Poprzez zmiany liczby par biegunów można uzyskać skokowe zmiany prędkości. Ten typ regulacji jest stosowany do silników klatkowych (dwu i wielobiegowych) z odpowiednio zmienianym układem połączeń uzwojenia stojana.
Przy zmianach napięcia stojana zmienia się moment maksymalny a poślizg krytyczny nie ulega zmianie: regulacja prędkości może, więc się odbywać w zakresie zmian poślizgu od znamionowego do krytycznego. Ten sposób regulacji stosuje się do silników klatkowych ze zwiększonym poślizgiem krytycznym.
31. Hamowanie trójfazowymi silnikami indukcyjnymi (prądnicowe, przeciwprądem, dynamiczne)
Hamowanie prądnicowe może zachodzić, jeżeli wirnik jest napędzany z zewnątrz a maszyna wytwarza ujemny moment elektromagnetyczny, co jest równoważne z oddawaniem energii do sieci.
Hamowanie przeciwprądowe polega na przełączeniu na przeciwny kierunek wirowania. Obrotowemu ruchowi wirnika przeciwstawia się wirujące w kierunku przeciwnym pole elektromagnetyczne powodując zmniejszenie prędkości
Hamowanie dynamiczne może się odbywać w dowolnym przedziale prędkości. Uzwojenie stojana jest wtedy zasilane prądem stałym o odpowiedniej wartości i w układzie zapewniającym dodawanie się przepływów uzwojeń fazowych. Przy prędkości równej zeru moment hamujący jest równy zeru, co powoduje, że końcowa faza hamowania dynamicznego jest łagodna i nie zawsze można osiągnąć całkowite zatrzymanie.
32. Własności indukcyjnych silników liniowych
Początkowa siła rozruchowa silnika liniowego zazwyczaj niewiele się różni od siły maksymalnej. Prędkość silnika liniowego można regulować napięciowo. Przy hamowaniu z przełączonym silnikiem na przeciwny bieg pola - można także regulować napięciowo siłę hamowania. Część wtórna silnika liniowego ma dobre warunki chłodzenia, toteż wydzielająca się z niej znaczna moc poślizgu nie jest groźna pod względem cieplnym.
33.Budowa i własności indukcyjnych silników jednofazowych.
Silniki indukcyjne jednofazowe są przystosowane do współpracy z siecią jednofazową napięcia przemiennego.
W stojanie jest umieszczone uzwojenie wykonane jako skupione lub jako rozłożone, natomiast wirnik na ogół jest klatkowy. Prąd przemienny doprowadzony do jednofazowego uzwojenia stojana wytwarza pole magnetyczne zmienne nieruchome w przestrzeni, które można rozłożyć na dwa pola kołowe wirujące w przeciwnych kierunkach. Te dwa pola magnetyczne składowe indukują w uzwojeniu klatkowym wirnika siły elektromotoryczne. Pod ich wpływem w uzwojeniach tych płyną prądy. Stąd wniosek, że klatka wirnika wytworzy również dwa pola magnetyczne wirujące w przeciwnych kierunkach. Na skutek oddziaływań pól magnetycznych stojana i wirnika wytworzone zostaną dwa momenty elektromagnetyczne. Silnik indukcyjny jednofazowy nie wytwarza początkowego momentu rozruchowego oraz nie ma określonego kierunku wirowania. Silnik można uruchomić w obu kierunkach przez mechaniczne nadanie wirnikowi początkowej prędkości, przy której moment elektromagnetyczny rozwijany przez silnik jest nieco większy od momentu mechanicznego obciążającego wirnik. Brak momentu rozruchowego jest podstawową wadą silnika indukcyjnego jednofazowego.
34. Straty mocy w silnikach indukcyjnych trójfazowych i jedno fazowych.
![]()
![]()
Silnik indukcyjny pobiera z sieci zasilającej moc czynną Pin. Część mocy pobieranej jest zużywana na pokrycie strat mocy czynnej w uzwojeniu stojana ΔPCu1 oraz strat mocy czynnej w rdzeniu stojana ΔPFe1, reszta jest przekazywana do wirnika jako moc idealna (moc pola magnetycznego wirującego) Pψ. część tej mocy z kolei pokrywa straty w stali wirnika ΔPFe2 (które są bardzo małe i najczęściej się je pomija oraz straty w uzwojeniu wirnika ΔPCu2. Część pozostałej mocy pola magnetycznego wirującego P2 wydziela się na rezystancji zewnętrznej przyłączonej do uzwojenia wirnika, reszta jest przekazywana na wał wirnika jako moc mechaniczna Pm. Moc użyteczna P silnika jest mniejsza od mocy mechanicznej o straty mechaniczne (tarcie) ΔPm.
Sprawnością silnika nazywa się stosunek mocy użytecznej na wale silnika do mocy pobranej z sieci: η=P/Pin
Sprawność silnika nie jest stała i zmienia się wraz ze zmianą obciążenia. Sprawność jest maksymalna wówczas, gdy straty zmienne (obciążeniowe) są równe stratom stałym, czyli jałowym.
35. Budowa maszyn synchronicznych trójfazowych
W stojanie tej maszyny jest umieszczone symetryczne uzwojenie trójfazowe, natomiast jej wirnik - to elektromagnes prądu stałego o biegunach wydatnych (maszyna jednobiegunowa) albo utajonych (maszyna cylindryczna). Przy pracy ustalonej wirnik i pole magnetyczne stojana wirują z tą samą prędkością.
36. Maszyna synchroniczna jako źródło mocy biernej indukcyjnej.
Aby ograniczyć ujemne skutki przesyłu mocy biernej (ograniczenie przesyłu mocy czynnej) dąży się do ograniczenia jej poboru z sieci poprzez poprawny dobór urządzeń odbiorczych oraz instalowanie dodatkowych odbiorników pojemnościowych. Do tego celu mogą służyć maszyny synchroniczne przewzbudne (kompensatory wirujące). Zapotrzebowanie na moc bierną (prawie polowa jej to straty występujące w sieci) zmienia się wraz ze zmianami obciążenia sieci mocą czynną. Z tego względu kompensatory poprzeczne wyposaża się w regulatory współczynnika mocy.
37. Zadania pełnione przez poszczególne elementy maszyny prądu stałego.
Pola magnetyczne stojana i wirnika są stałe i nieruchome, przy tym - dla uzyskania dużego momentu elektromagnetycznego - przesunięte względem siebie o kąt elektryczny π/2. Osiąga się to przez działanie ruchomego zestyku komutator szczotki. Istota leży w zapewnieniu przeciwnego zwrotu prądu w czynnych bokach uzwojenia twornika położonych na przeciwnych stronach - stykających się ze szczotką - wycinków komutatora. Szczotki przylegające do sąsiednich wycinków komutatora zwierają zezwoje, których końce są dołączone do tych wycinków. Zwierane zezwoje powinny znajdować się w strefie neutralnej (indukcja równa zeru), aby nie indukowały się w nich napięcia.
W czasie przemieszczania się wycinków komutatora pod szczotkami, w zwieranych zezwojach ulega zmianie zwrot prądu.
38. Oddziaływanie twornika w maszynie prądu stałego.
Twornik-czyli wirnik. Przepływ twornika powoduje zniekształcenie pola w maszynie. Zjawisko to określa się jako oddziaływanie twornika. Skutki oddziaływania twornika (strumienia poprzecznego) są następujące:
-przesuniecie strefy centralnej, a stąd gorsza komutacja,
-odmagnesowania jednej połówki i domagnesowanie drugiej połówki nabiegunnika, a stąd wzrost maksymalnego napięcia między wycinkami komutatora oraz zmniejszenie SEM twornika (w wyniku nasycenia magnetycznego jednej połówki nabiegunnika)
-wzrost strat w żelazie wirnika.
39. Warunki samowzbudzenia prądnicy bocznikowej.
Prądnice bocznikowe, szeregowo-bocznikowe i szeregowe są nazywane samowzbudnymi, ponieważ ich normalną pracę poprzedza proces samowzbudzenia. Zapoczątkowanie tego procesu uwarunkowane jest istnieniem magnetyzmu początkowego, a jego dalszy, prawidłowy przebieg wymaga właściwego przyłączenia końcówek uzwojenia wzbudzającego, aby strumień pochodzący od prądu wzbudzającego miał ten sam zwrot, co strumień szczątkowy. Z uzwojeniem wzbudzającym bocznikowym nie może też być połączona szeregowo zbyt duża rezystancja dodatkowa.
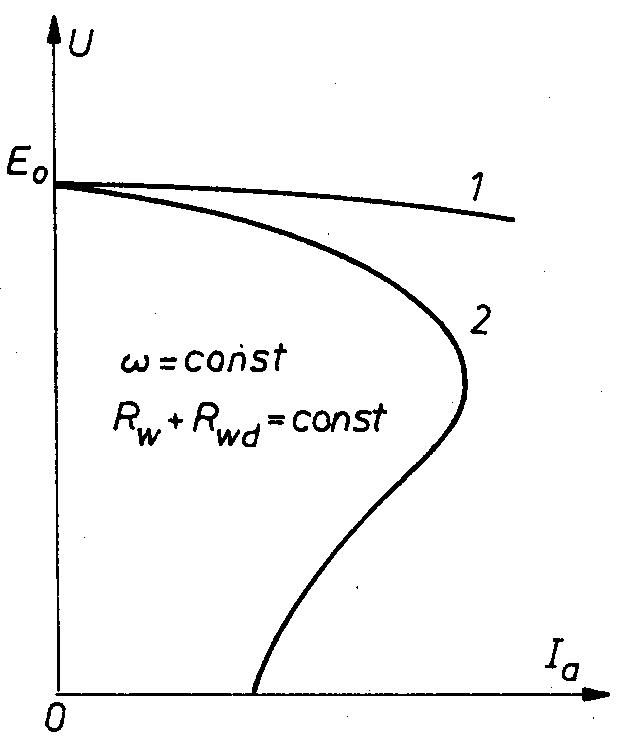
40. Charakterystyki zewnętrzne prądnic prądu stałego (obcowzbudnych i bocznikowych)
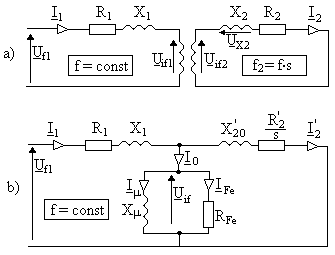
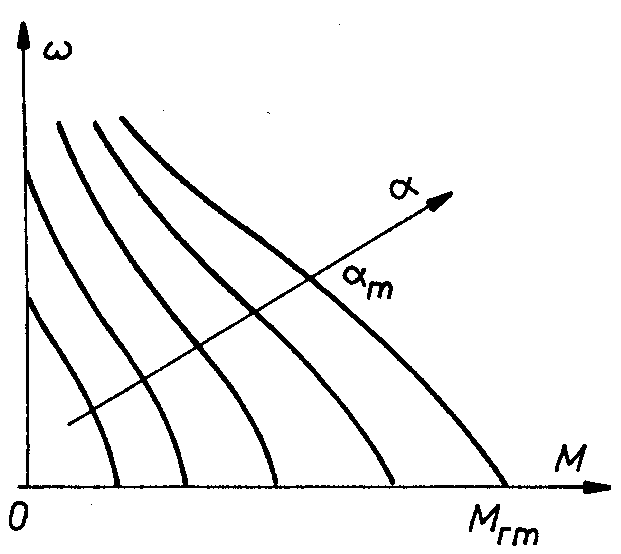
Podstawową charakterystyka prądnic jest charakterystyka zewnętrzna U=f(Ia), U=E-RaIa, E=E0-E, gdzie: E0-SEMw stanie jałowym, E-zmiana SEM spowodowana oddziaływaniem twornika oraz zmianą prądu wzbudzenia (w prądnicy bocznikowej efekt spadku napięcia na rezystancji Ra)
Wpływ rezystancji dodatkowej Rwd, dołączonej do uzwojenia wzbudzającego prądnicy bocznikowej, na sem w stanie jałowym.
Charakterystyki zewnętrzne prądnic: 1-obcowzbudnej, bocznikowej (o równych sem w stanie jałowym
41.
41.Charakterystyki mechaniczne silników prądu stałego (obcowzbudnych, bocznikowych i szeregowych).
Charakterystyka mechaniczna =f(U). Istotne znaczenie też mają zależności =f(Ia) i M= f(Ia). Analitycznie w postaci uproszczonej uzyskuje się te zależności na podstawie wzorów: E=C, M=CIa, i równania obwodu twornika U=E+(Ra+Rws+Rad); gdzie: U-napięcie sieci, E-napięcie indukowane (sem) twornika, Rws-rezystancja szeregowego uzwojenia wzbudzającego (w silniku szeregowym), Red-dodatkowa rezystancja w obwodzie twornika.
W przypadku silnika bocznikowego szukane zależności można zapisać następująco:
W przypadku silnika szeregowego przyjmuje się proporcjonalność strumienia wzbudzającego do prądu twornika, z czego wynikają zależności: M=C1Ia2
Przy czym wartość C1 zależy od stopnia osłabienia wzbudzenia, związanego z wartością rezystancji bocznikowej uzwojenia wzbudzającego.
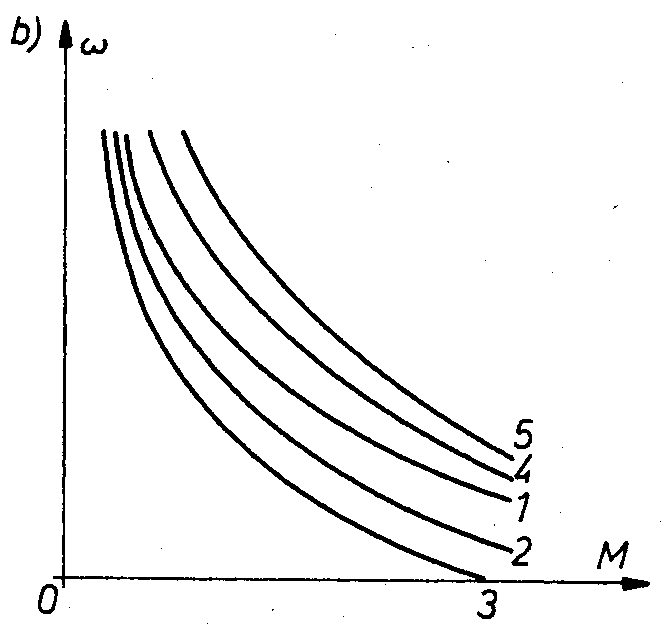
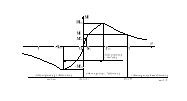
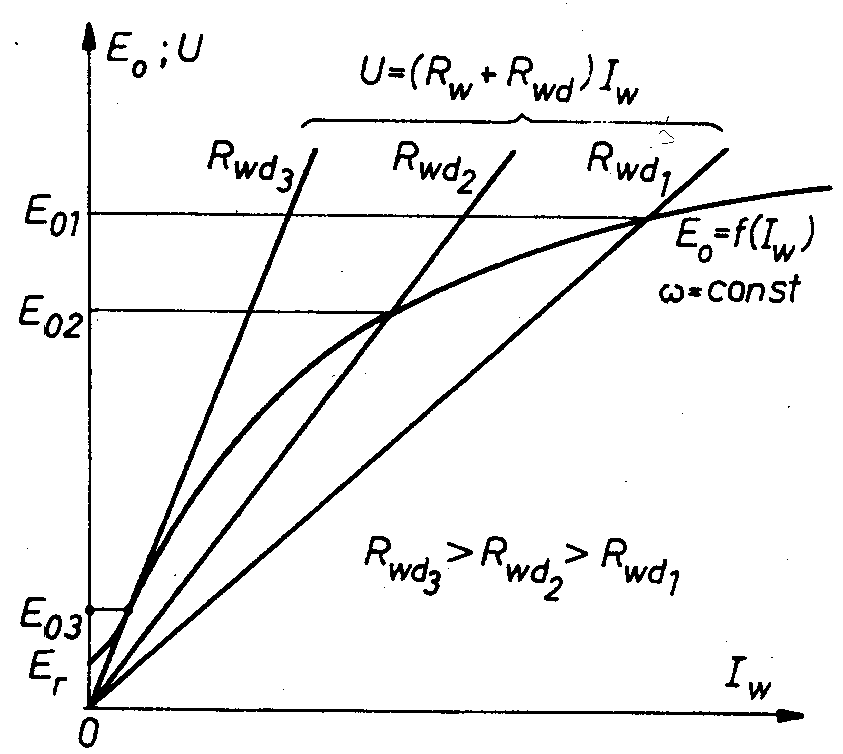
3.42.Charakterystyki mechaniczne silników prądu stałego, obcowzbudnych(a-1,2,3,4,5) i bocznikowych(a-1,4,5) oraz szeregowych (b) 1-naturalne; 2,3-przy obniżonym napięciu Ua2<Ua2<Ua1; 4i5-przy osłabionym wzbudzeniu <<=1 gdzie =Iw/Iw1 (w silniku szeregowym Iw1=Ia)
42.Regulacja prędkości silników prądu stałego.
Prędkość silników prądu stałego można zmieniać poprzez zmiany napięcia zasilającego, strumienia wzbudzającego lub rezystancji dodatkowej w obwodzie twornika.
43.Hamowanie silnikami prądu stałego (prądnicowe, przeciwprądem, dynamiczne).
Rozróżnia się hamowanie prądnicowe, przeciwprądem i dynamiczne. Linie przerywane: wszystkie na rysunku 3.42a, dotyczą hamowania prądnicowego. Pozostałe linie przerywane na rysunku 3.43a,b dotyczą: 3',4',3i4 (przedłużenie ciągłych, przy zmianie znaku)-hamowania przeciwprądem; 5,6i7-hamowania dynamicznego. Silnik szeregowy może być hamowany prądnicowo tylko wówczas, gdy jego uzwojenie wzbudzające jest zasilane w układzie obcowzbudnym lub bocznikowym.
44.Rozruch silników prądu stałego.
Wartość rezystancji rozruchowej zmienia się skokowo, prąd twornika w chwilach połączenia rezystorów zmienia się, więc również skokowo (pomijając indukcyjność obrotu twornika). Płynną regulację prądu przy rozruchu i hamowaniu silników można uzyskać stosując układy energoelektroniczne (przekształtniki tyrystorowe) straty energii przy stosowaniu tych układów są wielokrotnie mniejsze niż w układach klasycznych (resystorowych).
45.Straty mocy w maszynach prądu stałego.
W samej maszynie prądu stałego występują straty mocy w obwodzie twornika (obciążeniowe), w uzwojeniu bocznikowym lub obcowzbudnym (wzbudzenia), w żelazie wirnika i mechaniczne.
46.Charakterystyki mechaniczne silników komutatorowych jednofazowych (szeregowych i repulsyjnych).
Rodzina charakterystyk mechanicznych silnika repulsyjnego z kątem ustawienia szczotek jako parametrem.
47. Charakterystyki statyczne i dynamiczne łuku elektrycznego
W chwili rozłączenia się mikropowierzchni styków między najbliżej położonymi wierzchołkami nierówności występuje bardzo silne pole elektryczne. Inicjuje ono jonizację zderzeniową w parach metali, które-jak wiadomo- charakteryzuje niski potęcjał jonizacyjny.
Proces jonizacji przechodzi wnet w lawinowy i obejmując całą przestrzeń międzystykową, doprowadza do zapalenia krótkiego łuku między stykami. Zazwyczaj, wraz z oddalaniem się styków (na odległość paru mm), łuk krótki przechodzi w łuk długi i wówczas dopiero podlega gaszeniu.
Kanał łukowy składa się ze stref przyelektrodowych, kolumny łukowej i stref przejściowych między strefami przyelektrodowymi a kolumną łukową. W strefie przejściowej, przy granicy ze strefą katodową, można jeszcze wyróżnić strefę jonizacji. Średnica kolumny łukowej jest rzędu kilku mm; w sferach przejściowych kanał ulega przewężeniu, osiągając w pobliżu elektrod średnice rzędu ułamków mm(plamka katodowa i anodowa)
Koncentracja ładunków w kanale łukowym nie jest równomierna. W strefie katodowej występuje przewaga ładunków (jonów) dodatnich, a w anodowej - ładunków ujemnych (elektronów). Efektem tego są bardzo silne pola elektryczne w pobliżu elektrod oraz bardzo duże spadki napięć:katodowy 8-20V, anodowy 2-6V. Ruch cząsteczek naładowanych zostaje, więc w strefach przyelektrodowych silnie przyspieszony. Duże prędkości, uzyskiwane przez elektrony w strefie anodowej, zwiększają intensywność tworzenia jonów, które są niezbędne do podtrzymania wyładowania w kolumnie łukowej. Podgrzewanie katody przez padające na nią jony oraz anody-przez wchodzące w nią elektrony wywołuje przy tym parowanie materiału elektrod, dostarczając cząstek obojętnych - podlegających następnie jonizacji.
Jony docierające, więc do katody powstają głównie w jej pobliżu - w strefie jonizacji. Dochodzi tu do zderzeń cząstek obojętnych z wyemitowanymi przez katodę elektronami i z odbitymi od katody zneutralizowanymi jonami. Zjawisko powrotu zdejonizowanych przy katodzie cząstek do strefy jonizacji występuje przy dużych mocach wyładowania. Zwiększony dzięki temu prąd jonowy w strefie katodowej zapewnia odpowiednią emisyjność i pokrycie strat cieplnych katody. Ze wzrostem intensywności odbioru ciepła wzrasta gęstość prądu i temperatura kolumny łukowej, a maleje średnica. Efekt wzrostu temperatury przy zwiększonym chłodzeniu określa się mianem paradoksem łuku elektrycznego.
48. Pojęcie prądu ograniczonego.
Największą wartość prądu wyłączeniowego bezpiecznika lub wyłącznika ograniczającego nazywamy jego prądem ograniczonym.
49. Przepięcia stwarzane przez napięcie łuku podczas wyłączania zwarć o obwodach prądu przemiennego.
Największe problemy w pracy łączników zestykowych stwarza gaszenie łuków przy wyłączaniu prądów.
Na zapalenie się łuku elektrycznego między rozchodzącymi się stykami łączników składa się ciąg, szybko następujących po sobie zjawisk. Osłabienie siły docisku styków (poprzedzające wystąpienie przerwy między nimi) powoduje zwiększenie rezystancji zestykowej, a wraz z nią - ciepła wydzielanego przez prąd w miejscach styczności.
W czasie wyłączania prądu przez niektóre bezpieczniki zestkowe, kanał łukowy wydłuża się, przez co zwiększa się intensywność odbioru ciepła. Przy niskich napięciach korzystnie jest „rozbić” łuk na kilka łuków krótszych, aby poprawić warunki odbioru ciepła i wykorzystać znaczne, przyelektrodowe spadki napięcia każdego z tych łuków.
Im lepsze są własności dielektryczne, gaszeniowe i cieplne środowiska, tym odległość rozchodzenia się styków w wyłączniku może być mniejsza. Małymi przerwami międzystykowymi charakteryzują się wyłączniki próżniowe.
Przy wyłączaniu prądu w obwodach zasilanych napięciem przemiennym, najkorzystniejsze warunki gaszenia łuku elektrycznego występują w chwilach naturalnego osiągania przez prąd wartości zerowych. Kanał połukowy musi zostać szybko zdejonizowany, aby nie nastąpił ponowny zapłon po wpływem napięcia między elektrodami (stykami). Dzieje się to tym prędzej, im mniejsza jest koncentracja ładunków w przestrzeni międzyelektronowej i im szybciej są one odprowadzane z kanału połukowego- przy zachowaniu jego ciągłości, a im szybciej powiększa się odstęp części zjonizowanych kanału - w przypadku jego przerwania przez czynnik chłodzący. Ponowne zapłony łuku mogą mieć charakter cieplny (jonizacja termiczna) lub elektryczny (jonizacja zderzeniowa.
Przebieg czasowy napięcia pojawiającego się między zaciskami łącznika lub bezpiecznika po wyłączeniu prądu łuku zależy od parametrów obwodu w części zasilającej i odbiorczej. Pojemności elementów obwodu (przewodów, uzwojeń maszyn i transformatorów), które w normalnych stanach pracy układu nie odgrywają prawie żadnej roli mogą ładować się oscylacyjnie po włączeniu prądu łuku, wywołując w ten sposób przepięcia w różnych częściach obwodu, w tym również na zaciskach wyłącznika (bezpiecznika).
50. Przepięcia występujące w chwili zgaśnięcia łuku w obwodach prądu stałego.
Ze względu na konieczność ograniczenia przepięcia na łączniku, charakterystyki łuku wyłączeniowego prądu stałego powinny być możliwie płaskie. Znaczy to, że odbiór ciepła z łuku przy małych prądach musi być mniej intensywny niż przy dużych. Wymagania te spełnia odpowiednio skonstruowany układ gaszeniowy z różkami i komorami łukowymi.
W przypadku włączenia dużego prądu zwarciowego przez bezpiecznik topnikowy, następuje gwałtowny rozpad topnika na wiele części i w pierwszej chwili przepięcie jest znacznie wyższe, niż w chwili zgaśnięcia łuku.
Oprócz energii dostarczonej ze źródła pomniejszonej o energię wydzieloną na rezystancji R, w łuku wydziela się, więc cała energia pola magnetycznego związana z prądem i1, płynącym w obwodzie w chwili zapłonu łuku t1.
Indukcyjność obwodu wpływa zwykle na zwiększenie czasu łukowego t2-t1. Zwolnienie procesu gaszenia łuku powoduje, że charakterystyka dynamiczna staje się bardziej stroma (bliższa statycznej), wzrasta, więc przepięcie w chwili zgaśnięcia łuku.
51. Przebiegi prądu zwarciowego w obwodach zasilanych prądem stałym oraz sinusoidalnym.
Przebieg czasowy napięcia pojawiającego się między zaciskami łącznika lub bezpiecznika po wyłączeniu prądu łuku zależy od parametrów obwodu w części zasilającej i odbiorczej. Pojemności elementów obwodu (przewodów, uzwojeń maszyn i transformatorów), które w normalnych stanach pracy układu nie odgrywają prawie żadnej roli mogą ładować się oscylacyjnie po włączeniu prądu łuku, wywołując w ten sposób przepięcia w różnych częściach obwodu, w tym również na zaciskach wyłącznika (bezpiecznika).
Po wyłączeniu zwarcia w obwodzie prądu przemiennego, na zaciskach łącznika (bezpiecznika) może wystąpić krótkotrwałe napięcie rzędu 1,5-1,7 amplitudy napięcia roboczego. Wyższe wartości chwilowe napięcia na zaciskach łącznika lub odbiornika, przekraczające nawet 6-krotnie amplitudę napięcia roboczego, mogą wystąpić w skutek „ucinania” prądu przy wyłączeniu małych prądów indukcyjnych.
Wyłączenie zwarć w obwodach prądu stałego, podobnie jak przy prądzie przemiennym, może przebiegać z ograniczeniem lub bez ograniczenia prądu. Ograniczenie narastania prądu zwarciowego występuje w bezpiecznikach topnikowych i wyłącznikach ograniczających prądu stałego, zwanych wyłącznikami szybkimi.
Oczywiście, wyłączenie prądów roboczych przebiega podobnie do wyłączenia ustalonych prądów zwarciowych z tą tylko różnicą, że ustalony prąd roboczy Iu jest dużo mniejszy od ustalonego prądu zwarciowego Izw.
52. Rodzaje zwarć w obwodach trójfazowych. Łączniki zestykowi Bezpieczniki topikowe ???
53. Prąd początkowy i związane z nim parametry przebiegu prądu zwarciowego. ???
54. Dobór aparatów łączeniowych i zabezpieczeniowych do warunków zwarciowych.
Im lepsze są własności dielektryczne, gaszeniowe i cieplne środowiska, tym odległość rozchodzenia się styków w wyłączniku może być mniejsza. Małymi przerwami międzystykowymi charakteryzują się wyłączniki próżniowe.
Pojemności elementów obwodu (przewodów, uzwojeń maszyn i transformatorów), które w normalnych stanach pracy układu nie odgrywają prawie żadnej roli mogą ładować się oscylacyjnie po włączeniu prądu łuku, wywołując w ten sposób przepięcia w różnych częściach obwodu, w tym również na zaciskach wyłącznika (bezpiecznika).
Przykładem odbiorów pobierających małe prądy indukcyjne są cewki styczników oraz nieobciążone transformatory.
55. Zabezpieczenia przeciążeniowe, zwarciowe i zanikowe w obwodach odbiorczych niskiego napięcia.
W czasie wyłączania prądu przez niektóre bezpieczniki zestkowe, kanał łukowy wydłuża się, przez co zwiększa się intensywność odbioru ciepła. Przy niskich napięciach korzystnie jest „rozbić” łuk na kilka łuków krótszych, aby poprawić warunki odbioru ciepła i wykorzystać znaczne, przyelektrodowe spadki napięcia każdego z tych łuków.
Zastępczy obwód zasilania odbiornika o charakterze indukcyjnym
Po rozejściu się styków łącznika W chwili to pojawia się między nimi łuk elektryczny. Wzrost napięcia łuku przy malejącym prądzie wpływa na szybkość zmian prądów i oraz ic, powoduje zgaszenie łuku i „ucięcie” prądu w chwili t1.Obwód rozdziela się odtąd na dwa obwody oscylacyjne ze źródłem napięcia i bez źródła napięcia. Łucyk „Zasady energoelektryki 57-75str
56. Udar napięciowy (prądowy)- To wykres w funkcji czasu przedstawiający prądy piorunów oraz pochodzące od nich prądy i napięcia w liniach elektroenergetycznych także niektóre z krótko trwałych przepięć wewnętrznych Udar składa się z czoła- od punktu O do W i grzbietu-od W do zaniku.
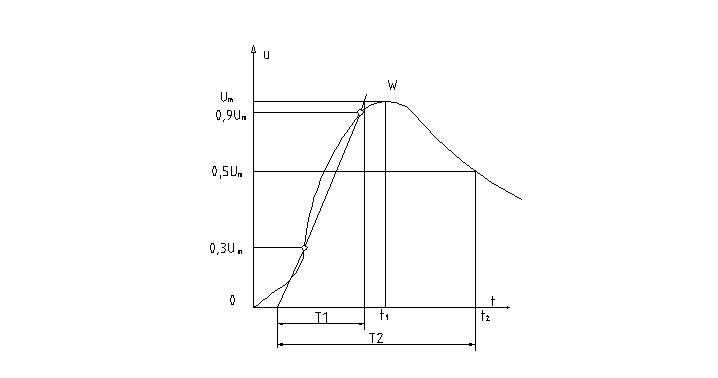
Udar charakteryzowany jest umownie swą wartość szczytową(napięciowy przez Um; prądowy przez Im),czas trwania czoła T1;czas do półszczytuT2. Udary prądu głównego wyładowania pioruna charakteryzują wartości szczytowe rzędu 5-250kA, czasy trwania czoła 1- 10μs,czasy do półszczytu 10-200 μs.
57. Ochronniki służą do ochrony izolacji przed przepieciami. Obniżają one napięcie między linią i ziemią do poziomu bezpiecznego, 0odprowadzając-poprzez łuk elektryczny na iskiernikach-ładunek fali przepięciowej z przewodów roboczych do ziemi.
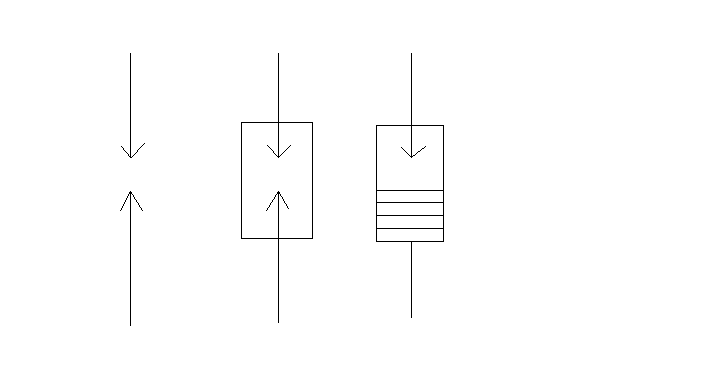
1.iskiernik ochronny 2.Odgromnik wydmuchowy 3. Odgromnik zaworowy
58..]Zasady ochrony przepięciowej i od- gromowej. Przepięcia pochodzenia atmosferycznego stanowią największe zagrożenie dla izolacji urządzeń.Ochronaod przepięć atmosfer. Nosi nazwę ochr.Odgromowej.Stawia się przed nią 2 zad:1.Osłaniania przewodów roboczych linii
Lub aparatów i budynków stacji energoelektrycznych przed bezpośrednimi uderzeniami piorunów oraz niedopuszczania do tzw. przeskoków odwrotnych-lub iskier odwrotnych lub wtórnych 2.łagodzenia skutków uderzeń piorunów lub niedopuszczenia do uszkodzenia obiektów z tego powodu. Ochronę linii i stacji energoelektrycznych przed bezpośrednimi uderzenia-
Mi piorunów zapewniają zwody piorunowe wraz ze stalowymi elementami konstrukcji słupów i przewodami.
Przewody robocze linii energoelektr. Chroni się umieszczając nad nimi przewody odgromowe, które są uziemione na każdym słupie. Stacje elektroen. Chronione są za pomocą uziemionych zwodów pionowych lub poziomych.
59.Czynniki wpływające na reakcję organizmu ludzkiego przy przepływie prądu porażeniowego:1.Częstotliwość prądu wrażeniowego 2.Natężenie prądu raż. 3.Droga przepływu prądu raż. 4.Czas rażenia 5.Indywidualne cechy biologiczne organizmu 6.Psychiczne przygotowanie osobnika na możliwość porażenia Najmniejszą odporność wykazuje organizm ludzki na prądy o częstliwosciach 15-100 Hz,w którym to zakresie mieszczą się częstotliwości sieciowe.60. Ochrona przeciwporażeniowa pod-stawowa i dodatkowa. Ochrona podstawowa(ochrona przed dotykiem bezpośrednim)to zespół środków zapobiegających niebezpiecznym skutkom dotknięcia przez człowieka części czynnych, tzn. żył, przewodów lub innych części przewodzących prąd elek. Znajdujących się podczas normalnej pracy pod napięciem w tym także przewód neutralny. W tym celu należy zastosować izolację roboczą, osłony, bariery i ogrodzenia przenośne lub umieścić części czynne poza zasięgiem ręki. Ochrona dodatkowa(przed dotykiem pośrednim)stanowi ochronę zapobiegającą niebezpiecznym skutkom dotknięcia części przewodzących dostępnych w razie pojawienia się na nich napięcia w warunkach zakłóceniowych. Najskuteczniejszym zabezpieczeniem przed porażeniem jest przystosowanie urządzeń elektr. do zasilania z bezpiecznych źródeł o napięciu roboczym nieprzekraczającym napięcia bezpiecznego UL.
61. Zakresy napięciowe i układy sieciowe instalacji elektrycznych. Ze względu na ochronę porażeniową w obiektach budowlanych określono 2 zakresy napięciowe: zakres I (napięć b.niskich) obejmuje napięcia do 50V prądu przemiennego i do 120V prądu prądu stałego. Dzieli się przy tym na 3 podzakresy wyznaczone przez wartości graniczne:50,25 i 12V przy prądzie przemiennym oraz 120,60 i 30V przy prądzie stałym. Zakres II(na pięć powszechnie stosowanych)obejmuje napięcia od 50 do 1000V-przy prądzie przemiennym oraz od 120 do 1500V przy prądzie stałym obwodach uziemionych obowiązuje dodatkowo ograniczenie napięć przemiennych między fa-zami i ziemią do 600V oraz napięć stałych między biegunami i ziemią do 900V
62. Sposoby i środki ochrony przeciwporażeniowej w obiektach budowlanych. Do realizacji ochrony przed dotykiem bezpośrednim w obiektach budowlanych używa się sposobów: uniemożliwienie przepływu prądu elektrycznego przez ciało człowieka lub zwierzęcia - ograniczenie prądu, który może przepływać przez ciało człowieka lub zwierzęcia do wartości bezpiecznej Do realizacji ochrony przed dotykiem pośrednim w obiekt. bud. Są sposoby:- uniemożliwienie przepływu przez ciało człowieka lub zwierzęcia prądu elekt.
Mogącego pojawić się w wyniku uszkodzeń instalacji lub urządzeń -ograniczenie prądu,który może przepływać przez..(Jw.)..w wyniku uszkodzeń instalacji lub urządzeń do wartości bezp-samoczynne odłączenie zasilania w określonym,krótkim czasie w wypadku
Uszkodzeń instalacji lub urządzeń, powodujących możliwość przepływu prądu przez ciało człowieka lub zwierzęcia, gdy wartość tego prądu może być równa lub większa od wartości bezpiecznej powszechne stosowanie ekwipotencjalizacji (wyrównania potencjałów części przewodzących dostępnych i obcych)dla wzmocnienia skuteczności istniejącej ochrony przed dotykiem pośrednim Do realizacji ochrony przed dotykiem bezpośrednim w obiektach bud. Służą środki:- izolowanie części czynnych lub umieszczanie ich poza zasięgiem ręki
-użycie ogrodzenia, obudowy lub bariery, ewentualnie dodatkowe urządzenia ochronne różnicowo-prądowe o paradzie zadziałania nie większym niż 30mA Do realizacji ochrony przed dotykiem pośrednim w obiekt. Służą środki: szybkie wyłączanie zwarć w układach sieciowych TN,TT i IT wraz z ograniczeniem wartości napięcia dotykowego, za pomocą połączeń wyrównawczych miejscowych -stosowanie urządzeń II klasy ochronności lub o izolacji równoważnej -izolowanie stanowiska separacja odbiorników -stosowanie
Nieuziemionych połączeń wyrównawczych miejscowych.
63. Skuteczność ochrony przeciwporażeniowej w obiektach budowlanych. Skuteczność.(...).Zapewnia szybkie wyłączanie w układach sieciowych TN,TT i IT wraz z ograniczeniem wartości napięcia dotykowego w układach sieciowych TT i IT. Szybkie wyłączanie zwarć w
Układach sieciowych TN,TT i IT jest realizowane przez: -urządzenia ochronne przetężeniowe -urządzenia ochronne różnicowo-prądowe.
64.Ochrona przeciwporażeniowa przy urządzeniach średniego i wysokiego napięcia. Ochrona podstawowa przy urządzeniach elektroenergetycznych o napięciu znamionowym wyższym niż 1kV ma zapobiegać zetknięciu się człowieka z częściami czynnymi tego urządzenia, natomiast ochrona przeciwporażeniowa dodatkowa-wystąpieniu wyższych niż dopuszczalne napięć rażeniowych dotykowych, które mogą powstaną skutek pojawienia się napięcia na przewodzących częściach nienależących do obaw. elektor. Przy urządzeniach tych, w razie konieczności zapewnienia ochrony przeciwporażeniowej dodatkowej wykonuje się uziemienia ochronne. W przypadkach technicznie uzasadnionych dla zmniejszenia zagrożenia porażeniowego, można też stosować-łącznie z uziemieniem ochronnym-uzupełniające środki ochrony przeciwporażeniowej dodatkowej w postaci: 1.Izolacji stanowisk 2. Powłok elektroizolacyjnych 3. Wstawek izolacyjnych w elementach przewodzących 4.Ogrodzeń.
![]()
![]()
![]()
Wyszukiwarka