5. METODY PRZESTRZENI STANÓW
Sposoby przejścia między różnymi opisami
Opis obiektu w przestrzeni stanów nie jest jednoznaczny, tj. różne zestawy macierzy A, b, c mogą opisywać obiekt o tych samych własnościach. Powstaje pytanie jak wybrać wektor stanu mając opis obiektu w postaci transmitancji. Istnieje kilka standardowych sposobów przejścia, które pozwalają na uzyskanie tzw. kanonicznych postaci macierzy A, b, c (metoda bezpośrednia, równoległa, iteracyjna). Weźmy obiekt opisany transmitancją :


![]()
, gdzie
![]()
, czyli
![]()
.
Rysujemy schemat blokowy wewnętrznej struktury obiektu pamiętając, że mnożenie przez s-1 oznacza całkowanie.
rn-1
rn-2
...... ....
U(s) E(s) Y(s)
∫ ∫ ... ∫ r0
xn xn-1 x2 x1
-pn-1
-pn-2
.... . . . . .
-p0
Na poszczególne zmienne stanu xi (t) wybieramy wielkości :
![]()
Po przejściu do dziedziny czasu otrzymuje się układ równań różniczkowych :
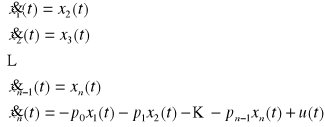
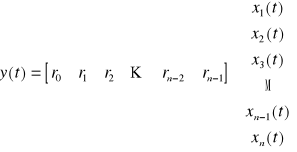
równanie wyjścia :
![]()
Wykorzystując zapis macierzowy :
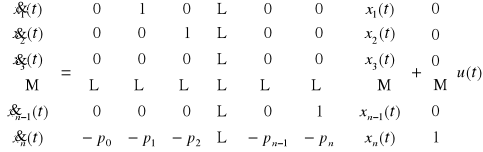
W ten sposób otrzymaliśmy jedną z postaci kanonicznych Brunowsky'ego - Luenbergera macierzy A, b, c. Jest to tzw. postać kanoniczna dla sterowania. Stosując inny tok postępowania można otrzymać tzw. postać kanoniczną dla obserwowania.
; 
![]()
Przejście odwrotne, tzn. z opisu przestrzeni stanów do transmitancji wykonuje się następująco :
![]()
Przejście pomiędzy równaniem różniczkowym a transmitancją wykonuje się za pomocą przekształcenia Laplace'a.
Sterowalność i obserwowalność
W przypadku opisu wektorem stanu, może zdarzyć się tak, że przy dostępnym sterowaniu nie jesteśmy w stanie wpływać na niektóre zmienne. Mówimy wtedy, że te zmienne nie są sterowalne. Analogicznie niektóre zmienne stanu mogą w ogóle nie wpływać na wyjście. Mówimy wtedy, że te zmienne nie są obserwowalne. Ogólnie zmienne stanu można podzielić na cztery kategorie.
x - zmienne stanu
sterowalne
i obserwowalne
niesterowalne y(t)
i obserwowalne
u(t) sterowalne
i nieobserwowalne
niesterowalne
i nieobserwowalne
Pojęcie sterowalności i obserwowalności prześledźmy na przykładzie obiektu jakim jest myślowy model zegara wskazówkowego. Wielkości wejściowe są wprowadzane do obiektu za pomocą pokręteł umieszczonych z tyłu. Wielkościami wyjściowymi jest położenie wskazówek na cyferblacie. Cały mechanizm zegara przetwarza położenie pokręteł na położenie wskazówek. Zmiennymi stanu są sprężyny znajdujące się wewnątrz zegara. Zmienne stanu reprezentują zmagazynowaną w obiekcie energię. Kółka zębate są członami proporcjonalnymi i stanowią fizyczne połączenie pomiędzy wejściem, zmiennymi stanu i wyjściem. Można je interpretować jako współczynniki macierzy. Zmienne stanu są sterowalne, jeżeli kręcąc pokrętłami mamy wpływ na daną sprężynę. Zmienne stanu są obserwowalne, gdy stan danej sprężyny ma wpływ na położenie wskazówek. Sterowalność i obserwowalność zależy od wewnętrznych połączeń w strukturze obiektu. Dla obiektów liniowych wykryto [Kalman] odpowiedni warunek matematyczny, pozwalający testować wewnętrzną strukturę obiektu.
Twierdzenia o sterowalności i obserwowalności
Układ liniowy stacjonarny o jednym wejściu jest sterowalny wtedy i tylko wtedy, gdy rząd macierzy sterowalności Q jest pełny, gdzie
![]()
,
czyli rz Q = n.
W praktyce sprawdza się warunek : czy det Q ≠ 0.
Układ liniowy stacjonarny o jednym wyjściu jest obserwowalny wtedy i tylko wtedy, gdy rząd macierzy obserwowalności N jest pełny.

, czyli rz N = n.
W praktyce sprawdza się warunek det N ≠ 0.
Obiekt zapisany w postaci kanonicznej do sterowania jest w pełni sterowalny. Obiekt zapisany w postaci kanonicznej do obserwowania jest w pełni obserwowalny.
Liniowa transformacja wektora stanu.
Obiekt jest opisany przy pomocy następujących równań stanu :
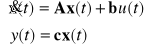
Chcemy by obiekt był opisany przy pomocy innego wektora stanu, zdefiniowanego w sposób następujący :
![]()
gdzie T - macierz transformacji, spełniająca następujące warunki :
dim T = n, co oznacza, że wektory x i v mają ten sam wymiar,
rz T = n ⇔ det T ≠ 0 - macierz jest nieosobliwa
W nowych współrzędnych obiekt jest opisany równaniami :
Transformacja T wektora stanu działa w sposób następujący na trójkę macierzy A, b, c.
![]()
Opis za pomocą wektora stanu nie jest jednoznaczny. Dwa obiekty mają taką samą dynamikę wtedy i tylko wtedy, gdy ich równania charakterystyczne maję te same pierwiastki. Liniowa transformacja wektora stanu nie zmienia położenia pierwiastków równania charakterystycznego.
Cele konstruowania układu regulacji automatycznej
0. Zapewnić stabilność
1. Spełnić wymogi, co do kształtu przebiegu przejściowego.
2. Spełnienie wymogów co do odchyłki statycznej.
3. Zapewnić sterowanie optymalne wg. określonego kryterium.
W punkcie 1. wymogi są określone za pomocą czasu regulacji, odchyłki dynamicznej, konieczności wyeliminowania zakłóceń.
Koncepcja realizacji celu.
Stosujemy proporcjonalne sprzężenie zwrotne od poszczególnych zmiennych stanu. Zakładamy, że wszystkie stany są dostępne pomiarowo.
x1
z(t) x2 y(t)
![]()
. . . . . . c
_ xn
g0
g1
. . . ...
gn
Po wprowadzeniu sprzężenia zwrotnego, nowe sterowanie ma postać :
![]()
, gdzie
![]()
.
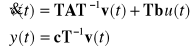
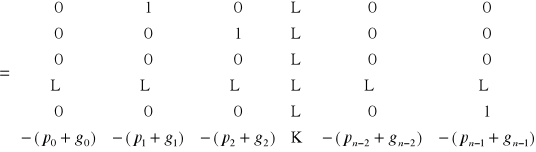
Idąc tym tropem otrzymujemy (dla uproszczenia zapisu pomijamy w zapisie zależność od czasu):
![]()
Wprowadzenie sprzężenia zwrotnego doprowadziło do transformacji T trójki macierzy opisujących obiekt sterowania.
![]()
Sformułowanie zagadnienia
Dane:
1. Własności obiektu sterowania w postaci wektora współczynników wielomianu charakterystycznego :
![]()
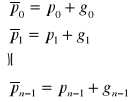
2. Pożądane własności układu regulacji (obiekt z odpowiednim sprzężeniem zwrotnym) - również w postaci wektora współczynników wielomianu charakterystycznego :
![]()
Pożądany wielomian charakterystyczny dobieramy tak, aby były spełnione warunki 0 i 1. Uzyskujemy to przez odpowiednie umiejscowienie biegunów.
3. Macierze A, b są w postaci kanonicznej do sterowania.
Szukane :
Znaleźć taki wektor g , aby układ sterowania miał pożądane własności określone wektorem ![]()
.
Rozwiązanie :
Z jednej strony zachodzi :
Z drugiej strony mamy :

,
zatem otrzymujemy układ równań :
i ostatecznie
![]()
.
Wynik ten jest słuszny, jeżeli macierze A,b,c są w postaci kanonicznej dla sterowania. W przeciwnym przypadku musimy jeszcze dokonać odpowiedniej transformacji liniowej - o czym potem.
Obserwator stanu
Rozważania przeprowadzone wcześniej są słuszne, gdy wszystkie zmienne stanu są dostępne pomiarowo. Często zdarza się jednak tak, że poszczególne zmienne nie są dostępne dla układu regulacji. Wynika to z faktu , że nie jesteśmy w stanie w sposób zadowalający wyznaczać pochodnych wyższych rzędów ze zmierzonych sygnałów. Obserwatory stanu konstruuje się właśnie w celu udostępnienia zmiennych stanu.
Wydawałoby się, że nie ma tu żadnego problemu. Wystarczyłoby działać sygnałem wejściowym u(t) na układ o takich samych własnościach dynamicznych jak obiekt sterowania. Jednakże w praktyce nie znamy warunków początkowych, w jakich znajduje się obiekt. Jak również zakłócenia mogą powodować rozbieżność między rzeczywistymi zmiennymi stanu a ich estymatami generowanymi przez obserwator. Stąd też zachodzi konieczność konstruowania takiego obserwatora, dla którego ta rozbieżność dążyłaby asymptotycznie do zera.
Na początku lat 70-tych Luenberger zaproponował następującą strukturę obserwatora:
u(t) ![]()
c ![]()
x(t) y(t)
![]()
![]()
![]()
. . . . . . . ![]()
Naszym celem jest takie dobranie parametrów obserwatora (tzn. macierzy ![]()
) tak, aby : ![]()
, gdzie ![]()
Odejmując stronami równania dynamiki obiektu i obserwatora otrzymuje się :
![]()
![]()
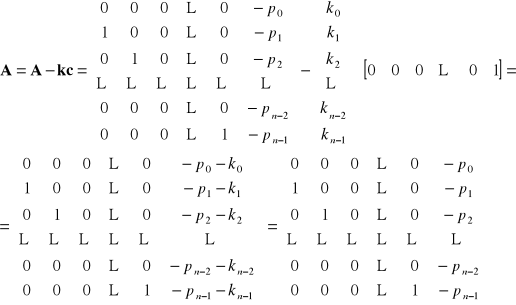
Przyjmujemy, że macierze obserwatora są następujące :
![]()
![]()
czyli : ![]()
Otrzymaliśmy autonomiczny układ dynamiczny ze względu na e(t), którego rozwiązaniem jest (rozwiązanie jednorodnego układu równań różniczkowych) :
![]()
Jeżeli wartości własne macierzy ![]()
leżą w lewej półpłaszczyźnie, to spełniony jest warunek e(t) → 0. Wektor k dobieramy tak, by otrzymać jak najszybszą zbieżność.
-Sformułowanie zagadnienia
Dane :
1. wektor współczynników wielomianu charakterystycznego obiektu sterowania - p,
2. wektor współczynników wielomianu charakterystycznego obserwatora - ![]()
,
3. macierze A, c są w postaci kanonicznej dla obserwowania.
Szukane :
Tak dobrać wektor k, aby macierz ![]()
miała pożądane własności dynamiczne.
Rozwiązanie :
Z jednej strony mamy :
Prowadzi to do równości :
![]()
Dualność
Zagadnienia konstruowania regulatora i obserwatora są dualne. Podsumujmy uzyskane dotychczas rezultaty.
DANE :
Opis obiektu sterowania w przestrzeni stanów za pomocą macierzy A,b,c. Własności dynamiczne obiektu są określone przez współczynniki wielomianu charakterystycznego :
![]()
: ![]()
REGULATOR |
OBSERWATOR |
CEL |
|
Tak dobrać wektor g , aby układ sterowanie miał pożądane własności dynamiczne :
|
Tak dobrać wektor k, tak aby obserwator miał pożądane własności dynamiczne :
|
TWIERDZENIE 1 |
|
1. Jeżeli obiekt jest w pełni sterowalny oraz 2. Macierze A, b są w postaci kanonicznej dla sterowania,
TO : |
1. Jeżeli obiekt jest w pełni obserwowalny oraz 2. Macierze A, c są w postaci kanonicznej dla obserwowania,
TO : |
TWIERDZENIE 2 |
|
Jeżeli obiekt jest w pełni sterowalny, ale macierze A, b są w dowolnej postaci
TO :
|
Jeżeli obiekt jest w pełni obserwowalny, ale macierze A, c są w dowolnej postaci,
TO :
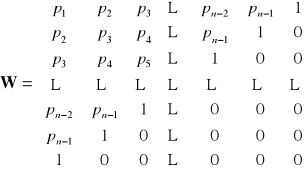
|
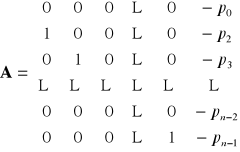
Macierz W jest utworzona ze współczynników wielomianu charakterystycznego obiektu sterowania :
Algorytm konstruowania układu regulacji
1. Wyznacz współczynniki wielomianu charakterystycznego dla obiektu sterowania, pamiętając by pn = 1.
2. Przedstaw obiekt w postaci kanonicznej dla obserwowania, sprawdź sterowalność (obserwowalność wynika z przyjętej postaci).
Jeżeli niedostępne są zmienne stanu to :
3. Określ pożądane własności dynamiczne obserwatora podając położenia biegunów :![]()
.
4. Wyznacz współczynniki wielomianu charakterystycznego obserwatora, korzystając z zależności :
![]()
.
5. Wyznacz : ![]()
i przyjmij ![]()
, ![]()
6. Określ pożądane własności dynamiczne układu sterowania podając położenie biegunów : ![]()
.
7. Wyznacz współczynniki wielomianu charakterystycznego układu sterowania :
![]()
8. Wyznacz ![]()
Zastosowanie członu całkującego
Jak do tej pory, stosując proporcjonalne sprzężenie zwrotne, potrafiliśmy dowolnie zmieniać własności dynamiczne obiektów. Z punktu widzenie układu regulacji sprowadzaliśmy obiekt do członu inercyjnego o możliwie małych stałych czasowych. Realizowaliśmy tym samym postulaty 0 i 1. Zastosowanie tylko samego sprzężenia zwrotnego nie pozwala na zrealizowanie postulatu 2, czyli wyeliminowanie odchyłki statycznej. Stąd też proponuje się strukturę układu regulacji, zawierającą w pętli sprzężenia zwrotnego człon całkujący.
z(t) u(t) y(t)
_ _
Zastanowimy się teraz, jak wpływa na własności dynamiczne obiektu dołączenie w ujemnym sprzężeniu zwrotnym członu całkującego. Rozważania przeprowadzimy korzystając z pojęcia transmitancji, co pozwoli na uzyskanie bardziej czytelnych wyników.
Transmitancja całego układu ma postać :
![]()
Obiekt sterowania jest zaznaczony na rysunku linią przerywaną i jest opisany transmitancją G0(s). Regulator jest członem całkującym o transmitancji oznaczonej GR(s).
Wnioski :
1. Rząd układu wzrósł o jeden.
2. Sygnał wejściowy jest różniczkowany i zakłócenia stałe, różne od zera, nie powodują pobudzenia układu - dzięki temu jesteśmy w stanie wyeliminować odchyłkę statyczną i zrealizować postulat 2.
3. Mianownik transmitancji H(s) możemy kształtować odpowiednio dobierając wektor współczynników p i stałą czasową T regulatora I.
Chcemy, aby cały układ sterowania miał własności określone następującym wielomianem charakterystycznym :
![]()
Na podstawie wniosku 1, wiemy że musi to być wielomian stopnie n+1.
Zadajemy następujące pytanie ; jaki wielomian charakterystyczny ![]()
powinien mieć obiekt sterowania ze sprzężeniem typu P i jaka powinna być stała czasowa, aby cały układ ze sprzężeniem I miał pożądane własności ? Prowadzi to do układu równań :
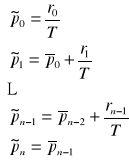
Pomimo tego, że jest to układ nieliniowy względem T, to można go bardzo łatwo rozwikłać. Rozwiązanie jest następujące :
Żeby rozwiązanie miało sens to ![]()
i r0 muszą być różne od zera. W praktyce jest to spełnione. Gdyby ![]()
było równe zero, to cały układ byłby co najmniej na granicy stabilności, a takie własności nie są pożądane. Równość r0 = 0 oznacza, że układ bez sprzężenia zwrotnego I różniczkowałby sygnał wejściowy eliminując tym samym odchyłkę statyczną.
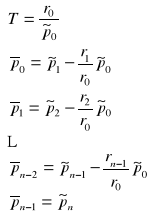
Przykład
Wyznaczyć opis w przestrzeni stanów 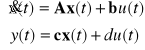
obiektu opisanego za pomocą transmitancji ![]()
.
Wielomian charakterystyczny obiektu ![]()
. Współczynnik przy najwyższej potędze jest równy jeden, zatem wykorzystując postać kanoniczną do sterowania zapisuje się :
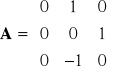

![]()
.
Przykład
Dla obiektu z poprzedniego przykładu wyznaczyć wektor g sprzężenia zwrotnego od stanu, tak aby taki układ regulacji miał wszystkie bieguny położone w punkcie s123 = -1.
Obliczamy pożądany wielomian charakterystyczny :
![]()
wektor współczynników tego wielomianu 
.
wektor współczynników wielomianu charakterystycznego obiektu : 
.
Ponieważ został wykorzystany opis w postaci kanonicznej dla sterowania, to wektor sprzężenia zwrotnego wynosi :
.
Przykład
Wyznaczyć układ regulacji w sprzężeniu od stanu przy wykorzystaniu obserwatora i działania całkującego. Obiekt jak w poprzednich przykładach. Bieguny obserwatora ![]()
, bieguny układu regulacji : ![]()
.
Należy zatem wyznaczyć : stałą czasową członu całkującego T, wektor sprzężenia proporcjonalnego od estymat zmiennych stanu g, parametry obserwatora : ![]()
.
Przyjmujemy opis obiektu w postaci kanonicznej dla obserwowania
c = [ 1, 0, 0 ].
Wyznaczamy pożądany wielomian charakterystyczny układu regulacji i zarazem wektor współczynników.
![]()
![]()
Rozwiązując odpowiedni układ równań wyznaczamy stałą czasową członu całkującego oraz pożądany wielomian charakterystyczny układu ze sprzężeniem zwrotnym od stanu.
![]()
Wyznaczamy strukturę obserwatora : 
Ponieważ obiekt jest opisany w postaci kanonicznej dla obserwowania, to ![]()
.
Wielomian charakterystyczny obserwatora i jego wektor jego współczynników
![]()
![]()
. Zatem
.
Macierz obserwatora 
oraz 
.
Ponieważ zmienne stanu odtwarzane przez obserwator nie odpowiadają opisowi w postaci kanonicznej dla sterowania, to wektor g sprzężenia zwrotnego od zmiennych stanu wyznacza się z zależności :
![]()
Macierz sterowalności 
.
Macierz współczynników obiektu 
.
Stąd 
.
16
![]()
c
![]()
g

Wyszukiwarka