PROJEKT TECHNICZNY CHWYTAKA
Jakub Gorycki grupa 1
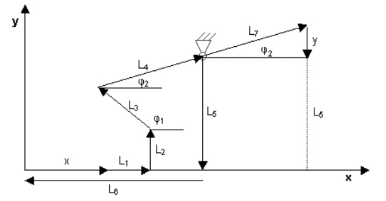
1. Schemat kinematyczny chwytaka
Rysunek 1 Schemat kinematyczny chwytaka
Wyznaczenie ruchliwości chwytaka
Ruchliwość chwytaka wyznacza się zgodnie ze wzorem:
w = 3n - 2p5 - p4
gdzie:
n - liczba członów ruchomych
p4 - liczba par kinematycznych 4 klasy
p5 - liczba par kinematycznych 5 klasy
W tym przypadku:
n = 5 [1; 2; 2'; (3,4); (3',4')]
p4 = 0
p5 = 7 [(0,1); (1,2); (1,2'); (2,3); (2',3'); (3,4); (3',4')]
w = 15 - 14 - 0 = 1
Ruchliwość w = 1 oznacza, że do napędu chwytaka zostanie zastosowany jeden siłownik pneumatyczny o ruchu liniowym.
2. Analiza chwytaka
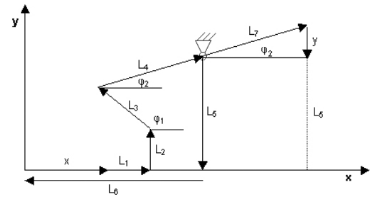
Charakterystyka przesunięciowa:
gdzie:
L1 = 15 [mm]
L2 = 20 [mm]
L3 = 26 [mm]
L4 = 40 [mm]
L5 = 35 [mm]
L6 = 80 [mm]
L7 = 60 [mm]
φ1, φ2 - kąty pomiędzy poszczególnymi członami
x - siłownik pneumatyczny wraz z tłoczyskiem
y - przesunięcie ramienia chwytnego
Z rysunku:
![]()
a więc rzutując na osie układu:

(1)
jednocześnie:
y=![]()
sin![]()
+ ![]()
=![]()
![]()
(2)
x=40+∆x
przekształcając dalej (1)
Następnie podnosząc obustronnie do kwadratu i dodając:
![]()
(3)
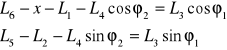
Po podstawieniu długości poszczególnych członów, skorzystaniu z jedynki trygonometrycznej otrzymuje równanie kwadratowe gdzie niewiadomą jest sinus kąta φ2 (pełne rozwiązanie znajduje się na dołączonym wydruku z programu MathCAD (ZALĄCZNIK 1). Zamieszczam tu tylko wykres charakterysyki przesunięciowej:
Zależność ta jawnie dana jest wzorem:
widać więc, że ![]()
,a ![]()
można więc przyjąć, uwzględniając wymiary elementów chwytnych, że chwytak ten jest w stanie przenosić wałki lub tuleje o zakresie średnic: ![]()
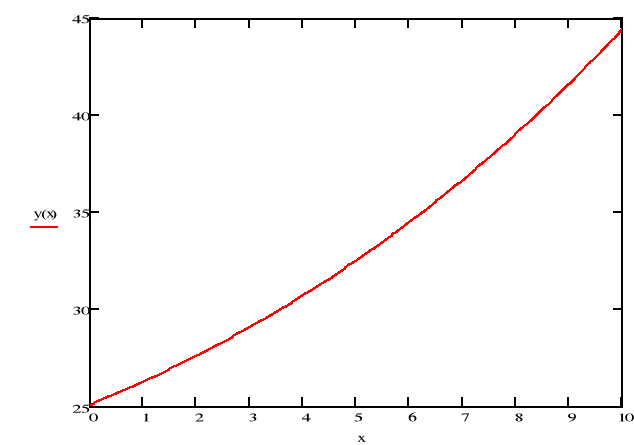
Charakterystyka prędkościowa
Charakterystyka prędkościowa wyrażona jest wzorem ![]()
Zostaje ona wyznaczona na podstawie charakterystyki przesunięciowej chwytaka, również na załączonym wydruku z programu MathCAD. Ze względu na objętość oraz złożoność wzoru nie zostanie zaprezentowany tu jawnie, a jedynie w formie wykresu.
Dla porównania zamieszczam wykresy wykonane przez program SAM. Widać, że wykresy te są prawie identyczne jedyna różnica to wartości na osiach, wynika ona z rozpoczęcia rysowania modelu w programie SAM w punkcie innym niż początek układu:
3. Wyznaczenie koniecznej siły chwytu Fch i obliczenie wymiarów szczęki.
Dane:
dmax = 75mm - maksymalna średnica obiektu manipulacji (wałka tulei)
lmax = 100mm - maksymalna długość transportowanego obiektu
q = 7,7 * 10-5 N/mm2 - ciężar właściwy stali
μ = 0,2 - współczynnik tarcia pomiędzy przedmiotem manipulacji, a szczękami chwytaka
n = 2 - współczynnik bezpieczeństwa
![]()
- kąt nachylenia szczęk chwytaka
Ciężar maksymalny obiektu transportowanego:
![]()
Siła chwytu:
![]()
Szerokość szczęki:
![]()
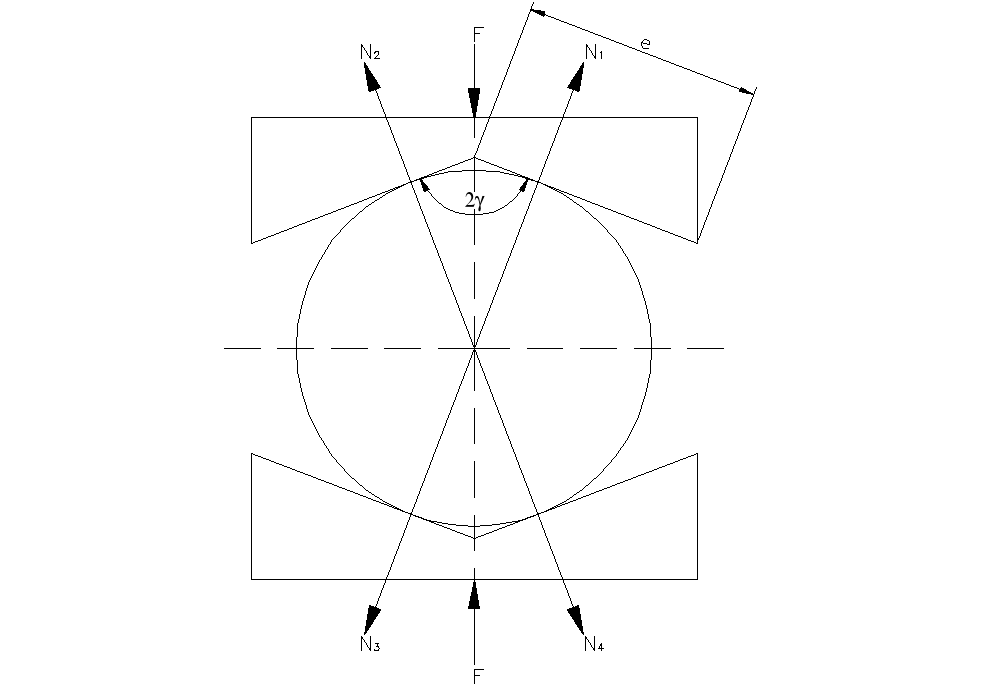
4. Wyznaczenie charakterystyki siłowej chwytaka
Rysunek 3 Schemat obliczeniowy mechanizmu chwytaka
Siły wyznaczam dla maksymalnego rozwarcia szczęk chwytaka, wynika to z faktu, że w dalszej części projektu będę potrzebował tych wartości do obliczeń wytrzymałości.
Analiza sił w grupie strukturalnej (2,3):
Warunek równowagi sił działających na grupę można zapisać w postaci:
![]()
![]()
Następnie korzystając z warunków równowagi momentów względem punktu C osobno dla członu 2 i członu 3:
![]()
![]()
![]()
oraz
![]()
![]()
Wykreślne rozwiązanie równania w podziałce 
ma postać:
Można, więc wyznaczyć wartości poszczególnych sił:
R43 =146.27 N
Rn03 = 350.4 N
Rt03 = 365.67 N
Rn12 = 423.4 N
Analiza sił przyłożonych do członu napędzającego:
Można, więc zapisać równanie równowagi sił dla członu napędzającego, oraz warunek równowagi momentów sił względem punktu A dla członu 1:
![]()
![]()
![]()
![]()
Skąd:
![]()
![]()
![]()
Stąd rozwiązanie wykreślne w podziałce 
ma postać:
Z planu sił wynika, że R01 = 0.
Czyli:
Pr1 = 797,44 N
5. Sprawdzenie metodą mocy chwilowych
Charakterystyka siłowa (przełożenie siłowe) chwytaka wyraża się wzorem:
![]()
gdzie:
FS - siła na wyjściu zespołu napędowego (siłownika) chwytaka
FCh - siła chwytu
FF(x) - przełożenie siłowe mechanizmu chwytaka
Ze względu na złożoność obliczeń charakterystykę tą wyznaczam metodą mocy chwilowych, a następnie sprawdzam poprzez modelowanie komputerowe w programie SAM.
Dla dowolnego chwytaka bilans mocy chwilowych przy pominięciu tarcia, sił ciężkości, sił ciężkości oraz bezwładności jego elementów ma postać:
![]()
, gdzie ![]()
; ![]()
czyli:
![]()
stąd ![]()
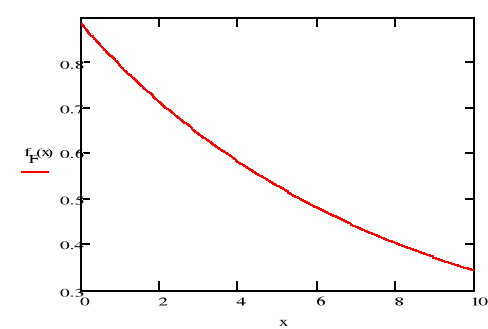
Na podstawie ostatniego równania można wyznaczyć charakterystykę siłową przy pomocy charakterystyki prędkościowej:
![]()
, czyli ![]()
Dokładny jawny wzór tej charakterystyki jest również zawarty na dołączonym wydruku z programu MathCAD. Tutaj prezentuje jedynie wykres.
Na tej podstawie można wyznaczyć zależność siły potrzebnej na siłowniku, do wysunięcia tłoczyska x:
![]()
(wyznaczona również w programie MathCAD)
Zależność tą przedstawiono na poniższym wykresie:
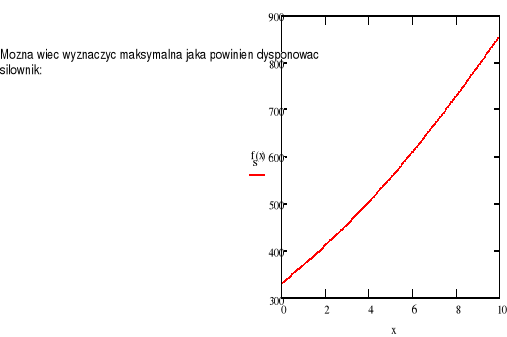
Wyznaczoną w ten sposób charakterystykę siłową chwytaka sprawdzam metodą symulacji komputerowej przeprowadzonej w programie SAM. Poniżej zamieszczam wykonany tam wykres zależności siły na siłowniku do wydłużenia tłoczyska x. Ponadto widać, że wynik otrzymany metodą mocy chwilowych odbiega od wyniku otrzymanego metodą grafoanalityczną w granicach 8%. Rozbieżności wynikają z niedokładności rysunków (grubość kreski, niedokładność pomiaru długości, niezachowanie idealnych wielkości kątów podczas konstrukcji(w czym tkwi moim zdaniem największa niedokładność), można, więc przyjąć, że wynik mieści się w granicach błędu.
M. grafoanalityczna |
M. mocy chwilowych |
Fmax = 797 N |
Fmax = 857 N |
Procentowa wielkość błędu |
|
7% |
|
6. Obliczenia wytrzymałościowe chwytaka
Maksymalny moment gnący
Maksymalny moment gnący występuje w punkcie B i wynosi:
Mgmax = R2,1*40*sin148,8 = 8770
Przyjmujemy przekrój prostokątny ramienia chwytaka o wskaźniku wytrzymałości na zginanie:
![]()
Warunek wytrzymałościowy na zginanie ramienia chwytaka ma postać:
![]()
=![]()
=
Przyjmuję:
b = 7 mm - szerokość przekroju belki
h = 8 mm - wysokość przekroju belki
![]()
=![]()
=![]()
![]()
Ścinanie sworznia w punkcie C
Warunek wytrzymałościowy na ścinanie sworznia Ø5 w punkcie C:
![]()
gdzie: ![]()
, d - średnica sworznia:
= ![]()
= ![]()
= 80![]()
7. Obliczenia wymaganych parametrów napędu pneumatycznego
Dane:
FS = 857 N - niezbędna siła na wyjściu siłownika
K = 1,2 - 1,5 - współczynnik przeciążenia
pn = 0,6 MPa - ciśnienie nominalne zasilania
Siła pchająca lub ciągnąca siłownika:
Pw = K * FS = 1,2 * 857 = 1028,4 N
Do napędu chwytaka zdecydowałem się na siłownik dwustronnego działania z serii 5200 firmy Mannesmann numer katalogowy: 520-010-161-0 - średnica wewnętrzna cylindra - D = 50 [mm], średnica tłoczyska d = 16 [mm]
Teoretyczna siła pchająca tłoka cylindra pneumatycznego: ![]()
= ![]()
= 1178.1 N
Teoretyczna siła ciągnąca tłoka cylindra pneumatycznego: ![]()
= ![]()
= 1057,46 N
![]()
Projekt techniczny chwytaka
Strona 9
Rn21
|Rn21|=59,5mm
Rn03
|Rn03|=120mm
Rt03
|Rt03|=125mm
Rn12
|Rn12|=145mm
R43
|R43|=50mm
![]()
![]()
![]()
![]()
![]()
CHWYTAK
Rysunek 2 Schemat obliczeniowy
Rysunek 2 Schemat obliczeniowy
R'n21
|R'n21|=59,5mm
Pr1
|Rr1|=112mm
x
Frzch
A
b
C
RBy
RBx
RAy
RAx
+
8770
Wyszukiwarka