 | Pobierz cały dokument chwytak.agh.wimir.air.semestr.6.rp.projekt.doc Rozmiar 1.28 MB |
PROJEKT TECHNICZNY CHWYTAKA
Jakub Gorycki grupa 1
1. Schemat kinematyczny chwytaka
Rysunek 1 Schemat kinematyczny chwytaka
Wyznaczenie ruchliwości chwytaka
Ruchliwość chwytaka wyznacza się zgodnie ze wzorem:
w = 3n - 2p5 - p4
gdzie:
n - liczba członów ruchomych
p4 - liczba par kinematycznych 4 klasy
p5 - liczba par kinematycznych 5 klasy
W tym przypadku:
n = 5 [1; 2; 2'; (3,4); (3',4')]
p4 = 0
p5 = 7 [(0,1); (1,2); (1,2'); (2,3); (2',3'); (3,4); (3',4')]
w = 15 - 14 - 0 = 1
Ruchliwość w = 1 oznacza, że do napędu chwytaka zostanie zastosowany jeden siłownik pneumatyczny o ruchu liniowym.
2. Analiza chwytaka
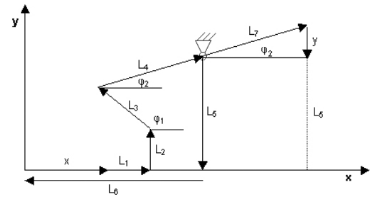
Charakterystyka przesunięciowa:
gdzie:
L1 = 15 [mm]
L2 = 20 [mm]
L3 = 26 [mm]
L4 = 40 [mm]
L5 = 35 [mm]
L6 = 80 [mm]
L7 = 60 [mm]
φ1, φ2 - kąty pomiędzy poszczególnymi członami
x - siłownik pneumatyczny wraz z tłoczyskiem
y - przesunięcie ramienia chwytnego
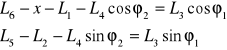
Z rysunku:
![]()
a więc rzutując na osie układu:

(1)
jednocześnie:
y=![]()
sin![]()
+ ![]()
=![]()
![]()
(2)
x=40+∆x
przekształcając dalej (1)
Następnie podnosząc obustronnie do kwadratu i dodając:
![]()
(3)
Po podstawieniu długości poszczególnych członów, skorzystaniu z jedynki trygonometrycznej otrzymuje równanie kwadratowe gdzie niewiadomą jest sinus kąta φ2 (pełne rozwiązanie znajduje się na dołączonym wydruku z programu MathCAD (ZALĄCZNIK 1). Zamieszczam tu tylko wykres charakterysyki przesunięciowej:
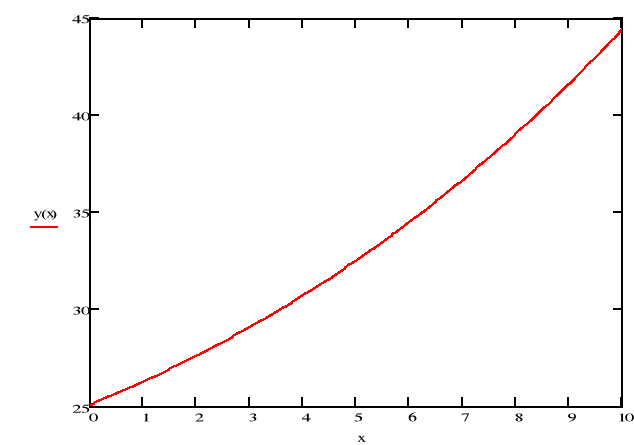
Zależność ta jawnie dana jest wzorem:
widać więc, że ![]()
,a ![]()
można więc przyjąć, uwzględniając wymiary elementów chwytnych, że chwytak ten jest w stanie przenosić wałki lub tuleje o zakresie średnic: ![]()
Charakterystyka prędkościowa
Charakterystyka prędkościowa wyrażona jest wzorem ![]()
 | Pobierz cały dokument chwytak.agh.wimir.air.semestr.6.rp.projekt.doc rozmiar 1.28 MB |