 | Pobierz cały dokument pkm.bez.ziip.inne.kierunki.politechnika.sem.iv.doc Rozmiar 448 KB |
PROJEKTOWANIE KONSTRUKCJI MECHANICZNYCH
PROJEKT CHWYTAKA MANIPULATORA ROBOTA IRP-6
Projektowali:
Krzysztof Buczek
Dariusz Rudziński
Automatyka i Robotyka
semestr 6
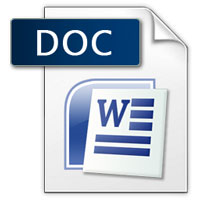
1. Schemat kinematyczny manipulatora.
2.Obliczenie wymiarów przedmiotu.
Dane:
gęstość ρ = 7000 kg/m3
przyspieszenie ziemskie g = 9,81 m/s2
ciężar Q = 20N
Q = m⋅g
masa m = ![]()
m=![]()
= 2,039 kg
ρ = ![]()
V= ![]()
= 0.29⋅10-3 m3
Jako że założyliśmy, że przedmiot obsługiwany przez manipulator będzie walcem, wobec tego objętość V=π⋅r2⋅h
V=π⋅r2⋅h
![]()
h = 0,1m
r =0,03m =30 mm.
Przedmiot obsługiwany przez manipulator będzie walcem o średnicy 60 mm, wysokości 100 mm, oraz ciężarze 2kg.
3. Obliczenie siły nacisku niezbędnej do przenoszenia przedmiotu.
przyspieszenie a=0,8 m/s2
masa m=2kg.
współczynnik tarcia μ=0,2
B= a⋅m = 0,8 ⋅ 2 = 1,6N
2⋅T > Q+B
2⋅μ⋅N > 21,7N
N >![]()
N > 54,25N
Przyjmujemy N=60N.
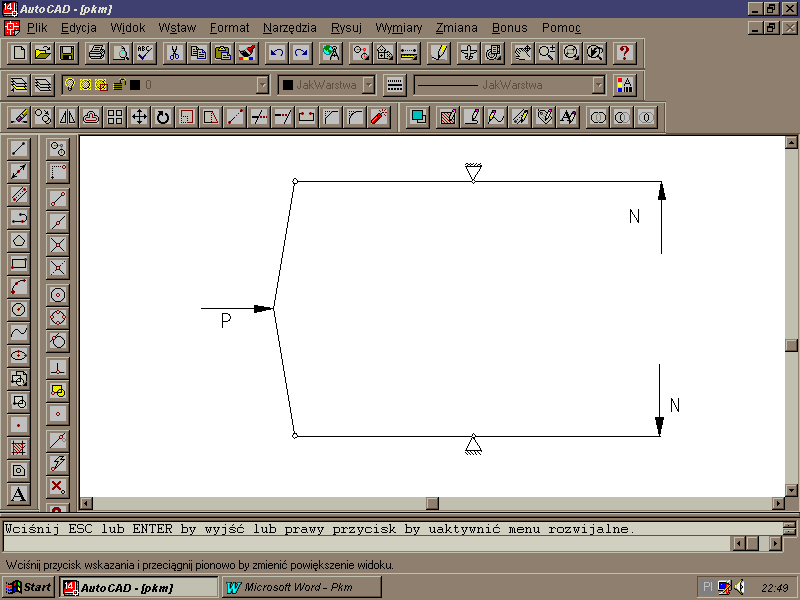
4.Obliczenie przekładni czyli zależności siły P od F.
Przekładnia zostanie wyznaczona ze wzoru na sumę momentów, oraz z zależności na tangens kąta θ.
ΣMo = N⋅l2 - F⋅l1 - Fs⋅lS = 0
F=![]()
5. Obliczenie długości belek.
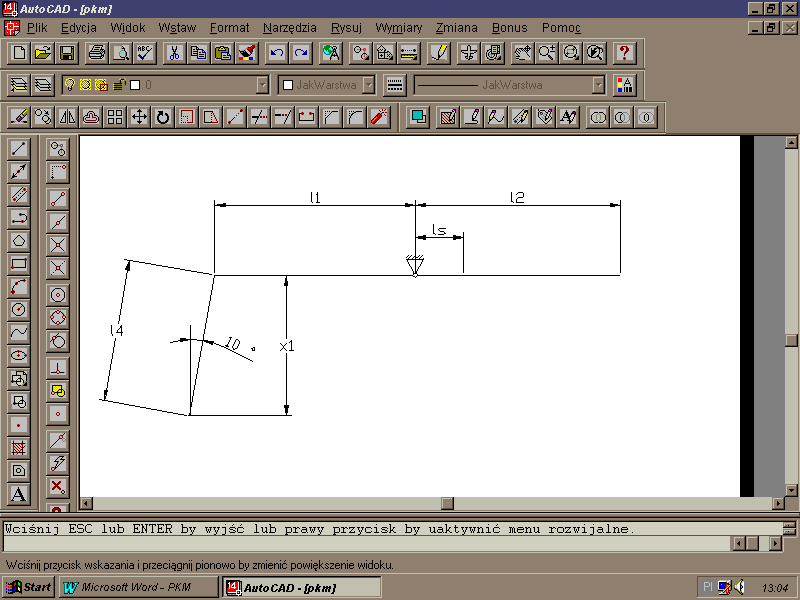
Znając średnicę przedmiotu (d = 60 mm), przyjmując naddatki na nakrętkę, przyjmując orientacyjnie szerokość belek jako ≈ 10mm, oraz uwzględniając wymiary chwytaków przyjęto długość x1 jako 35 mm. Ponadto założono że kąt θ będzie się zmieniał od 10° (podczas trzymania przedmiotu) do 55°.
x1 = 35 mm
l4 = ![]()
= 35,5 mm.
Sytuacja podczas otwartych ramion manipulatora.
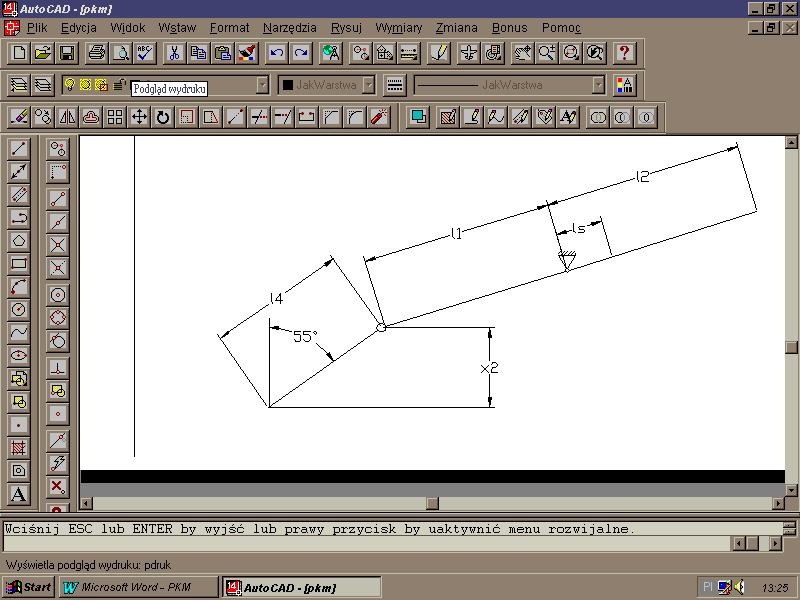
x2 = l4⋅cosθ
x2 = 35,5⋅ cos 55°
x2 = 20,4 mm
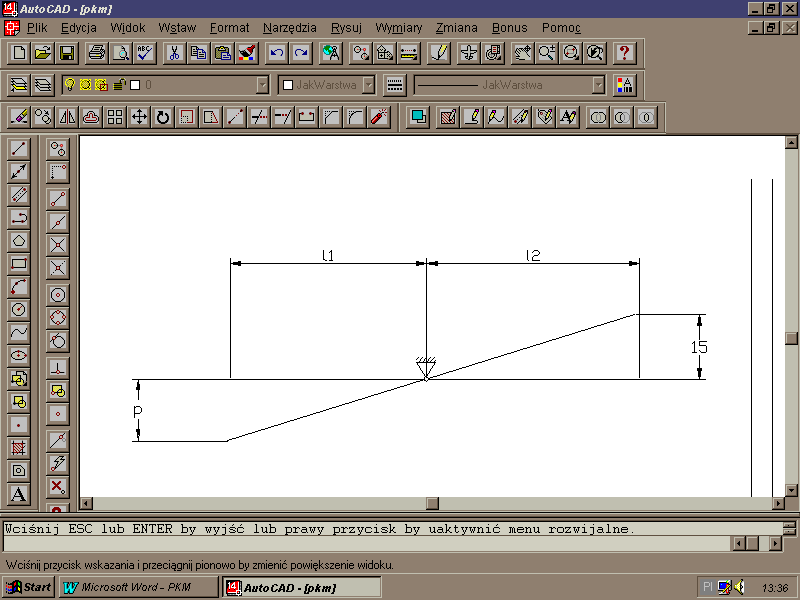
Ażeby wyznaczyć długości belek l1 i l2 skorzystamy z informacji że, ramiona manipulatora mają odchylać się na 15mm.

![]()
l2 =![]()
zakładamy długość l1 jako 50mm, a więc l2 jest równe 51 mm.
 | Pobierz cały dokument pkm.bez.ziip.inne.kierunki.politechnika.sem.iv.doc rozmiar 448 KB |