 | Pobierz cały dokument mechanizm.jarzmowy.uczelnia.teoria.doc Rozmiar 436 KB |
|
||||
Projekt z Teorii mechanizmów i maszyn |
||||
|
||||
Akademia Górniczo Hutnicza w Krakowie |
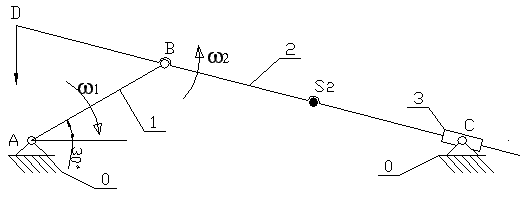
Temat: Analiza kinematyczna i kineostatyczna mechanizmu dźwigniowego.
|
Rok akademicki: 2001/2002 |
Semestr: 2 |
Data:
|
Grupa: 8
|
|
Ocena: |
Podpis: |
|
δ ρ
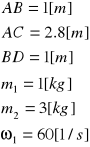
Dane :
Analiza strukturalna mechanizmu.
Obliczam ruchliwość i klasę mechanizmu.
Ruchliwość mechanizmu wynosi :
Struktura mechanizmu :
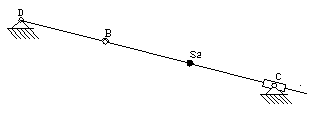
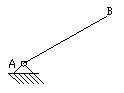
Rys. Człon napędzający Rys. Grupa strukturalna
Człony 2 i 3 tworzą grupę strukturalną klasy II postaci 2
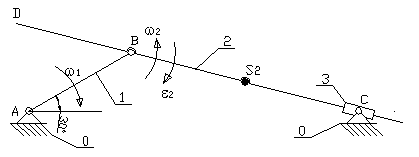
2. Analiza kinematyczna mechanizmu.
2.1 Model mechanizmu w programie AKM.
Zamodelowany mechanizm jest zapisany w postaci pliku AKM „model” na dołączonej dyskietce.
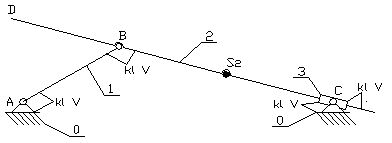
2.2.1 Wyznaczam prędkości liniowe i kątowe oznaczonych na rysunku punktów mechanizmu metodą grafo-analityczną (metoda planów)
Szukam prędkości punktów A, B, C0, C2, C3, D (![]()
![]()
![]()
W celu znalezienia prędkości liniowych należy rozwiązać układ równań porównując ich prawe strony.
(2.2.0)
Rozwiązaniem układu (2.2.0) jest plan prędkości przedstawiony na rysunku poniżej.
Podziałka prędkości :
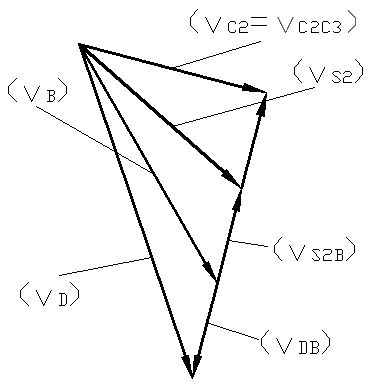
Odpowiednie prędkości wynoszą :

Rys. Plan prędkości mechanizmu jarzmowego.
Prędkość punktu D znajdziemy z zależności :
![]()
(2.2.1)
tak więc :
![]()
Prędkość kątowa ![]()
, ![]()
i ![]()
wynoszą :
![]()
![]()
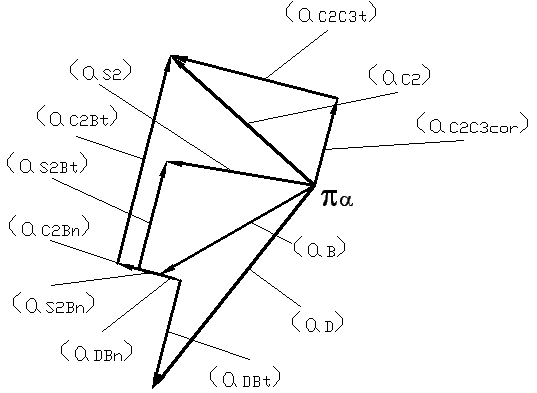
2.2.2 Szukam przyspieszeń punktów B, C2, S2, D (![]()
Przyspieszenie punktu B:
![]()
(2.2.2)
gdzie :
![]()
ponieważ ![]()
Przyjmuje podziałkę przyspieszeń - 
Ponieważ suwak obraca się razem z jarzmem to jego przyspieszenie kątowe jest równe przyspieszeniu kątowemu jarzma, czyli ![]()
. W celu znalezienia przyspieszeń liniowych należy rozwiązać układ równań porównując ich prawe strony.
(2.2.3)
gdzie :
![]()
 | Pobierz cały dokument mechanizm.jarzmowy.uczelnia.teoria.doc rozmiar 436 KB |