Wyrównanie poziome ciągu tachimetrycznego
A, B - punkty osnowy geodezyjnej,
![]()
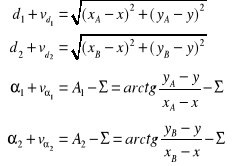
, ![]()
- 'zmierzone' odległości poziome; ![]()
, ![]()
- błędy średnie pomiarów odległości
![]()
, ![]()
- 'zmierzone' kierunki; ![]()
, ![]()
- błędy średnie pomiarów kierunków
Przyrosty współrzędnych: ![]()
; ![]()
; ![]()
; ![]()
Przybliżone wartości odległości: ![]()
; ![]()
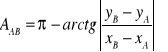
Przybliżone wartości azymutów: ![]()
; ![]()
Przybliżona wartość ![]()
azymutu zera koła poziomego ![]()
- stała orientacyjna tachimetru
![]()
![]()
jest obliczana na podstawie pierwszego zmierzonego kierunku ![]()
.
Przybliżone wartości kierunków: ![]()
; ![]()
.
Linearyzacja równań
Wyprowadzenie równania poprawki azymutu

Linearyzacja

.
Stąd


![]()
- przybliżona wartość mierzonego kierunku.
Stąd

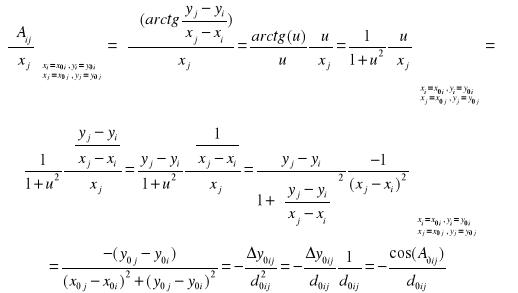
Pochodne cząstkowe
![]()
otrzymujemy różniczkując funkcje azymutu. Przykładowo
Wyprowadzenie równania poprawki odległości
Linearyzacja
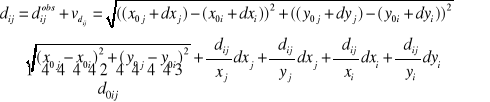
,
Stad

Pochodne ![]()
itp. obliczane są w punkcie ![]()
:




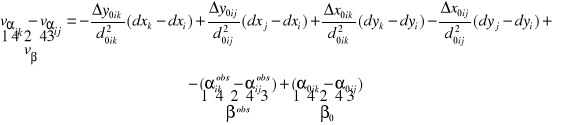
Wzorce równań poprawek odległości i azymutu
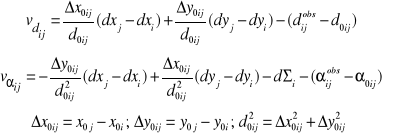
Korzystając z wzorców układamy (odpowiadający oznaczeniom rysunku) układ równań poprawek
![]()
![]()
![]()
![]()
![]()
Ponieważ punkty A i B są stałe (dokładne), to ![]()
, to
![]()
![]()
![]()
![]()
Wynikiem rozwiązania tego układu powinny być wielkości wyrównane
![]()
Układ ten (w celu uproszczenia oznaczeń) można przepisać następująco
![]()
, ![]()
.
![]()
![]()
![]()
![]()
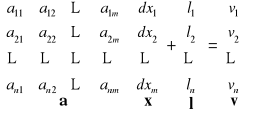
Postać macierzowa
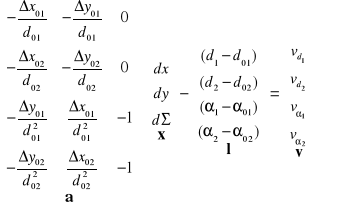
![]()
x - wektor niewiadomych, a - macierz układu równań poprawek, l - wektor wyrazów wolnych.
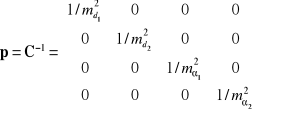
Macierz błędu obserwacji C, macierz wag p
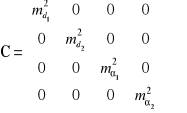
, 
Układ obserwacyjny
![]()
.
Rozwiązanie układu - metoda najmniejszych kwadratów
Układ równań poprawek rozwiązywany jest metodą najmniejszych kwadratów ![]()
![]()
![]()
Macierz ![]()
jest symetryczną macierzą współczynników układu równań normalnych:
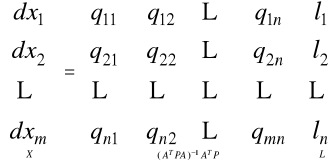
Formalne rozwiązanie (metoda Gaussa, Banachiewicza itp.) tego układu można zapisać w postaci:
![]()
Rozwiązanie ![]()
określają współrzędne stanowiska x, y i stałą orientacyjną ![]()
:
![]()
,![]()
,![]()
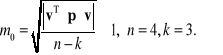
Błędy współrzędnych i stałej orientacyjnej
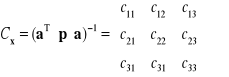
,
![]()
, ![]()
, ![]()
.
Poprawki
![]()
Obserwacje wyrównane
![]()
, ![]()
, ![]()
![]()
Błędy obserwacji wyrównanych
![]()
, ![]()
, ![]()
,![]()
![]()
- kolejne wiersze macierzy układu równań poprawek ![]()
, odpowiadające kolejnym obserwacjom. Są to wektory gradientów odległości i azymutów wyznaczonych na podstawie wyznaczonych współrzędnych przybliżonych.
Błędy poprawek obserwacji
![]()
, ![]()
,
![]()
, ![]()
,
Warunki poprawności wyrównania
Wyrównane współrzędne punktów, odległości i kierunki są poprawne jeśli
![]()
Równanie poprawki kątowej
![]()
![]()

Układ równań poprawek - równań obserwacyjnych w ujęciu macierzowym

![]()
![]()
Układ równań normalnych
Układ ten wynika z warunku:
![]()
,
mówiącego, że suma kwadratów poprawek pomnożona przez współczynniki wag jest minimalna. Zauważmy, że ![]()
jest funkcją skalarną, której argumentami są składowe wektora ![]()
![]()
Minimum tej sumy wyznacza się wykorzystując zależności:
![]()
![]()
W zapisie wykorzystano (skrótową) notację różniczkowania wektorowego. Symbol ![]()
oznacza, że należy wyznaczyć pochodne cząstkowe wyrażenia ![]()
kolejno względem wszystkich argumentów ![]()
tj. składowych wektora x. Takie zależności znacznie upraszczają prowadzenie przekształceń.
Transponując ![]()
otrzymuje się zależność![]()
. Ponieważ z układu poprawek: ![]()
to:
![]()
Otrzymane wyrażenie nazywa się układem równań normalnych. Rozwiązanie tego układu![]()
dane jest zależnością:
![]()
Z postaci tego rozwiązania wynika, że jest ono wektorem, którego składowe są liniowymi funkcjami składowych wektora pomiarów L.
![]()
Analogicznie dla wektora poprawek:
![]()
Wykazano, że wektor rozwiązań X i poprawek V są funkcjami składowych wektora pomiarów L. Można, więc wyznaczyć ich macierze kowariancyjne.
Transponowanie iloczynu macierzy ![]()
8
Cel - B
![]()
![]()
![]()
0
(x0, y0)
Cel - A
![]()
0
Azymut kierunku zera koła poziomego
Azymuty mierzonych
kierunków
Układ równań poprawek
Cel - A
(x, y)
![]()
wyrównane współrzędne stanowiska tachimetru S
![]()
![]()
![]()
y
![]()
![]()
Cel - B
S
![]()
![]()
![]()
![]()
![]()
d2
d1
k
![]()
A
S
![]()
- przybliżone współrzędne stanowiska tachimetru
d
![]()
y
B
![]()
![]()
i
0
Współrzędne przybliżone ![]()
![]()
![]()
![]()
![]()
![]()
d2
Wyznaczenie współrzędnych przybliżonych ![]()
d1
j
Zero koła poziomego
![]()
Wyrównane współrzędne (x, y) stanowiska tachimetru S można wyznaczyć rozwiązując powyższy nieliniowy układ równań poprawek odległości d1, d2 i kierunków α1, α2
Celem wyrównania obserwacji jest wyznaczenie poprawek ![]()
, ![]()
do obserwowanych odległości ![]()
i kierunków ![]()
. Wskaźniki i oznaczają stanowiska tachimetru, j - widoczne ze stanowisk cele.
![]()
wyrównane współrzędne i -tego stanowiska tachimetru, ![]()
współrzędne przybliżone, poszukiwane przyrosty ![]()
![]()
y
![]()
![]()
0
Azymut kierunku zera koła poziomego - stała orientacyjna tachimetru
![]()
Azymut
mierzonego
kierunku
(xA, yA)
S
d2
d1
(xB, yB)
![]()
j - Cel
i
Stanowisko tachimetru
![]()
- wyrównane współrzędne i -tego stanowiska tachimetru
![]()
![]()
1
![]()
![]()
![]()
Równania poprawek linearyzujemy rozwijając je w ucięty szereg Taylora względem przyrostów ![]()
.
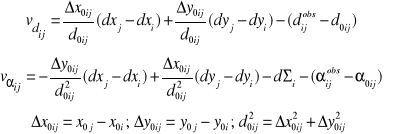
![]()
; ![]()

![]()
Wzory równań poprawek odległości i azymutu
Równania poprawek
Wyszukiwarka