Wielkości podstawowe i uzupełniające układu SI
Wielkość |
Jednostka układu SI |
|
|
Nazwa |
Oznaczenie |
A. Wielkości podstawowe |
|
|
długość |
metr |
m |
masa |
kilogram |
kg |
czas |
sekunda |
S |
natężenie prądu elektrycznego |
amper |
A |
temperatura termodynamiczna |
Kelvin |
K |
światłość |
kandela |
cd |
B. Wielkości uzupełniające |
|
|
kąt płaski |
radian |
rad |
kąt bryłowy |
steradian |
sr |
Metr jest długością równą l 650 763,73 długości fali w próżni ściśle określonego promieniowania monochromatycznego o barwie pomarańczowej, emitowanego przez izotop kryptonu 86.
Kilogram jest masą międzynarodowego wzorca przechowywanego w Międzynarodowym Biurze Miar w Sevres pod Paryżem.
Sekunda jest 1/31 556925,9747 częścią roku zwrotnikowego 1900.
Amper jest natężeniem nie zmieniającego się prądu elektrycznego, który - płynąc w dwóch równoległych prostoliniowych, nieskończenie długich przewodach o przekroju okrągłym, znikomo małym, umieszczonym w próżni w odległości jednego metra jeden od drugiego - wywołuje między tymi przewodami siłę równą 2*10-7 niutona na każdy metr długości przewodu.
Kelwin jest jednostką temperatury termodynamicznej w skali, w której temperatura punktu potrójnego (punkt potrójny odpowiada stanowi równowagi miedzy fazą stałą , ciekłą i gazową) wody jest równa dokładnie 273,16 K.
Kandela jest światłością, która ma w kierunku prostopadłym pole równe ![]()
powierzchni ciała doskonale czarnego, promieniującego w temperaturze krzepnięcia platyny pod ciśnieniem 101 325 N/m2.
Radian jest to jednostka miary łukowej kąta płaskiego, równa stosunkowi łuku l do promienia tego łuku r ![]()
Słownie definicja radiana (rad) brzmi: Radian jest to kąt płaski zawarty między dwoma promieniami koła, wycinającymi z jego okręgu łuk o długości równej promieniowi tego koła.
Steradian. Kąt bryłowy jest to cześć przestrzeni ograniczona powierzchnią stożkową. Jeżeli ze środka pewnej powierzchni kulistej o promieniu r poprowadzimy powierzchnię stożkową wycinającą część kuli o powierzchni S, to powierzchnia ta ograniczy kąt bryłowy Ω równy stosunkowi powierzchni S do kwadratu promienia r : ![]()
Jednostką miary kąta bryłowego jest steradian (sr). Jego definicja brzmi: Steradian jest kątem bryłowym o wierzchołku w środku kuli, wycinającym z jej powierzchni część równą powierzchni kwadratu o boku równym promieniu tej kuli.
Ruch prostoliniowy. Prędkość ruchu.
Ruchem prostoliniowym nazywamy ruch ciała (punktu materialnego) po torze będącym linią prostą.
Prędkość średnia. Jeżeli w chwili to ciało zajmuje położenie A (współrzędna S1), a w chwili 12 położenie B (współrzędna S2), to prędkość średnia ruchu jest definiowana wzorem ![]()
. Prędkość średnia jest. więc ilorazem różnicowym drogi i czasu.
Prędkość chwilowa. Prędkość średnia nie określił dokładnie ruchu ciała. Prawdziwy obraz ruchu ciała. np. na odcinku AB leżącym wzdłuż osi Os ,otrzymamy, znajdując prędkość chwilową w każdym punkcie tego odcinka. Zatem prędkość chwilowa jest więc pochodną drogi względem czasu. Prędkość chwilową nazywamy też po prostu prędkością. ![]()
, ze wzoru tego wynika także , że przyrost drogi Δ S w czasie od 0 do t wyraża się całką 
Ruch prostoliniowy jednostajny.
Jeżeli prędkość ciała jest stała (nie zależy od czasu), to ruch jest jednostajny. Ze wzoru 
przy założeniu, że w chwili t=0, S=0, otrzymujemy wzór na drogę w ruchu jednostajnym prostoliniowym S=vt . Prędkość chwilowa w ruchu jednostajnym jest stała i równa prędkości średniej.
Ruch prostoliniowy zmienny. Przyspieszenie
Jeżeli prędkość ciała zależy od czasu, to ruch nazywamy zmiennym. Niech w chwili t1 prędkość ciała wynosi v1, a w chwili t2 niech wynosi v2. Przyspieszeniem średnim ruchu nazywamy iloraz różnicowy prędkości i czasu, co zapisujemy ![]()
. Przyspieszenie chwilowe, zwane krótko przyspieszeniem, jest pochodną prędkości względem czasu. ![]()
Ruch prostoliniowy jednostajnie zmienny.
Ruch, w którym przyspieszenie jest stałe (a=const), nazywamy mchem jednostajnie zmiennym. Jeżeli a>0, to ruch jest jednostajnie przyspieszony, jeżeli zaś a<0, lo ruch jest jednostajnie opóźniony. Przypadek a=0 określa ruch jednostajny. v = vo + at , a draga określona jest wzorem : ![]()
Ruch krzywoliniowy
Załóżmy że w chwili t punkt znajduje się w punkcie A, a jego położenie określone jest przez wektor wodzący r(t). Po upływie czasu Δt punkt przemieści się po swym torze do punktu B, który jest określony przez wektor![]()
. Droga, jaką przebyło ciało w tym czasie, wynosi ΔS. Iloraz różnicowy przyrostu wektora ![]()
przez czas Δt, w którym ten przyrost nastąpił określa wektor prędkości średniej ![]()
. Prędkość chwilowa wyraża się wzorem :![]()
, ![]()
Ruch po okręgu jest szczególnym przypadkiem ruchu krzywoliniowego. Obierzmy układ współrzędnych 0xy tak, aby początek układu znajdował się w środku koła o promieniu r. Droga kątowa. Położenie punktu A na okręgu można wtedy jednoznacznie określić za pomocą kąta ϕ: kątϕ nosi nazwę drogi kątowej. Jednostką drogi kątowej ϕjest radian. Drogę liniową s przebytą przez ciało po łuku koła można wyrazić za pomocą drogi kątowej następująco S = ϕr Oczywiście, aby wzór ten był prawdziwy droga ϕ musi być wyrażona w radianach.
Prędkość kątowa oznaczana jest przez ![]()
, a prędkość liniowa ![]()
Okres ruchu to czas T potrzebny na przebycie drogi kątowej ϕ = 2π. Dla ruchu jednostajnego po okręgu ![]()
.
Częstotliwością f ruchu po okręgu nazywamy liczbę obiegów punktu po okręgu w jednostce czasu , ![]()
.
Przyspieszenie kątowe. Gdy ruch po okręgu jest niejednostajny, prędkość kątowa ulega zmianom, możemy wówczas wprowadzić nową wielkość charakteryzującą ruch, mianowicie przyspieszenie kątowe ε, które definiujemy jako pochodną, prędkości kątowej względem czasu: ![]()
Inercjalne układy odniesienia. Transformacja Galileusza
Z pierwszej zasady dynamiki wynika, że jeśli na ciało nie działają żadne siły lub działają siły zrównoważone (F=0), to ciało jest nieruchome lub porusza się ruchem jednostajnym prostoliniowym. Ponieważ ruch jest zmianą położenia ciała względem układu.
Otóż okazuje się, że zasada ta obowiązuje tylko w inercjalnych układach odniesienia. Układy odniesienia, w których I zasada dynamiki nie jest spełniona, noszą nazwę układów nieinercjalnych. Pierwsza zasada dynamiki jest w istocie postulatem, że układ inercjalny
istnieje.
Rozpatrzmy dwa układy odniesienia jeden nieruchomy O i drugi O' poruszający się względem układu (J ruchem jednostajnym prostoliniowym x. prędkością v0. Układy te orientujemy tak, aby osie x i x` pokrywały się i aby kierunek tych osi pokrywał się z kierunkiem ruchu układu O'.
Przyjmujmy ponadto, że osie y i y' oraz z i z' są. do siebie równoległe oraz że w chwili t=0 układy pokrywają się.
Załóżmy, że chcemy opisać ruch punktu materialnego P z punktu widzenia obserwatora związanego z układem O i obserwatora związanego /. układem O'.
Dwa układy odniesienia O i O' poruszają się względem siebie mchem jednostajnym prostoliniowym. Prędkość poruszającego się ciała jest w obu układach różna, natomiast przyspieszenie jest jednakowe. x'=x-vot y'=y z'=z Przyjmiemy ponadto, że w obydwu układach odniesienia czas płynie jednakowo, tzn. t'=t Zależności te noszą nazwę transformacji Galileusza.
Pierwsza zasada dynamiki głosi, że ciało nie poddane działaniu żadnej siły albo poddane działaniu sił równoważących się pozostaje w spoczynku lub porusza się ruchem jednostajnym prostoliniowym. Pierwsza zasada dynamiki nosi nazwę zasady bezwładności. Przez bezwładność rozumiemy właściwość ciała decydującą o tym, że ciało bez działania sił nie może zmienić ani wartości, ani kierunku swej prędkości. Czyli bez działania sil pozostaje w takim stanie jak było wcześniej; spoczywa jeśli spoczywało, lub porusza się ruchem jednostajnym jeśli było w jakimkolwiek ruchu.
Druga zasada dynamiki głosi, że: przyspieszenie ciała a jest wprost proporcjonalne do siły F, która to przyśpieszenie wywołuje: F = ma
Trzecia zasada dynamiki zwana również zasadą akcji i reakcji, dotyczy wzajemnego oddziaływania dwóch ciał (względnie układów ciał). Głosi, że jeżeli ciało A działa na ciało B siłą ![]()
a ciało B działa na ciało A siłą ![]()
równą co do wartości, lecz przeciwnie skierowaną: Fab=-Fba
Pęd (p) - wektorowa wielkość fizyczna charakteryzująca ruch postępowy ciała o kierunku i zwrocie pokrywającym się z kierunkiem i zwrotem wektora prędkości. Pęd ciała jest równy iloczynowi masy (m) i prędkości (V) poruszającego się ciała: p = mv.
Jednostką pędu jest kilogramometr na sekundę kg m/s - jest to pęd ciała o masie 1kg poruszającego się z prędkością 1m/s.
Popęd siły (impuls siły) - wektorowa wielkość fizyczna charakteryzująca działanie siły F na ciało w przeciągu czasu Δt; równa jest iloczynowi: FΔt.
Jednostką popędu jest niutonosekunda (Ns) - jest to popęd (impuls) siły udzielony ciału przez działanie na nie w czasie 1s stałej siły równej 1N.
Zasada zachowania pędu - w układach odosobnionych pęd całkowity układu, będący sumą wektorową pędów poszczególnych ciał układu, jest wielkością stałą. W układzie, na który nie działają niezrównoważone siły zewnętrzne, suma pędów początkowych p0 oddziałujących na siebie ciał jest równa sumie pędów końcowych pk tych ciał. Co zapisujemy w postaci p=const. lub pk=p0.
![]()
Moment pędu, kręt, wektor osiowy J charakteryzujący ruch ciała (w szczególności ruch obrotowy): J=r×p (iloczyn wektorowy wektora wodzącego r i pędu ciała).Dla układu ciał moment pędu układu jest sumą wektorową momentu pędu pojedynczych ciał, dla ciała o ciągłym rozkładzie masy moment pędu wyraża się wzorem:
gdzie: V - objętość ciała, dv - element objętości, ρ(r) - funkcja rozkładu gęstości, u(r) - prędkość elementu objętości dv. Równanie ruchu obrotowego ciała ma postać: dJ/dt=D gdzie D moment sił zewnętrznych (moment siły). Moment pędu bryły sztywnej wyraża się (w układzie odniesienia, w którym oś obrotu przechodzi przez początek układu) poprzez tensor momentu bezwładności I i prędkość kątową ω, J=Iω. Moment pędu izolowanego układu jest zachowywany (zasada zachowania krętu).
Coriolisa siła, jedna z sił bezwładności działająca na ciało znajdujące się w nieinercjalnym (tu: obracającym się) układzie odniesienia, Fcor = -2m ω×v, gdzie m - masa ciała, ω - wektor prędkości kątowej obracającego się układu, v - wektor prędkości liniowej ciała mierzony w obracającym się układzie odniesienia .Siła Coriolisa spowodowana dziennym ruchem obrotowym działa na poruszające się poziomo na Ziemi ciała, osiągając największe wartości na biegunach (przy ruchu poziomym wektory ω i v są prostopadłe, niezależnie od kierunku v), a jej składowa pozioma zanika na równiku. Na półkuli północnej powoduje odchylanie się poruszających się poziomo ciał na prawo (odpowiedzialne np. za intensywniejsze podmywanie prawych brzegów rzek), a na półkuli południowej - w lewo. Siła Coriolisa działa na spadające swobodnie ciała, odchylając je od pionu w kierunku wschodnim. Siła działająca na jednostkową masę nazywa się przyspieszeniem Coriolisa.
Nieinercjalny układ odniesienia, fizyczny układ odniesienia, w którym nie jest spełniona I zasada dynamiki Newtona: np. układ związany z obracającym się ciałem (w szczególności układ związany z Ziemią) lub ciałem poddanym przyspieszeniom liniowym. Przeciwieństwo układu odniesienia inercjalnego. W nieinercjalnym układzie odniesienia obserwuje się np. siłę Coriolisa, siłę odśrodkową, inne siły bezwładności.
Siły bezwładności, pozorne siły działające na ciała fizyczne w nieinercjalnych układach odniesienia (styczna siła bezwładności, siła odśrodkowa, siła Coriolisa). Liczbowo siły bezwładności równe są iloczynowi masy i odpowiedniego przyspieszenia, a skierowane przeciwnie niż siła wymuszająca ruch.
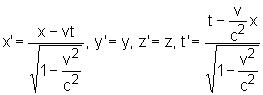
Lorentza transformacja, Lorentza przekształcenie, przekształcenie matematyczne opisujące transformacje wielkości fizycznych w czasoprzestrzeni czterowymiarowej przy przechodzeniu od jednego inercjalnego układu odniesienia, określonego przez współrzędne przestrzenne x, y, z i współrzędną czasową t, do drugiego, określonego przez współrzędne x', y', z' oraz t'. W najprostszym przypadku, jeśli układ (x', y', z', t') porusza się jednostajnie w kierunku osi x z prędkością v, to transformacja Lorentza ma postać:
gdzie c - prędkość światła w próżni.
transformacji Lorentza wynikają wszystkie efekty kinematyczne szczególnej teorii względności, takie jak: reguła sumowania się prędkości prowadząca do niemożności uzyskania prędkości większej od prędkości światła, względność pojęcia równoczesności, skrócenie Lorentza-Fitzgeralda, spowolnienie biegu poruszających się zegarów.
Czasoprzestrzeń, przestrzeń czterowymiarowa, w której oprócz trzech składowych przestrzennych występuje składowa czasowa, podstawowe pojęcie współczesnej fizyki, inaczej: przestrzeń zdarzeń fizycznych. Pojęcie czasoprzestrzeni wprowadził A. Einstein w szczególnej teorii względności.
Względności teoria szczególna, STW Podstawowe założenie STW to stałość prędkości światła w każdym układzie odniesienia (Michelsona-Morleya doświadczenie) - wynika z tego prawo transformacji współrzędnych przestrzennych i czasu przy przejściu od jednego układu odniesienia do drugiego, opisane przez transformację Lorentza, oraz postulat prawdziwości zasady względności głoszącej, że prawa fizyki mają taką samą postać w każdym inercyjnym układzie odniesienia.
Dodawanie prędkości wg Einsteina. Przedmiot ma już prędkość ux w jednym układzie i u`x w innym układzie , który porusza się z prędkością v. A więc u`x = ux + v , wiedząc że dx`=γdx + γvdt i ![]()
dzieląc pierwsze równanie przez drugie i zastępując dx/dt i dx`/dt` odpowiednio przez ux i u`x otrzymujemy : 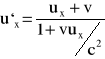
-dodawanie prędkości wg Einsteina.
Równoważność masy i energii E=mc2 . E oznacza całkowitą energię ciała. Masa ciała w spoczynku jest równa masie i jego energia wynosi ![]()
i nazywamy ją energią spoczynkową, co oznacza że ciało będąc w spoczynku posiada pewną energię związaną z jego masą. Jeśli ciało to zostanie wprowadzone w ruch przez działanie siły. Praca tej siły zamieni się energię kinetyczną ciała . Energia kinetyczna ciała równa jest zatem różnicy energii całkowitej ciała w ruchu i jego energii spoczynkowej, czyli ![]()
po przekształceniu tego wzoru mamy 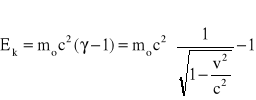
Wzór ten różni się w istocie od wzoru klasycznego ![]()
. Jednak można udowodnić że oba wzory dają te same wyniki dla niewielkich prędkości. W tym celu należy skorzystać z rozwinięcia w szereg : ![]()
w tym przypadku n = -1/2, a x = -v2/c2. Zatem
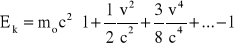
Jeżeli v <<c to w nawiasach możemy pominąć wyrazy o wyższych potęgach i otrzymamy ![]()
Otrzymaliśmy klasyczny wzór na energię kinetyczną , stanowiący szczególny przypadek wzoru relatywistycznego, gdy v <<c.
Według mechaniki relatywistycznej energia kinetyczna jest związana z przyrostem masy ciała. To samo dotyczy innych rodzajów energii. Na przykład każde ciało w miarę podnoszenia go nad poziom Ziemi, zwiększa swoją masę. Oczywiście zmiany te są tak niewielkie, że są niewykrywalne; dopiero w zjawiskach atomowych i jądrowych zmiana masy z energią są znaczne.
Prawo powszechnego ciążenia . Dwa punkty materialne o masach m1 i m2 przyciągają się wzajemnie siłą proporcjonalną do iloczynu ich mas i odwrotnie proporcjonalną do kwadratu ich odległości r , czyli ![]()
gdzie G jest to stała uniwersalna nazywająca się stałą grawitacyjną, która wynosi ![]()
.
Ciężar ciał jest to siła jaką ciało materialne jest przyciągane przez Ziemię. ![]()
gdzie M to masa ziemi, a R jej promień. Siła ta nadaje swobodnie spadającemu ciału przyspieszenie g zwane przyspieszeniem ziemskim F = mg z porównania obu wzorów otrzymujemy zależność na przyspieszenie ziemskie powiązaną z stałą grawitacyjną
![]()
. Wielkość przyspieszenia zależy od szerokości geograficznej co powoduje że jest największa na biegunach, a najmniejsza na równiku gdyż ziemia jest elipsą.
Pole grawitacyjne. W absolutnej pustej przestrzeni jeśli umieścimy punkt materialny o masie M, wówczas w przestrzeni otaczającej masę M powstaje wówczas pole grawitacyjne o takiej własności, że jeśli w dowolnym punkcie tego pola, odległym o r od masy M , umieścimy próbną masę m , to będzie na nią działać siła ![]()
, siła ta w postaci wektorowej przyjmuje postać ![]()
. Natężenie pola grawitacyjnego nazywamy stosunek siły działającej na masę próbną do wartości tej masy. Natężenie pola jest wektorem i wyraża się wzorem: ![]()
.
Energia potencjalna i potencjał pola grawitacyjnego. Siłą grawitacji jest siłą zachowawczą, możemy wobec tego obliczyć energię potencjalną położenia masy próbnej. W tym celu należy obliczyć pracę siły grawitacyjnej wykonaną przy przesunięciu masy próbnej m od danego punktu pola P do punktu odniesienia O. EP = WPO. Niech punkt P znajduje się w odległości rO od masy M wytwarzającej pole grawitacyjne . Praca wykonana przez pole grawitacyjne przy przesunięciu masy próbnej m z punktu P do nieskończoności wynosi : 
, podstawiając za F otrzymujemy ![]()
, zatem grawitacyjna energia potencjalna masy próbnej w dowolnej odległości r od masy M wynosi ![]()
Temperatura jest wielkością skalarną określającą stopień nagrzania ciała. Jej równość zapewnia równowagę termiczną ciał będących w kontakcie (równowaga termiczna). Jednostką temperatury w skali bezwzględnej jest kelwin (K), a w skali Celsjusza stopień (oC).
T-temperatura w skali bezwzględnej, t-w stali Celsjusza , a więc T = t + 273,15 .
Ciepłem nazywamy ilość energii wewnętrznej jaka przepływa między ciałami w wyniku różnicy temperatur. Ciepło jest mikroskopowym sposobem przekazywania energi. Jednostką ciepła podobnie jak energii i pracy jest dżul (J).
Ciepłem właściwym nazywamy ilość ciepła, jaką musi wymienić z otoczeniem ciało o masie 1 kg, aby jego temperatura zmieniła się o 1k. ![]()
, gdzie Q - ilość pobranego ciepła, m - masa, ΔT - przyrost temperatury , jednostką ciepła właściwego jest J/(kgK) .
Ciepłem molowym substancji nazywamy ilość ciepła potrzebną do ogrzania 1 mola tej substancji o 1K. ![]()
Q - ilość ciepła, n - liczba moli substancji , ΔT - zmiana temperatury, C - ciepło molowe. Jednostka ciepła molowego w układzie SI jest J/(mol K). Pomiędzy ciepłem właściwym a ciepłem molowym zachodzi związek C = cμ , gdzie μ - masa molowa.
Równanie stanu gazu doskonałego. Stan pewnej stałej ilości gazu określają jednoznacznie trzy parametry stanu : ciśnienie p , objętość V i temperatura T. PV = nRT, gdzie n - liczba moli danego gazu , a R = 8,314 J/(molK) - uniwersalna stała gazowa. Fikcyjny gaz , który dokładnie spełniałby to równanie w każdych warunkach, nazywamy gazem doskonałym.
Gazy rzeczywiste mają właściwości zbliżone do gazu doskonałego jedynie wtedy, gdy są rozrzedzone. Założenia wprowadzone dla gazu doskonałego przestają jednak obowiązywać przy dużych gęstościach gazu. Wtedy należy uwzględnić np. efekty związane z siłami spójności i skończoną objętość cząsteczek gazu. Zmodyfikowane równanie stanu gazów rzeczywistych dokładniej niż równanie Clapeyrona, zostało wprowadzone przez van der Waalas. Równanie van der Waalsa opisuje z dobrym przybliżeniem stan gazu rzeczywistego i ma postać :![]()
, gdzie a i b - wielkości wyznaczone doświadczalnie dla danego gazu, v = V/n - objętość molowa
Założenia kinetycznej teorii gazu doskonałego. Z mikroskopowego punktu widzenia gaz doskonały możemy też zdefiniować , czyniąc pewne założenia o własnościach cząsteczek gazów rzeczywistych. Mianowicie: 1. Cząsteczki danego gazu można traktować jako punkty materialne o równych masach, 2. Cząsteczki gazu znajdują się w szybkim chaotycznym ruchu. Chaotyczność ruchu oznacza , że cząsteczki poruszają się we wszystkich kierunkach , jakie są tylko możliwe , i że żaden z tych kierunków nie jest uprzywilejowany, 3. Cząsteczki gazu zderzają się sprężyście ze sobą i ze ściankami naczynia . Siły działające podczas zderzenia są siłami zachowawczymi i wobec tego energia mechaniczna cząsteczek pozostaje stała, 4. Siły działają tylko w momencie zderzenia się cząsteczek gazu. Cząsteczki oddalone od siebie nie działają na siebie żadnymi siłami, 5. Objętość cząsteczek gazu jest zaniedbywalnie mała w porównaniu z objętością zajmowaną przez gaz.
Rozkład Maxwella. Ten angielski fizyk na podstawie założeń teorii kinetycznej gazu wyprowadził prawo rozkładu wartości prędkości poruszających się cząsteczek. Ma ono postać: 
nosi nazwę prędkości najbardziej prawdopodobnej . Funkcja f(v) określa prawdopodobieństwo , że na ogólną liczbę cząsteczek N, liczba dN cząsteczek ma prędkości zawarte w elementarnym przedziale od v do v+dv. Zatem ![]()
I zasada termodynamiki. Zmiana energii wewnętrznej układu termodynamicznego jest równa sumie ciepła pobranego (lub oddanego) przez układ i pracy wykonanej nad układem przez siły zewnętrzne (lub przez układ nad otoczeniem). U2 - U1 = Q + W , gdzie U1 - energia wewnętrzna układu w stanie początkowym , U2 - energia wewnętrzna w stanie końcowym, Q- energię pobraną(lub oddaną) przez układ w wyniku wymiany ciepła , W- energię pobraną (lub oddaną) przez układ w wyniku wykonania pracy przez siły zewnętrzne.
II zasada termodynamiki. Wg Plancka: Niemożliwe jest zbudowanie maszyny cieplnej działającej cyklicznie , która oziębiałaby zbiornik ciepła i wykonywała pracę nie powodując żadnych zmian w przyrodzie. Wg Clausiusa: żadna pracująca cyklicznie maszyna nie może bez zmian w otoczeniu przenosić w sposób ciągły ciepła z jednego ciała do drugiego o wyższej temperaturze.
Entropia. Do scharakteryzowania termodynamicznych procesów należy nową wielkość , zwaną entropią S. Entropia jest termodynamiczną funkcją nie zależną od drogi przejścia od jednego stanu do drugiego, a zależną tylko od początkowego i końcowego stanu układu. A więc entropia jest funkcją stanu określoną dla stanów równowagi i taką, że w procesie kwazistatycznym ![]()
. Jednostką entropii jest dżul/kelwin(J/K). Drugą zasadę termodynamiki można sformułować następująco: Entropia układów termodynamicznych jest jednoznaczną funkcją stanu tych układów.
Cykl Carnotta. Silnik Carnota jest to silnik , którego teoretyczna sprawność jest większa niż sprawność spalania wewnętrznego, posiada największą sprawność. Seria procesów w nim zachodzących nazywamy cyklem Carnota. Silnik ten posiada cztery cykle:
1)PaVa=PbVb -rozprężanie izotermiczne, 2)![]()
- rozprężanie adiabatyczne,
3)PcVc=PdVd - sprężanie izotermiczne, 4)![]()
- sprężanie adiabatyczne.
Ciśnienie w cieczy i gazie . Prawo Pascala.
Ciecze i gazy noszą łączną nazwę płynów . Ciśnienie płynu można scharakteryzować wielkością siła działających na siebie poszczególnych warstw płynu lub na stykające się z nimi ciała . Stosunek siły parcia na dowolną powierzchnię w płynie do wielkości tej powierzchni nazywamy ciśnieniem . Jednostką ciśnienia jest paskal (Pa). Jest to ciśnienie jakie wywiera siła jednego niutona na powierzchnię 1 m2 -- ![]()
Zjawisko to opisuje prawo Pascala, które można sformułować następująco: Ciśnienie zewnętrzne wywierane na ciecz lub gaz jest przenoszone we wszystkich kierunkach jednakowo.
p = po + δgh , gdzie δ gęstość cieczy, g - przyspieszenie ziemskie, h- głębokość mierzonego ciśnienia, po ciśnienie na powierzchni.
Prawo Archimedesa. Na ciało zanurzone w cieczy działa siła wyporu równa ciężarowi wypartej przez to ciało cieczy.
Pływanie ciał. Na każde ciało zanurzone w cieczy działa siła wyporu W = Vgδo i siła ciężkości Q = Vgδ - gdzie δo i δ oznaczają odpowiednio gęstość cieczy i średnią gęstość ciała niejednorodnego . Wypadkowa tych dwóch sił wyraża się wzorem R = W-Q = Vg(δo -δ).
Mogą tu wystąpić trzy przypadki: 1) δ>δo wówczas wypadkowa siła R<0 ciało będzie tonąć.
2) δ=δo - wówczas R=0 ciało będzie znajdować się w równowadze z cieczą na dowolnej głębokości zanurzenia, 3) δ<δo wówczas R>0 ciało będzie pływać częściowo zanurzone.
Przepływ płynu. Ruch płynów nazywamy przepływem , a uporządkowany ruch cząsteczek płynów poruszających się w jednym kierunku strumieniem lub strugą . Przepływ nazywamy laminarnym, jeżeli strumień płynu może być rozłożony na warstwy , których wektor prędkości jest równoległy do kierunku przepływu. Przepływ płynu nazywamy turbulentnym , jeżeli zachodzi mieszanie się poszczególnych warstw płynu . W ruchu turbulentnym dla różnych warstw płynu pochodne prędkości względem czasu ![]()
. Jeżeli w danym punkcie przestrzeni prędkość przepływającego płynu nie zależy od czasu , to przepływ taki nazywamy ustalonym lub stacjonarnym.
![]()
Związek ten nosi nazwę równania ciągłości, z którego wynika , że prędkości cieczy w strudze są odwrotnie proporcjonalne do powierzchni przekrojów strugi.
![]()
. Równanie to nosi nazwę równania Bernoulliego. Dzieląc stronami powyższe równanie przez objętość V i podstawiając za m/V gęstość cieczy ![]()
otrzymamy postać równania następującą ![]()
. Na podstawie tych dwóch równań możemy sformułować prawo Bernouliego następująco : Suma energii kinetycznej, potencjalnej i ciśnienia jednostki masy (lub jednostki objętości) ustalonego przepływu cieczy doskonałej jest wielkością stałą.
Prawo Culomba.
Dwa nieruchome punktowe ładunki elektryczne odpychają się lub przyciągają z siłą proporcjonalną do iloczynu tych ładunków, a odwrotnie proporcjonalną do ich odległości.
Wyrazimy to przy pomocy równania:
![]()
gdzie q1 i q2 są wielkościami skalarnymi określającymi wielkość i znak ładunków. Wielkość F12 jest silą działającą na ładunek, zaś wektor r12 jest skierowany od ładunku q2 do q1.
W układzie jednostek SI stałą k można zapisać w postaci:

gdzie εo=0.8859*10-11 jest przenikalnością próżni.
Stała εr występująca we wzorze nosi nazwę względnej przenikalności elektrycznej ośrodka i wyraża się liczbą niemianowaną. Znając εo i εr możemy określić przenikalność elektryczną ε każdego ośrodka materialnego: ε = εoεr
Natężenie pola elektrycznego.
Przestrzeń otaczająca ładunki elektryczne posiada taką właściwość, że na umieszczone w dowolnym jej punkcie inne ładunki działa siła. Mówimy, że wokół ładunków elektrycznych istnieje pole elektryczne.
Istnienie pola elektrycznego można wykryć wprowadzają do przestrzeni w której ono działa ładunek próbny q0. W polu elektrycznym na ładunek próbny działa siła![]()
. Umożliwia to wprowadzenie pojęcia: natężenia pola elektrycznego.
Natężenie pola elektrycznego![]()
definiuje się jako stosunek siły![]()
, działającej na dodatni ładunek próbny q0, do wartości tego ładunku.

Natężenie pola elektrycznego jest wektorem. W każdym punkcie przestrzeni wektor ![]()
może mieć inną wartość i inny kierunek. Jednostką natężenia pola w układać SI, wynikającą ze wzoru powyżej jest [N/C], jednakże w praktyce przyjęło się używać jednostki równoważnej [V/m]. ![]()
Obliczenie natężenia pola elektrycznego w dowolnym punkcie przestrzeni jest w zasadzie możliwe zawsze, jeżeli znamy rozkład ładunków wytwarzających to pole. Z prawa Coulomba i definicji pola elektrycznego możemy wyznaczyć natężenie pola elektrycznego wytworzonego przez ładunek punktowy q.
Ze wzoru powyżej wynika, że na ładunek q0 znajdujący się w polu elektrycznym działa
siła ![]()
= q0![]()
. Siła ta może wykonać pracę przesuwając ładunek. Elementarna praca wykonywana przez siłę elektryczną przy przesunięciu ładunku na elemencie drogi d![]()
wynosi
dW = ![]()
d![]()
= q0![]()
d![]()
. Praca sił pola elektrycznego na drodze między punktami A i B wyrazi się zatem wzorem 
Można wykazać, że pole elektrostatyczne, tzn. takie które nie zmienia się w czasie, jest polem potencjalnym, czyli że siły elektryczne są. siłami zachowawczymi. Oznacza to, że wartość pracy wAB nie zależy od wyboru drogi między punktami A i B. Z własności sił potencjalnych wiadomo też, że praca takich sił na drodze zamkniętej jest równa zeru. Powyższe sprawdzimy dla najprostszego przypadku przesuwania ładunku próbnego q0 w polu ładunku punktowego Q po drodze ABCDA. Odcinki AB i CD tej drogi leżą na liniach sił pola, odcinki BC i DA - na łukach kół, które w każdym swym punkcie są prostopadłe do linii sił. Praca sił pola na odcinku AB jest równa co do wartości, lecz przeciwna co do znaku względem pracy wykonanej na odcinku CD. Prace na odcinkach BC i AD są równe zeru ze względu na prostopadłość kierunków siły i przesunięcie. A zatem całkowita praca na drodze zamkniętej ABCDA jest równa zeru. Zdefiniujemy obecnie napięcie elektryczne uAB między punktami A i B, mianowicie ![]()
co słownie można wyrażać następująco: Napięciem elektrycznym między punktami A i B nazywamy stosunek pracy WAB wykonanej przy przesunięciu ładunku q0 z punktu A do B do wielkości tego ładunku. Należy podkreślić, że niezależność pracy od kształtu drogi umożliwia jednoznaczne określenie napięcia między danymi punktami A i B, Przejdziemy teraz do określenia potencjału: Potencjałem danego punktu A nazywamy napięcie między punktem A i punktem nieskończenie odległym.
Zatem potencjał VA jest związany z pracą przesunięcia ładunku q0 od punktu A do nieskończoności. ![]()
Aby uzyskać zależność między napięciem a potencjałem rozważmy pracę wykonaną na drodze od punktu A do nieskończoności, a następnie od nieskończoności do B. Praca ta wynosi
![]()
Z drugiej strony, ponieważ praca nie zależy od wyboru drogi, musi być ona równa pracy na odcinku AB, czyli: ![]()
Z porównania ostatnich dwóch związków wynika, że
![]()
czyli: Napięcie między dwoma punktami pola elektrycznego równa się różnicy potencjału tych punktów. Z wzorów definicyjnych napięcia elektrycznego i potencjału wynika, że napięcie i potencjał mają wspólną jednostkę. ![]()
Prawo Gaussa dla pola elektrycznego.
Prawo Gaussa-Oslrogradskicgo, zwane też krótko prawem Gaussa, dotyczy zależności strumienia pola elektrycznego przechodzącego przez dowolną zamkniętą powierzchnię S od ogólnego ładunku znajdującego się wewnątrz obszaru objętego tą powierzchnią. Dowód prawa Gaussa podamy dla powierzchni kulistej o promieniu R , w środku której znajduje się ładunek +Q. Linie sił wychodzą radialnie z tego ładunku i przecinają prostopadle powierzchnię kuli. Natężenie pola E w dowolnym punkcie tej powierzchni zgodnie z wzorem równa się: ![]()
Strumień pola elektrycznego przez powierzchnię kuli wynosi zatem:
![]()
czyli![]()
We wzorze wektory E i ds są w każdym punkcie na powierzchni kuli równoległe do siebie, a symbol ![]()
oznacza całkowanie po powierzchni zamkniętej (jaką jest powierzchnia kulista).Jak widać z wzoru całkowity strumień pola elektrycznego nie zależy od promienia kuli, przez którą przechodzi, a zależy jedynie od ładunku Q znajdującego się wewnątrz i od przenikalności elektrycznej ośrodka. Można udowodnić, ze wzór Gaussa nie zmienia swej postaci przy zastąpieniu kuli dowolną zamkniętą powierzchnią S. Jeżeli wewnątrz zamkniętej powierzchni S znajduje się N ładunków Q1,Q2,Q3...QN (dodatnich i ujemnych), to całkowity strumień elektryczny przechodzący przez tę powierzchnię wynosi: ![]()
gdzie ![]()
Jeżeli powierzchnia zamknięta obejmuje ładunki dodatnie i ujemne w takiej ilości, że ich suma algebraiczna równa się zeru, to całkowity strumień elektryczny przez tę powierzchnię równa się zeru. Ostatecznie prawo Gaussa dla pola elektrycznego możemy sformułować następująco: Całkowity strumień pola elektrycznego ![]()
przez dowolną powierzchnię zamkniętą S jest równy algebraicznej sumie Q ładunków zawartych wewnątrz tej powierzchni pomnożony przez czynnik ![]()
Prąd stały i prawa Ohma i Kirchoffa.
Przez przepływ prądu elektrycznego rozumiemy ruch ładunków elektrycznych. Czynnikiem wywołującym ten ruch jest istnienie napięcia, czyli różnicy potencjałów.
W każdym zamkniętym obwodzie prądu można wyróżnić źródło (czyli tzw. część wewnętrzną obwodu) wytwarzające różnicę potencjałów między dwoma biegunami, dodatnim i ujemnym, oraz odbiorniki prądu (czyli tzw. część zewnętrzną obwodu, utworzoną
z przewodników elektryczności).
Zgodnie z tradycją, za kierunki prądu w obwodzie zewnętrznym przyjmuje się kierunek od potencjału wyższego - dodatniego, do niższego - ujemnego, czyli za umowny kierunek prądu przyjmuje się kierunek ruchu ładunków dodatnich.
W czasie przepływu prądu przez przewodniki metalowe mamy do czynienia z ruchem swobodnych elektronów, a więc nośników prądu poruszających się od potencjału niższego do wyższego, czyli w kierunku przeciwnym do umownie przyjętego. W elektrolitach wchodzących w skład zewnętrznej części obwodu mamy do czynienia z ruchem jonów dodatnich (tzw. kationów) do elektrody ujemnej (katody) i jonów ujemnych (tzw. anionów) do elektrody dodatniej (anody). W tym przypadku mówimy o prądzie jonowym- W półprzewodnikach może występować przewodnictwo elektronowe oraz dziurowe . W gazach występuje zarówno przewodnictwo jonowe, jak i elektronowe.
Przez natężenie prądu elektrycznego (zwanego też krótko prądem elektrycznym) rozumiemy stosunek ładunku przepływającego przez poprzeczny przekrój przewodnika do czasu przepływu: ![]()
gdzie I oznacza natężenie prądu elektrycznego, Q - ładunek elektryczny, t - czas przepływu. W przypadku prądu stałego, tj. prądu płynącego w jednym kierunku, gdy jego natężenie jest stałe w czasie ![]()
. Jednostką natężenia prądu elektrycznego jest amper [A].
Prawo Ohma . Prawo Ohma mówi o prostej proporcjonalności prądu I płynącego przez przewodnik do napięcia U przyłożonego na jego końcach. ![]()
gdzie R oznacza współczynnik proporcjonalności zwany oporem elektrycznym przewodnika. Równanie powyżej przedstawia matematyczny zapis prawa Ohma.
Prawo Ohma mówi, że stosunek napięcia U między dwoma punktami przewodnika do należenia I przepływającego przezeń prądu jest wielkością siała (R) i nie zależy ani od napięcia U, ani od natężenia I prądu. Opór elektryczny R (zwany też rezystancją) wyrażany jest w omach [Ω].
Opór przewodnika R równa się l omowi, jeżeli niezmienne napięcie U równe l woltowi istniejące na końcach przewodnika wywołuje w nim prąd I o natężeniu l ampera.
Prawa Kirchoffa. Pierwsze prawo Kirchoffa mówi, że w dowolnym punkcie W obwodu (w węźle) suma algebraiczna natężeń prądów stałych dopływających i odpływających do węzła równa się zeru.![]()
Natężenie prądów dopływających do węzła uważamy za dodatnie, natężenie prądów odpływających za ujemne. Innymi słowy, w żadnym punkcie obwodu ładunki się nie gromadzą, nigdzie też nie giną, ani nic powstają (zasada zachowania ładunku). Ile ładunków do węzła dopływa, tyle w tym samym czasie z niego odpływa:
![]()
Drógie prawo Kirchoffa mówi, że w dowolnie wydzielonej zamkniętej części obwodu elektrycznego, w tzw. oczku, suma algebraiczna wszystkich napięć elektrycznych panujących na poszczególnych elementach oczka równa się zeru. Bierzemy tu pod uwagę wszystkie czynne siły elektromotoryczne (SEM) E, jak również wszystkie istniejące w tej części obwodu spadki napięć IR. ![]()
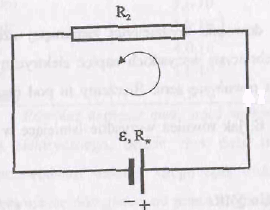
Przy zastosowaniu wzoru powyżej trzeba pamiętać o regule znaków, przypisującej znaki plus lub minus iloczynom IR oraz siłom elektromotorycznym źródeł prądu. Dowolny węzeł oczka) przyjmujemy za punkt początkowy obiegu i w środku oczka zaznaczamy wybrany dowolnie kierunek obiegu, np. zgodnie z ruchem wskazówki zegara. Na tych odcinkach oczka, gdzie kierunek prądu jest zgodny z wybranym kierunkiem obiegu, iloczyn IR traktujemy jako dodatnie (np. +I1R1, lecz -I3R3). Siłom elektromotorycznym przypisujemy znak plus, gdy kierunek od bieguna dodatniego do ujemnego jest zgodny z wybranym kierunkiem obiegu.
W odniesieniu do najprostszego obwodu pojedynczego ogniwa o sile elektromotorycznej E i oporze wewnętrznym Rw zamkniętego oporem zewnętrznym Rz drugie prawo Kirchoffa przyjmuje postać : ![]()
stąd ![]()
Prąd w cieczach ,mechanizm przewodzenia, elektroliza.
Elektrolity
Czyste ciecze (z wyjątkiem roztopionych metali) są. złymi przewodnikami prądu elektrycznego. Stają się one dobrymi przewodnikami po rozpuszczeniu w nich kwasów, zasad i soli. Takie roztwory nazywamy elektrolitami. Czysta woda np. w temperaturze pokojowej
ma opór właściwy p= 2,5 105 Ωm, po rozpuszczeniu zaś w niej chlorku potasu KCl w stężeniu odpowiadającym jednej cząsteczce KCl na pięćset tysięcy cząsteczek wody opór właściwy maleje do p = 7Ωm, a więc 35 000 razy. Oznacza to, że w roztworze wodnym siły wiązań chemicznych cząsteczek rozpuszczalnych w wodzie ulegają osłabieniu. W takich warunkach cząsteczka AB, składająca się z dwóch różnych pierwiastków A i B, pod wpływem ruchów termicznych cząstek elektrolitu zostaje rozerwana na cząstkę dodatnio naładowaną A+ - kation i ujemnie naładowaną B- - anion. Proces taki nazywamy dysocjacją.
Proces odwrotny - łączenie się anionów i kationów w cząstki obojętne - nazywamy rekombinacją. Oba te procesy możemy opisać równaniem: AB↔A+ + B-
Elektrolity są to zatem roztwory (przede wszystkim wodne) kwasów, zasad i soli.
W wyniku przepływu prądu elektrycznego przez, elektrolity na elektrodzie ujemnej -katodzie - wydzielają się takie substancje jak wodór, metale oraz grupy takie jak NH4. Na elektrodzie dodatniej - anodzie - wydzielają się: tlen, reszty kwasowe oraz grupa OH. Wydzielanie się substancji w wyniku przepływał prądu przez elektrolit nazywamy elektrolizą.
Elektroliza
Przy przepływie prądu elektrycznego przez elektrolit na elektrodach woltametru (czyli naczynia, w którym odbywa się elektroliza) wydzielają się substancje chemiczne. Oznacza to, że w procesie elektrolizy transportowi ładunku towarzyszy transport masy. Z prawa zachowania ładunku wynika, że: do wydzielenia masy jednego mola dowolnego pierwiastka potrzebny jest przepływ ładunku Qo. ![]()
gdzie: N A = 6,02 •1023 [l / mol] - to liczba Avogadra, w - wartościowość danego jonu, e - ładunek elementarny.
Prawo elektrolizy Faradaya
Pierwsze prawo Faradaya wyraża związek między ilością substancji wydzielającej się na elektrodzie, natężeniem prądu i czasem przepływu prądu przez, elektrolit. Prawo to ma następującą prostą treść: masa substancji m wydzielającej się na elektrodzie jest wprost proporcjonalna do należenia prądu I i do czasu jego przepływu t: m=kIt gdzie k oznacza współczynnik proporcjonalności, który zależy tylko od rodzaju wydzielającej się substancji i składu elektrolitu.
Iloczyn natężenia prądu I przez czas t daje ilość ładunku elektrycznego Q, który przepłynął przez elektrolit It=Q skąd można pierwsze prawo Faradaya przedstawić w postaci m = kQ
tj. masa wydzielającej się substancji m jest proporcjonalna do przepływającej przez elektrolit ilości ładunku Q. Współczynnik k nazywa się równoważnikiem elektrochemicznym wydzielanej substancji. Ponieważ dla Q = l mamy m = k więc równoważnik elektrochemiczny równa się liczbowo masie substancji wydzielającej się przy przejściu przez elektrolit jednostki ładunku elektrycznego, czyli l Kulomba
Drugie prawo Faradaya mówi, że współczynniki elektrochemiczne poszczególnych pierwiastków są wprost proporcjonalne do ich równoważników chemicznych.
![]()
Stąd wynika, że jeżeli w procesie elektrolizy, na elektrodzie wydziela się jeden gramorównoważnik substancji (tj. masa m równa liczbowo M/w) to przez elektrolit przepływa ładunek elektryczny Q liczbowo równy stałej F.
Innymi słowy stała Faradaya F równa się liczbowo ilości ładunku elektrycznego Q, który przepływając przez elektrolit, wydziela na elektrodzie jeden gramorównoważnik substancji.
Siła Lorentza
Oddziaływania pola magnetycznego na prąd lub magnes trwały można sprowadzić do elementarnego działania — pola magnetycznego na poruszający się ładunek punktowy. Załóżmy, że w polu magnetycznym porusza się z prędkością ![]()
ładunek próbny q0. Okazuje się, że pole magnetyczne działa na poruszający się ładunek elektryczny siłą ![]()
. Zmieniając prędkość ![]()
ładunku próbnego, można stwierdzić, że niezależnie od kierunku jego prędkości ![]()
, siła ![]()
jest zawsze do niej prostopadła, natomiast wartość bezwzględna siły zależy od wartości i od kierunku prędkości. Zawsze można znaleźć taki kierunek prędkości, aby wartość siły była maksymalna oraz taki kierunek - prostopadły do poprzedniego - aby sila była równa zeru. Zależność siły ![]()
od prędkości ![]()
ładunku próbnego q0 można wyrazić
prostym wzorem, jeśli wprowadzimy wektor ![]()
opisujący pole magnetyczne, zwany wektorem indukcji magnetycznej.
W przestrzeni istnieje pole magnetyczne o indukcji ![]()
, jeżeli na ładunek próbny q0 poruszający się w tej przestrzeni z prędkością ![]()
działa siła ![]()
: ![]()
Zgodnie z definicją iloczynu wektorowego, wartość bezwzględna siły wyraża się wzorem:
![]()
gdzie α to kąt między ![]()
i ![]()
. Wektor ![]()
jest prostopadły do wektorów ![]()
i ![]()
. Wartość siły jest maksymalną, gdy ![]()
⊥![]()
. Gdy wektory ![]()
i ![]()
są do siebie równoległe to siła ![]()
= 0.
Zwróćmy uwagę, że w odróżnieniu od siły elektrycznej siła magnetyczna działa tylko na ładunki w ruchu oraz, że jej kierunek jest zawsze prostopadły do kierunku wektora![]()
. Siłę magnetyczną wyrażoną wzorem![]()
nazywamy często siłą Lorenza, a sam wzór - wzorem Lorenza. Z właściwości iloczynu wektorowego opisującego siłę Lorenza wynika, że trzy wektory ![]()
, ![]()
i ![]()
stanowią taki układ, że siła F jest prostopadła do płaszczyzny wektorów ![]()
i ![]()
, zaś zwrot siły ![]()
określa reguła śruby prawoskrętnej.
Prawo Ampera i wzór Ampera
Obliczmy całkę krzywo liniową ![]()
po konturze zamkniętym C (w naszym przypadku po okręgu o promieniu r) wokół nieskończenie długiego prostoliniowego przewodnika z prądem. Ponieważ linie sił pola magnetycznego pochodzącego od prądu prostoliniowego tworzą w płaszczyźnie prostopadłej do przewodnika okręgi koncentryczne o środkach leżących na przewodniku. Indukcja ![]()
we wszystkich punktach okręgu jest taka sama i wynosi :![]()
, a kierunek wektora ![]()
pokrywa się ze styczną do okręgu.
Wzór jest również prawdziwy dla konturu zamkniętego C dowolnego kształtu obejmującego przewodnik. Co więcej wynik całkowania jest taki sam, gdy przewodnik (nie jest prostoliniowy) ma dowolny kształt. Jeżeli kontur C nie obejmuje przewodnika z prądem, to cyrkulacja z wektora indukcji ![]()
po tym konturze jest równa zero.
Jeżeli kontur C obejmuje kilka przewodników z prądem to wobec zasady superpozycji pól magnetycznych wzór można zapisać: 
gdzie N- ilość przewodników z prądem obejmowanych przez kontur C . Wzór ten wyraża matematyczną postać prawa Ampera. Całka okrężna (po obwodzie zamkniętym) występująca w tym prawie nosi nazwę cyrkulacji albo krążenia wektora ![]()
.
Wiedząc, że ![]()
= μ.![]()
możemy zapisać: 
W tym przypadku prawo przepływu prądów tzw. prawo Ampera można sformułować następująco: Cyrkulacja wektora natężenia pola magnetycznego jest równa algebraicznej sumie natężeń prądów płynących wewnątrz konturu obejmującego te prądy.
Prawo Biota-Savarta-Laplacea
Laplace sformułował swą hipotezę następująco: Indukcja B w dowolnym punkcie pola magnetycznego dowolnego przewodnika z prądem stanowi wektorową sumę przyczynków indukcji d![]()
pochodzących od elementów d![]()
przewodnika z prądem I. Jest to zasada superpozycji tj. zasada niezależnego działania pól.
Niech CD przedstawia odcinek długiego krzywoliniowego przewodnika, przez który płynie prąd I. Dla obliczenia indukcji magnetycznej ![]()
w punkcie A dzielimy przewodnik na nieskończenie małe elementy d![]()
, traktując je jako wektory o zwrocie zgodnym ze zwrotem I. Jego odległość od punktu A wynosi ![]()
(zwrot wektora ![]()
od elementu przewodnika do punktu A).
Zgodnie z prawem Biota-Savarta-Laplace'a (prawo B-S-L) nieskończenie mały element d![]()
przewodnika z prądem wytwarza w punkcie A odległym od d![]()
o ![]()
indukcję magnetyczną d![]()
a mianowicie:![]()
w postaci skalarnej :![]()
- gdzie α oznacza kąt między wektorem d![]()
i ![]()
. A zatem słownie ujmując : Wartość liczbowa indukcji d![]()
wywołanej przez element dl przewodnika jest proporcjonalna na natężenia prądu I, do długości elementu d![]()
, odwrotnie proporcjonalna do kwadratu odległości r i zależna od kąta a utworzonego przez kierunki d![]()
i ![]()
. d![]()
jest indukcją pola magnetycznego, jakie wytwarza element d![]()
przewodnika z prądem I w odległości ![]()
od tego elementu.
Kierunek i zwrot d![]()
jest zgodny z kierunkiem i zwrotem iloczynu wektorowego d![]()
x ![]()
.
Całkowita indukcja ![]()
wytworzona w punkcie A dzięki przepływowi prądu w całym przewodniku jest sumą geometryczną wektorów d![]()
wytworzonych przez wszystkie elementy d![]()
przewodnika, a zatem ![]()
jest całką wektorową o postaci : 
Współczynnik μ = μoμr we wzorach charakteryzuje magnetyczne właściwości ośrodka, w którym znajduje się przewodnik i nosi nazwę przenikalności magnetycznej, gdzie μr - liczba niemianowana, zwana względną przenikalnością magnetyczną.
Prawo indukcji elekromagnetycznej Faradaya.
Zjawisko indukcji elektromagnetycznej polega na powstawaniu prądów elektrycznych wskutek zmian pola magnetycznego. Aby matematycznie ująć pojęcie indukcji należy wprowadzić pojęcie strumienia indukcji magnetycznej (strumienia magnetycznego) ΦB który wyraża się wzorem ![]()
, w przypadku gdy obwód jest płaski , a pole magnetyczne jednorodne wzór upraszcza się do postaci ![]()
, gdzie α- kąt między kierunkiem B a prostopadła płaszczyzny obwodu. Strumień ten w chwili zamykania i otwierania obwodu pierwotnego zmienia się w czasie , co powoduje powstawanie siły elektromotorycznej SEM odpowiedzialnej za przepływ prądu w tym obwodzie . A więc prawo indukcji Faradaya mówi że: Indukowana w obwodzie SEM indukcji εind jest równa co do wartości bezwzględnej a przeciwna co do znaku prędkości zmiany strumienia magnetycznego ΦB przenikającego przez powierzchnię ograniczoną tym obwodem , czyli :![]()
. Indukcja wzajemna. Jeżeli w jednym obwodzie zmienia się natężenie prądu to zgodnie z prawem indukcji Faradaya w drugim obwodzie znajdującym się w pobliżu pierwszego jest indukowana SEM. Zjawisko to jest nazywane indukcją wzajemną . Oznaczamy symbolem Φ21 , strumień magnetyczny pochodzący od obwodu 1 i przenikający przez obwód 2. Wówczas SEM indukowana w drugim obwodzie wyniesie ![]()
. Strumień Φ21 jest proporcjonalny do indukcji B1 , która na mocy prawa Biota-Savarta jest proporcjonalna do natężenia prądu I1 . Zatem strumień Φ21 jest proporcjonalny do I1 . Oznaczając współczynnik proporcjonalności przez L21 możemy napisać Φ21 = L21I1 , a wzór przyjmuje wówczas postać : ![]()
Samoindukcja(indukcja własna). Występuje w przypadku pojedynczego obwodu . Strumień magnetyczny wytwarzany przez prąd płynący w obwodzie przenika ten obwód, zatem każda zmiana natężenia prądu wywoła w nim powstanie SEM indukcji. Strumień magnetyczny Φ wytwarzany przez obwód i przenikający go proporcjonalny do natężenia prądu I płynącego w tym obwodzie Φ = LI , gdzie L nosi nazwę współczynnika indukcji własnej lub współczynnika samoindukcji. Indukowana SEM wynosi ![]()
.
Uogólnienie prawa Ampera
Liczne doświadczenia wykazały, że powyższe prawo jest również słuszne gdy mamy do czynienia nie tylko z prądem przewodzenia I płynącym przez przewodnik (który jest związany z ruchem przepływu ładunków elektrycznych np. elektronów), ale stosuje się również w przypadku prądu uogólnionego Iu. Prąd uogólniony Iu jest sumą prądu przewodzenia I i prądu przesunięcia Ip związanego ze zmianą w czasie natężenia pola elektrycznego (np. zmianą natężenia pola E w przestrzeni międzyelektrodowej kondensatora podczas jego ładowania lub rozładowywania). Iu = I + Ip
Aby przekonać się, czy między okładkami kondensatora płynie prąd, wystarczy stwierdzić, czy istnieje tam pole magnetyczne. Liczne doświadczenia wykazały, że rzeczywiście między okładkami kondensatora powstaje pole magnetyczne (linie sił tego pola są okręgami, podobnie jak linie pola magnetycznego wokół przewodnika z prądem), przy czym pole to jest wytwarzane przez kondensator tylko wtedy, gdy się on rozładowuje lub ładuje, tzn. gdy zmienia się w czasie natężenie pola elektrycznego E kondensatora.
Wyrazimy obecnie natężenie prądu przesunięcia jako funkcję szybkości zmiany natężenia pola elektrycznego. Ładunek kondensatora zgodnie z wzorem wynosi: Q = εES. Różniczkując ten wzór względem czasu, otrzymujemy: ![]()
Oznaczając : ![]()
oraz wiedząc, że εdE•S = dΦD,S, możemy zapisać ![]()
Jak widzimy z wzoru powyżej prąd przesunięcia jest to po prostu szybkość zmian strumienia indukcji magnetycznej.
Korzystając z prądu uogólnionego , prawo Ampera możemy ostatecznie zapisać w postaci: 
.
Równania Maxwella przedstawia się bądź w postaci całkowej, bądź w postaci różniczkowej. Równaniem całkowymi Maxwella są (już przez nas uprzednio wprowadzone) następujące: • uogólnione prawo indukcji elektromagnetycznej Faradaya,
• uogólnione prawo przepływu prądów Ampera ,• prawo Gaussa dla pola elektrycznego i
• prawo Gaussa dla pola magnetycznego . W tabeli zestawiono wszystkie cztery równania Maxwella wraz z objaśnieniami, jakich zjawisk one dotyczą. W celu uzyskaniu pełnego układu równań Maxwella należy do czterech ww. równań dołączyć jeszcze dwa podstawowe związki między dwoma wektorami elektrycznymi i magnetycznymi: ![]()
Równania Maxwella stanowią fundamentalną podstawę teorii zjawisk elektromagnetycznych, podobnie jak zasady dynamiki Newtona są podstawą mechaniki.
Lp. |
Równanie |
Nazwa |
Fakty doświadczalne |
1 |
|
uogólnione prawo indukcji Faradaya |
zmienne pole magnetyczne wytwarza wirowe pole elektryczne, które może wywołać prąd elektryczny |
2 |
|
uogólnione prawo przepływu prądów Ampere 'a |
prąd elektryczny lub zmienne pole elektryczne wytwarza wirowe pole magnetyczne |
3 |
|
prawo Gaussa dla pola elektrycznego |
ładunek wytwarza pole elektryczne o indukcji odwrotnie proporcjonalnej do kwadratu odległości |
4 |
|
prawo Gaussa dla pola magnetycznego |
nie istnieje w przyrodzie ładunek magnetyczny, linie indukcji sąkrzywymi zamkniętymi |
Spis treści .
Wielkości układu SI st.1
Ruch prostoliniowy jendostajny , zmienny, jednostajnie zmienny , krzywoliniowy st.2
Ruch po okręgu st. 3
Inercialny układ odniesienia , Transformacja Galileusza , I zasada dynamiki st. 3
II i III zasada dynamiki st. 4
Pęd, popęd siły zasada zachowania pędu , moment pędu , siła Coriolisa st.4
Nieinercialny układ odniesienia, transformacja Lorentza , czasoprzestrzeń st.5
Dodawanie prędkości wg Einsteina st.5
Równanie masy i energii E=mc2 st. 6
Ciężar ciała, przyspieszenie ziemskie st. 6
Pole grawitacyjne , natężenie , potencjał , praca w polu gra. st. 7
Temperatura, ciepło , równanie gazu doskonałego , gaz rzeczywisty st. 7
Kinetyczna teoria gazu doskonałego, rozkład Maxwella st. 8
I i II zasada termodynamiki, entropia , cykl Carnotta st. 8
Ciśnienie, prawo Pascala, Archimedesa, pływanie ciał, przepływ płynu, równanie Bernouliego, prawo Culomba st. 9
Natężenie pla elektrycznego st. 10
Napięcie elektryczne st. 11
Prawo Gaussa dla pola elektrycznego st. 11
Prąd stały, prawo Ohma i I prawo Kirchoffa st. 12
Drugie prawo Kirchoffa, elektroliza, prawo elektrolizy Faradaya st. 13
Siła Lorentza st. 14
Prawo i wzór Ampera, prawo Biota-Savarta-Laplacea st. 15
Prawo indukcji elektromagnetycznej Faradaya, indukcja wzajemna, samoindukcja st. 16
Uogólnione prawo Ampera st. 16
Równania Maxwella st. 17
16
Wyszukiwarka