1.OMÓWIĆ ZAŁOŻENIA FIZYCZNE DLA SFORMUŁOWANIA DYNAMICZNEGO MODELU OBWODOWEGO MASZYNY ELEKTRYCZNEJ:
ZASADA MINIMALNEJ PRACY...
INTERAKCJA DWÓCH PRZEPŁYWÓW....
TYPY MASZYN ELEKTRYCZNYCH RÓŻNIĄ....
ZAŁOŻENIA FIZYCZNE FORMUŁOWANIA MODELU MASZYNY ELEKTRYCZNEJ:
ZASADA MINIMALNEJ PRACY-SKŁONNOŚĆ ZWIĘKSZANIA CAŁKOWITEGO STRUMIENIA MAGNETYCZNEGO SPRZĘŻONEGO Z UKŁADEM-TENDENCJA DO MAGAZYNOWANIA MAKSYMALNEJ ENERGII W UKŁADZIE
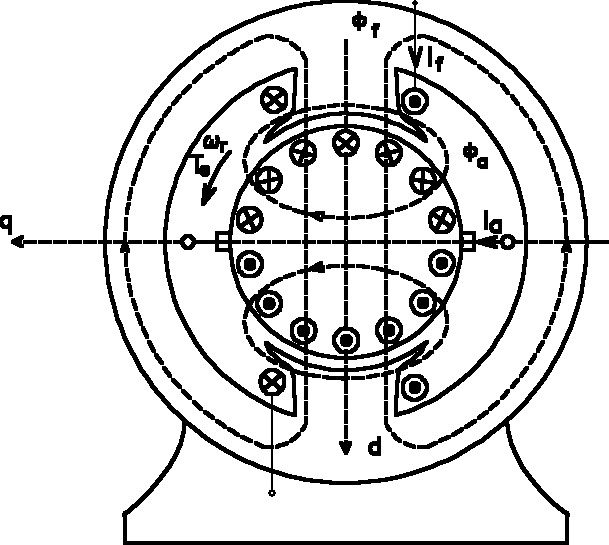
RYS. 1. PODSTAWOWE UKŁADY GENERACJI MOMENTU OBROTOWEGO: a)maszyna synchroniczna wydatnobiegunowa; b)m. prądu stałego; d)m. indukcyjna.
INTERAKCJA DWÓCH PRZEPŁYWÓW (PÓL) NIERUCHOMYCH WZGLĘDEM SIEBIE W PRZESTRZENI DLA USTALONEGO STANU PRACY
POSZCZEGÓLNE TYPY MASZYN RÓŻNIĄ SIĘ MIĘDZY SOBĄ TYLKO SPOSOBEM STEROWANIA POŁOŻENIEM PRZEPŁYWÓW (PÓL)
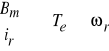
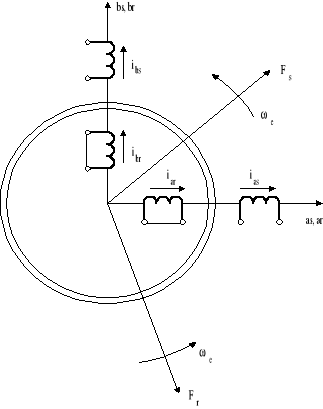
2. SFORMUŁOWAĆ PODSTAWOWE PRAWO STEROWANIA MASZYN ELEKTRYCZNYCH NARYSOWAĆ UKŁADY PRZEPŁYWÓW STOJANA Fs I WIRNIKA Fr DLA NASTĘPUJĄCYCH MASZYN:
PRĄDU STAŁEGO
SYNCHRONICZNEJ
INDUKCYJNEJ (ASYNCHRONICZNEJ)
Dwa pola są nieruchome względem siebie, wytwarzają max. moment.
Teśr≠0
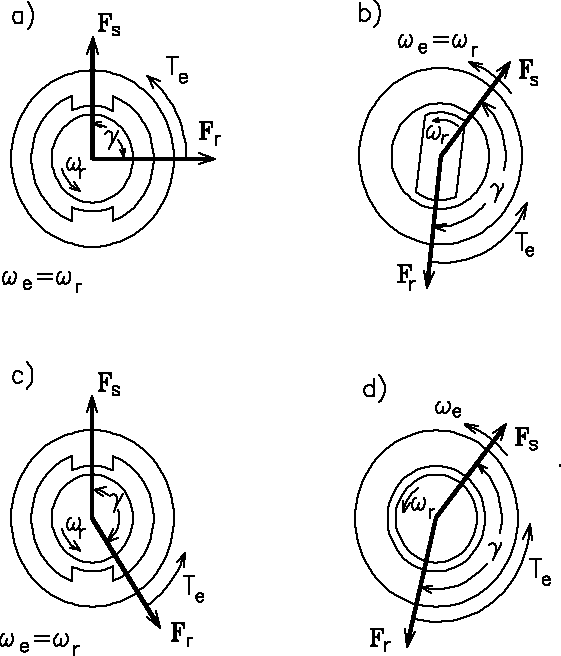
RYS. 1. UKŁADY PRZEPŁYWÓW STOJANA Fs I WIRNIKA Fr :
a) maszyna prądu stałego; b) maszyna synchroniczna; c) odwrócona maszyna synchroniczna; d) maszyna indukcyjna (asynchroniczna)
3. NARYSOWAĆ ELEMENTARNE UKŁADY GENERACJI NIERUCHOMEGO POLA WIRNIKA OPISAĆ DZIAŁANIE ELEMENTARNEGO REGULATORA POŁOŻENIA POLA WIRNIKA.
Komutator-elementarny regulator położenia pola wirnika.
RYS. 1. MODEL ELEMENTARNEGO ELEKTROMECHNICZNEGO REGULATORA POŁOŻENIA POLA WIRNIKA
Działanie komutatora:
Niezależnie od tego czy pod biegunem N (górnym) znajduje się bok a` zwoju wirnika (rys.a)), czy bok a, szczotka A przylegająca do wycinka a` komutatora , drugi raz do wycinka a jest zawsze dodatnia (+) i dlatego, mimo ciągłej zmiany biegunowości napięcia w zwoju, a także zmiany zwrotu prądu w zwoju, biegunowości zacisków A i B jest stała, zatem prąd płynący w obwodzie zewnętrznym ma stały zwrot. Szczotka A „sonduje” miejsce pod biegunem N (górnym), szczotka B „sonduje” miejsce pod biegunem S.
4. NARYSOWAĆ ELEMENTARNE UKŁADY GENERACJI WIRUJĄCEGO POLA STOJANA OPISAĆ DZIAŁANIE DWUFAZOWGO REGULATORA POŁOŻENIA POLA STOJANA.
Prędkość pola jest równa pulsacji prądu (w maszynie indukcyjnej i synchronicznej).
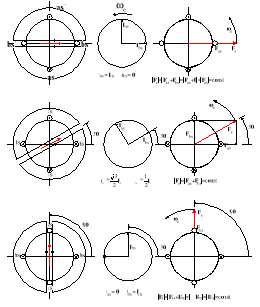
RYS. 1. MODEL ELEKTROMAGNETYCZNEGO REGULATORA POŁOŻENIA POLA STOJANA
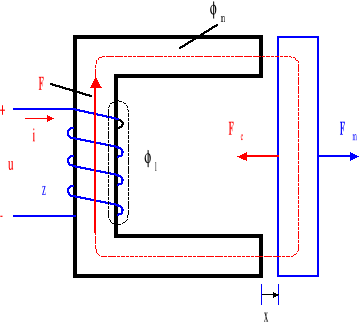
5. WZORCOWE (IDEALNE) SPRZĘŻENIE TRANSFORMATOROWE: OPISAĆ JEGO MODEL FIZYCZNY I DYNAMICZNY SCHEMAT ZASTĘPCZY.
*SPRZĘŻENIE TRANSFORMATOROWE
Wspólnie magnesują rdzeń.
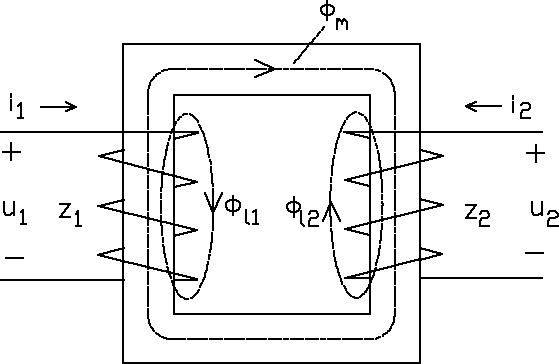
RYS. 1. MODEL FIZYCZNY SPRZĘŻENIA TRANSFORMATOROWEGO - TRANSFORMATOR JEDNOFAZOWY
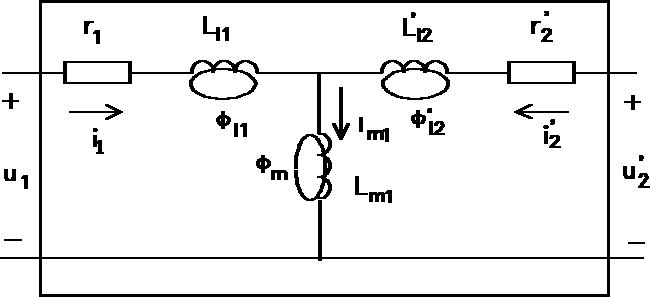
RYS. 2. DYNAMICZNY SCHEMAT ZASTĘPCZY SPRZĘŻENIA TRANSFORMATOROWEGO
E1m=(1/)*ωe*λm=(1/)*2Π*fe*z1*Φm=4.44*f1*z1*Φm
*SPRZĘŻENIE TRANSFORMATOROWE (KOMENTARZ DO RYS. 1 ORAZ RYS. 2 )
(1)
(2)
(3) (4)
(5)
(6)
(7)
![]()
(8)
![]()
(9)
![]()
(10)
ZAMIANA ZMIENNYCH i LICZBY ZWOJÓW STRONY WTÓRNEJ
![]()
(11)
PRZEZWOJENIE UZWOJENIA STRONY WTÓRNEJ NA NOWĄ LICZBĘ ZWOJÓW ![]()
ALE ![]()
(12)
ZATEM ![]()
(13) ![]()
(14)
STĄD PO ZAMIANIE ZMIENNYCH RÓW. (5), (6) I (7) PRZYJMĄ POSTAĆ
(15)

(16)
RÓWNANIOM (15) I (16) ODPOWIADA SCHEMAT ZASTĘPCZY Z RYS. 2
*INDUKCYJNOŚCI ROZPROSZENIA I MAGNESOWANIA:
SKŁADOWE STRUMIENIA WZBUDZANEGO SMM F
INDUKCYJNOŚĆ ROZPROSZENIA Ll
INDUKCYJNOŚĆ MAGNESOWANIA Lm
RYS. 7A. DYNAMICZNY SCHEMAT ZASTĘPCZY SPRZĘŻENIA TRANSFORMATOROWEGOUKŁAD UZWOJEŃ JEDNOFAZOWYCH STOJANA I WIRNIKA
λas=Lls*ias+Lms*(ias+i`ar) λ`ar=L`lr*i`ar+Lms*(ias+i`ar)
Uas=ras*ias+dλas/dt U`ar=r`ar*i`ar+dλ`ar/dt
RYS. 6. MODEL FIZYCZNY SPRZĘŻENIA TRANSFORMATOROWEGOUKŁAD UZWOJEŃ JEDNOFAZOWYCH STOJANA I WIRNIKA-ROZPŁYW STRUMIENI SKOJARZONYCH I ODPOWIADAJĄCE IM INDUKCYJNOŚCI
*SCHEMAT BLOKOWY
RYS. 7B. SCHEMAT BLOKOWY SPRZĘŻENIA TRANSFORMATOROWEGO
Schemat dotyczy SPS-bocznikowego.
6.WZORCOWE (IDEALNE) SPRZĘŻENIE ELEKTROMECHANICZNE: OPISAĆ JEGO MODEL FIZYCZNY I DYNAMICZNY SCHEMAT ZASTĘPCZY.
**WZORCOWE (IDEALNE) SPRZĘŻENIE ELEKTROMECHANICZNE:
Obwody ruchome - wytwarzają pole prostopadłe względem siebie.
Maszyny prądu stałego
RYS. 1. MODEL FIZYCZNY WZORCOWEGO SPRZĘŻENIA ELEKTROMECHANICZNEGO-MASZYNY PRĄDU STAŁEGO
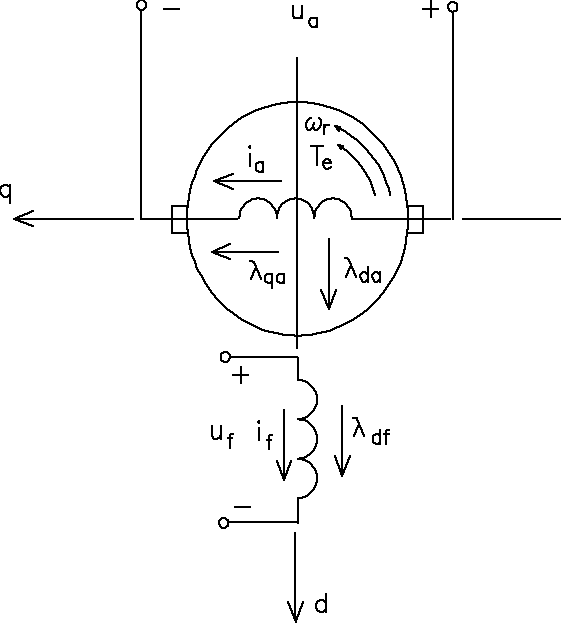
RYS. 2. MODEL OBWODOWY WZORCOWEGO SPRZĘŻENIA ELEKTROMECHANICZNEGO (MASZYNY PRĄDU STAłEGO) W UKłADZIE OSI NATURALNYCH qd STOJANA I WIRNIKA
Uzwojenie jakby nieruchome.
*CIĄG LOGICZNY TRANSFORMACJI SYGNAŁÓW:
(1) (2)
(1) - zamiana sygnałów elektrycznych na mechaniczne
*RÓWNANIA MOMENTU ELEKTROMAGNETYCZNEGO I SEM ROTACJI:
Fizyka: Maszynowcy:
P - liczba biegunów ; Gaf - indukcyjność rotacji
*DYNAMICZNY SCHEMAT ZASTĘPCZY WZORCOWEGO SPRZĘŻENIA
ELEKTROMECHANICZNEGO:
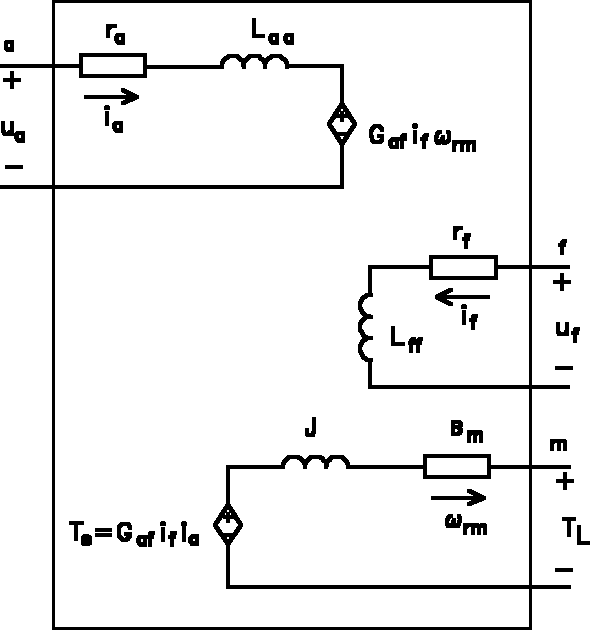
RYS. 3. DYNAMICZNY SCHEMAT ZASTĘPCZY WZORCOWEGO SPRZĘŻENIA ELEKTROMECHANICZNEGO (MASZYNY PRĄDU STAŁEGO)
*STAŁE CZASOWE WZORCOWEGO SPRZĘŻENIA ELEKTROMECHANICZNEGO
τf = Lff / rf
(1) - układ aperiodyczny;
(2) - najlepszy rozruch-najszybciej;
(3) - układ z oscylacjami.
*SCHEMATY BLOKOWE
RYS. 4. SCHEMAT BLOKOWY WZORCOWEGO SPRZĘŻENIA ELEKTROMECHANICZNEGO (MASZYNY PRĄDU STAŁEGO)
RYS. 5. DYNAMICZNY SCHEMAT ZASTĘPCZY WZORCOWEGO SPRZĘŻENIA ELEKTROMECHANICZNEGO (MASZYNY PRĄDU STAŁEGO) dla if = const
7. ZASADA DZIAŁANIA SILNIKA INDUKCYJNEGO:
PODAĆ CIĄG LOGICZNY PRZYCZYNA SKUTEK
WYKAZAĆ, ŻE DLA STANU USTALONEGO PRZEPŁYWY STOJANA

I WIRNIKA
SĄ NIERUCHOME WZGLĘDEM SIEBIE.
*ZASADA DZIAŁANIA SILNIKA INDUKCYJNEGO:
Ciąg logiczny przyczyna - skutek:

![]()
Interakcja pola w szczelinie oraz prądów uzwojeń wirnika
Prędkość kątowa wirnika względem pola w szczelinie maleje
![]()
a) WIRNIK NIERUCHOMY
RYS.2. MODEL OBWDOWY DWUFAZOWEGO SILNIKA INDUKCYJNEGO W OSIACH NATURALNYCH ab
![]()
![]()
b) WIRNIK RUCHOMY
RYS.3. MODEL OBWDOWY DWUFAZOWEGO SILNIKA INDUKCYJNEGO W OSIACH NATURALNYCH ab
OBSERWATOR NA WIRNIKU MIERZY
![]()
![]()
OBSERWATOR NA STOJANIE MIERZY
PRĘDKOŚĆ WŁASNA POLA PRĘDKOŚĆ UNOSZENIA POLA
ALE ORAZ ![]()
ZATEM
8.ZAŁOŻENIA TRANSFORMACJI KOMUTATOROWEJ: OPISAĆ PRZEKSZTAŁCENIE UZWOJENIA RUCHOMEGO (REALNEGO) WIRNIKA MASZYNY INDUKCYJNEJ W UZWOJENIE "JAKBY NIERUCHOME" (KOMUTATOROWE).
*ZAŁOŻENIE TRANSFORMACJI
(REALNEGO) = (KOMUTATOROWEGO)
Przesuwamy cewki by pokryły się osiami
RYS.4. TRANSFORMACJA UZWOJENIA WIRNIKA DO UKŁADU OSI NIERUCHOMYCH STOJANA abS
rzeczywiste: z kapelusza = prąd stojana:
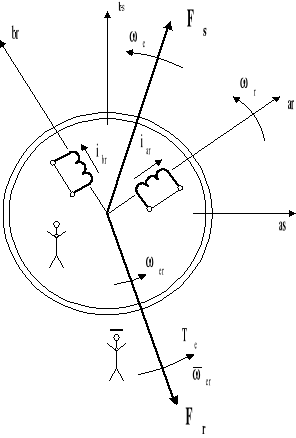
RYS. 5. MODEL OBWODOWY DWUFAZOWEGO SILNIKA INDUKCYJNEGO W UKŁADZIE OSI NIERUCHOMYCH STOJANA abS
9. SCHEMAT ZASTĘPCZY SPRZĘŻENIA TRANSFORMATOROWEGO W MASZYNIE INDUKCYJNEJ: OPISAĆ SEM TRANSFORMACJI INDUKOWANĄ W UZWOJENIU WIRNIKA, NP. W OSI arS.
RYS.6. SEM TRANSFORMACJI W UZW. WIRNIKA W OSI arS
Powyższy schemat zastępczy odwzorowuje równanie powyższe
e'star = d(λ`sar)/dt - nap. transformacji
RYS.7. SEM TRANSFORMACJI UZW. WIRNIKA W OSI brS
e'stbr = d(λ`sbr)/dt - nap. transformacji
10.SCHEMAT ZASTĘPCZY SPRZĘŻENIA ELEKTROMECHANICZNEGO W MASZYNIE INDUKCYJNEJ: OPISAĆ SEM ROTACJI INDUKOWANĄ W UZWOJENIU WIRNIKA I GENEROWANY MOMENT ELEKTROMAGNETYCZNY (PODAĆ ICH ZWROTY, NP. W OSI arS).
RYS.8. SEM ROTACJI I ZWROT MOMENTU ELEKTROMAGNETYCZNEGO W OSI arS
Dopiero ruch powoduje, że pole przecinane jest przez cewki i wytwarzane jest SEM rotacji
RYS.9. SEM ROTACJI I ZWROT MOMENTU ELEKTROMAGNETYCZNEGO W OSI brS
11. OPISAĆ METODĘ WYZNACZANIA MOMENTU ELEKTROMAGNETYCZNEGO GENEROWANEGO W MASZYNIE INDUKCYJNEJ, A NASTĘPNIE WYPROWADZIĆ OGÓLNE RÓWNANIA MOMENTU ELEKTROMAGNETYCZNEGO ORAZ DOKONAĆ ICH INTERPRETACJI FIZYCZNEJ.
MOC ELEKTRYCZNA PRZETWARZANA NA MOC MECHANICZNĄ
(1)
STĄD MOMENT ELEKTROMAGNETYCZNY

(2)
(3)
ZAPIS ILOCZYNEM WEKTOROWYM:
(4)
(5)
UWZGLĘDNIAJĄC ZALEŻNOŚCI NA STRUMIENIE SKOJARZONE Z WIRNIKIEM
(6) lub
(7)
Podstawiając (6) do (4) otrzymamy(8)
ale (9) zatem (10)
lub 
(11)
Podstawiając (7) do (4) otrzymamy (12)
lub 
(13)
uwzględniając (14) można zamienić w (10)
(15)
i następnie otrzymać(16)
lub (17)
Wyszukiwarka