AKADEMIA GÓRNICZO - HUTNICZA
im. Stanisława Staszica w Krakowie
Teoria mechanizmów i maszyn
____________________________________________________________
PROJEKT 1A
Analiza kinematyczna i kinetostatyczna mechanizmu
Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechanika i Budowa Maszyn
Schemat czworoboku:
Zgodnie z numerem i wariantem liczbowym zadania przyjąłem wymiary mechanizmu i położenie jak na rysunku.
AB = 300 mm ω1 = 20 s-1
BC = 600 mm φ1 = 45°
CD = 600 mm
BF = 300 mm
FE =300 mm
DS3 = 300 mm
ANALIZA STRUKTURALNA MECHANIZMU.
RUCHLIWOŚĆ I KLASA MECHANIZMU.
AB - człon napędzający
BC i CD - człony ruchome
Ruchliwość mechanizmu:
n = 3 - liczba członów
p4 = 0 - liczba par kinematycznych czwartej klasy
p5 = 4 - liczba par kinematycznych piątej klasy
w = 3n - 2p5 - p4
w = 3*3 - 2*4 - 0
w = 1
Podział mechanizmu na grupy strukturalne:
Analizowany mechanizm jest mechanizmem klasy II
ANALIZA KINEMATYCZNA MECHANIZMU
MODEL MECHANIZMU W PROGRAMIE AKM
Na podstawie przeprowadzonej analizy strukturalnej ustaliłem, że model mechanizmu musi zawierać człon napędzający oraz grupę oznaczoną w programie AKM symbolem 0-0-0
Człon napędzający:
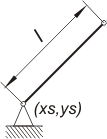
Parametry:
- xs = 0; ys = 0.1
- l = 0.3 [m]
- ω= 20 [1/s]
- kierunek obrotu - w lewo
Grupa strukturalna 2, 3 ( 0-0-0 )
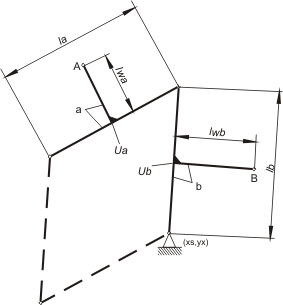
Parametry:
- xs = 0.7; ys = 0
- la = 0.6 [m]
- lb = 0.6 [m]
- lwa = 0.3 [m]
- lwb = 0.001 [m]
- Ua = 0
- Ub = 0
Po ustaleniu wymiarów przeprowadziłem symulację ruchu mechanizmu oraz analizę kinematyczną.
METODA GRAFOANALITYCZNA (METODA PLANÓW)
k1 = 0,001 ![]()
- podziałka rysunkowa mechanizmu.
AB = 0,3 m
BC = 0,6 m
CD = 0,6 m
BF = 0,3 m
FE = 0,3 m
DS3 = 0,3 m
ω1 = 20 s-1
Analiza prędkości.
Prędkość punktu B VB = ω1 * AB = 6 ![]()
Podziałkę prędkości przyjmuję kv = 0,05
Długość wektora prędkości punktu B na rysunku wynosi (VB) = ![]()
=![]()
=120 [mm]
Równanie prędkości punktu C: ![]()
= ![]()
+ ![]()
Równanie prędkości punktu E: ![]()
= ![]()
+ ![]()
![]()
= ![]()
+ ![]()
Plan prędkości:
VC = 2,012 ![]()
VE = 3,4735 ![]()
VCB = 4,679 ![]()
VEB = 3,3345 ![]()
VEC = 3,3085 ![]()
VS3 = 1,006 ![]()
Na podstawie planu obliczyłem:
ω2 = ![]()
= 7,798 [s-1]
ω3 = ![]()
= 3,353 [s-1]
Analiza przyspieszeń
Przyspieszenie punktu B: aB = ![]()
= ![]()
AB = 120 ![]()
Podziałkę przyspieszeń przyjmuję ka = 2
Długość wektora przyspieszeń punktu B na rysunku wynosi: ![]()
= ![]()
= 60 [mm]
Równanie przyspieszeń punktu C: ![]()
+ ![]()
= ![]()
+ ![]()
+ ![]()
Równania przyspieszeń punktu E: ![]()
= ![]()
+ ![]()
+ ![]()
![]()
= ![]()
+ ![]()
+ ![]()
![]()
= ![]()
= ![]()
CD = 6,747 (![]()
) = 3,37 [mm]
![]()
= ![]()
= ![]()
BC = 36,48 (![]()
) = 18,24 [mm]
![]()
= ![]()
= ![]()
EB = 26,22 (![]()
) = 13,1 [mm]
![]()
= ![]()
= ![]()
EC = 25,81 (![]()
) = 12,9 [mm]
plan przyspieszeń:
Z planu przyspieszeń wynika:
|
Na podstawie planu przyspieszeń obliczyłem:
ε2 =
ε3 =
Na podstawie planu przyspieszeń zaznaczyłem zwroty przyspieszeń kątowych członów 2 i 3 na rys. 8. |
2.1.2 ANALIZA KINEMATYCZNA MECHANIZMU - METODA ANALITYCZNA
![]()
+ ![]()
+ ![]()
+ ![]()
+ ![]()
= 0
l1cosφ1 + l2cosφ2 + l3cosφ3 + l4cosφ4 + l5cosφ5 = 0 (1)
l1sinφ1 + l2sinφ2 + l3sinφ3 + l4sinφ4 + l5sinφ5 = 0 (2)
Po podstawieniu wartości liczbowych wzory są następujące:
0,3cos45° + 0,6cosφ2 + 0,6cosφ3 - 0,7 = 0
0,3sin45° + 0,6sinφ2 + 0,6sinφ3 + 0,1 = 0
0,6cosφ2 + 0,6cosφ3 - 0,4879 = 0 |:0,6
0,6sinφ2 + 0,6sinφ3 + 0,3121 = 0 |:0,6
cosφ2 + cosφ3 - 0,8132 = 0
sinφ2 + sinφ3 + 0,5202 = 0
cosφ2 - 0,8132 = -cosφ3 |()2 (3)
sinφ2 + 0,5202 = -sinφ3 |()2
cos2φ2 - 1,6264cosφ2 + 0,6613 = cos2φ3
sin2φ2 + 1,0404sinφ2 + 0,2706 = sin2φ3
+
1 - 1,6264cosφ2 + 1,0404sinφ2 + 0,9319 = 1
-1,6264cosφ2 + 0,0404sinφ2 + 0,9319 = 0 |: (-1,6264)
cosφ2 - 0,6397sinφ2 - 0,5729 = 0
Oznaczam A = -0,5729 oraz B = -0,6397
cosφ2 + Bsinφ2 + A = 0
cosφ2 +A = Bsinφ2 |()2
cos2φ2 + 2Acosφ2 + A2 = B2sin2φ2
sin2φ2 = 1 - cos2φ2
cos2φ2 + 2Acosφ2 +A2 - B2(1 - cos2φ2) = 0
cos2φ2 +2Acosφ2 + A2 - B2 +B2cos2φ2 = 0
(1 + B2)cos2φ2 + 2Acosφ2 + (A2 - B2) = 0
Po podstawieniu w = cosφ2 otrzymuję:
[1 +(-0,6397)2]w2 + 2*(-0,5729)w + [(-0,5729)2 - (-0,6397)2] = 0
1,4092w2 - 1,1458w - 0,081 = 0
∆ = 1,7694
![]()
= 1,3302
w1 = ![]()
= -0,0654
w2 = ![]()
= 0,8785
cosφ2(1) = w1
cosφ2(2) = w2
φ2(1) = arccosw1
φ2(2) = arccosw2
φ2(1) = arccos(-0,0654) = 93,44°
φ2(1) = 360° - 93,44° = 266,56°
φ2(2) = arccos(0,8785) = 28,32°
Kąt φ2(1) = 266,56° dotyczy symetrycznego położenia mechanizmu (linią przerywaną) względem osi przechodzącej przez punkty B i D.
Kąt φ3 wyliczam na podstawie równania (3):
cosφ3(1) = 0,8132 + 0,0654 = 0,8786
cosφ3(2) = 0,8786 = -0,0654
φ3(1) = 28,32°
φ3(2) = 266,56°
Po zróżniczkowaniu równania (1) otrzymuję
-ω1l1sinφ1 - ω2l2sinφ2 - ω3l3sinφ3 = 0 (4)
gdzie ω1 = ![]()
; ω2 = ![]()
; ω3 = ![]()
ω1l1sin(φ1 - φ2) + ω2l2sin(φ2 - φ2) + ω3l3sin(φ3 - φ2) = 0
ponieważ ω2l2sin(φ2 - φ2) = 0 to mogę obliczyć
ω3 = -![]()
po podstawieniu danych liczbowych jest
ω3 = -
= 3,35 [s-1]
Analogicznie obracając układ współrzędnych o kąt φ3 otrzymuję
ω1l1sin(φ1 - φ3) + ω2l2sin(φ2 - φ3) + ω3l3sin(φ3 - φ3) = 0
ω3l3sin(φ3 - φ3) = 0
ω2 = -![]()
po podstawieniu danych liczbowych jest
ω2 = -
= -7,8 [s-1]
W celu obliczenia przyspieszeń kątowych różniczkuję równanie (4) przyjmując ω1 = const
ω12l1cosφ1 + ω22l2cosφ2 + ε2l2cosφ2 + ω32l3cosφ3 +ε3l3sinφ3 = 0
Przyspieszenie kątowe członu 3 otrzymuję obracając układ współrzędnych o kąt φ2
ε3 = -
po podstawieniu danych liczbowych jest:
ε3 = -
ε3 = 291,727 [s-1]
Przyspieszenie kątowe członu 2 otrzymamy obracając układ współrzędnych o kąt φ3
ε2 = -
po podstawieniu danych liczbowych jest:
ε2 = -
ε2 = -209,78 [s-1]
PORÓWNANIE WYNIKÓW ANALIZY KINEMATYCZNEJ
Lp |
Wielkość |
AKM |
Metoda wykreślna |
Metoda analityczna |
1 |
VC |
|
2,012 |
- |
2 |
VE |
3,46 |
3,4735 |
- |
3 |
VS3 |
1,07 |
1,006 |
- |
4 |
ω2 |
7,75 |
7,8 |
7,8 |
5 |
ω3 |
|
3,35 |
3,35 |
6 |
aC |
|
175,14 |
- |
7 |
aE |
189,63 |
195,26 |
- |
8 |
aS3 |
83,24 |
87,57 |
- |
9 |
ε2 |
198,48 |
203 |
209,78 |
10 |
ε3 |
|
293,43 |
291,727 |
ANALIZA KINETOSTATYCZNA
PRZYJĘCIE MAS, MOMENTÓW BEZWŁADNOŚCI ORAZ SIŁY OPORU
OSWOBODZENIE GRUPY STRUKTURALNEJ OD WIĘZÓW
SPRAWDZENIE POPRAWNOŚCI OBLICZEŃ MOMENTU RÓWNOWAŻĄCEGO METODĄ MOCY CHWILOWYCH
m3 = 4 [kg]
Is3 = ![]()
= ![]()
= 0,12 [kgm2]
Przyjmuję siłę zewnętrzną P2 = 200 [N]
3.2 OBLICZENIE SIŁ I MOMENTÓW OD SIŁ BEZWŁADNOŚCI
Obliczam siłę bezwładności ![]()
oraz moment od sił bezwładności ![]()
![]()
= -m3![]()
B3 = m3![]()
= 4 * 87,57 = 350,28 [N]
![]()
= -IS3![]()
![]()
= IS3ε3 = 0,12*291,727 = 35 [Nm]
Podziałka k1 = 0,01 ![]()
Równania równowagi sił zewnętrznych i reakcji działających na człony grupy strukturalnej (2, 3)
![]()
+ ![]()
+ ![]()
+ ![]()
+ ![]()
+ ![]()
= 0
W celu wykreślnego rozwiązania równania należy wyznaczyć składowe styczne:
![]()
= 0; -ε![]()
* BC + P2u = 0
![]()
= ![]()
Po podstawieniu wartości liczbowych:
![]()
= ![]()
= 135,62 [N]
![]()
= 0; -![]()
* CD - MB3 + B3h = 0
![]()
= ![]()
Po podstawieniu wartości liczbowych
![]()
= ![]()
= 117,37 [N]
Wykreślne rozwiązanie równania równowagi sił.
Przyjąłem podziałkę kR = 5 ![]()
(![]()
) = 27,124 [mm]
(![]()
) = 23,474 [mm]
(B3) = 70 [mm]
(P2) = 40 [mm]
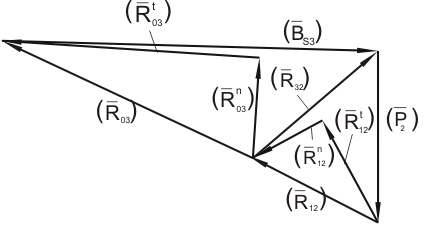
Z rysunku odczytuję:
(R12) = 32,79 [mm]
R12 = 163,95 [N]
(R03) = 64,47 [mm]
R03 = 322,35 [N]
Na podstawie równania równowagi sił dla członu 2 wyznaczam również reakcję R32
![]()
+ ![]()
+ ![]()
= 0
(![]()
) = 38,38 [mm]
![]()
= 191,9 [N]
Analiza sił działających na człon napędzający:
Równania równowagi sił:
![]()
+ ![]()
= 0
![]()
= - ![]()
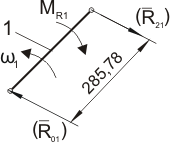
![]()
= 163,95 * 0,28578
![]()
= 55,427 [N]
Obliczenie momentu równoważącego MR1
MR1 - R21l1 = 0
MR1 = R21l1
MR1 = 163,95 * 0,28578 = 55,427031 [Nm]
![]()
MR1(spr) ω1 + P2VEcos(α2) + B3VS3cos(α3) + MB3 ω3 = 0
MR1(spr) = -![]()
Po podstawieniu danych liczbowych
MR1(spr) = -![]()
MR1(spr) = -56,5058 [Nm]
Znak (-) momentu równoważącego oznacza, że zwrot jest przeciwny do zwrotu prędkości kątowej członu 1 (jest to moment hamujący). Otrzymana wartość momentu równoważącego w porównaniu z momentem obliczonym na drodze analizy kinetostatycznej wskazuje, że obliczenia zostały wykonane poprawnie.
Wyszukiwarka