spis treści:
1. Założenia projektowo-konstrukcyjne…………………………………3
- dane sytuacyjne
- dane ilościowe
- kryteria wyboru
- Zadania do wykonania
2. Wstęp……………………………………………………..………….......5
- analiza literaturowa
- Podział chwytaków
Rozwiązania konstrukcyjne……………………………………………9
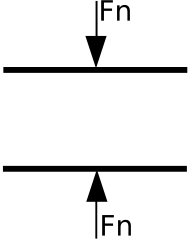
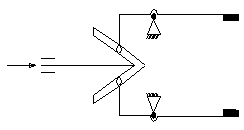
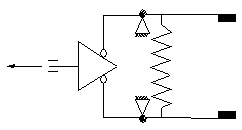
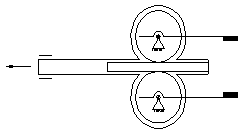
- Uogólnione schematy kinematyczne
- Uszczegółowienie rozwiązań konstrukcyjnych
4. Kryterialny wybór rozwiązania konstrukcyjnego metodą optymalizacji
Punktowej………………………………………………………………………..….14
- Uszczegółowienie rozwiązania konstrukcyjnego
- Zunifikowanie rozwiązania konstrukcyjnego
5. Obliczenia……………………………………………………………..29
- Objętość i masa obiektu manipulowanego
- Siła uchwytu w ruchu pionowym i obrotowym
6. Dobór siłownika……………………………………………………….33
Obliczenia wytrzymałościowe……………………………………..….35
- Przekrój ramienia pierwszego
- Przekrój drugiego ramienia
Dobór wymiarów sworznia…………………………………………. 38
Typoszereg………………………………….…………………………39
Wnioski…………………………………………………………….....39
- Literatura
- Załączniki
Objętośc obiektu
Masa obiektu manipulowanego
Siła ciężkości
Sila bezwładności
Siła uchwytu w ruchu pionowym
Założenia projektowo - konstrukcyjne
opracować uporządkowaną rodzinę konstrukcji w postaci typoszeregu chwytaków. Podstawowe relacje realizowane przez chwytak to: uchwycenie, trzymanie i uwolnienie, przemieszczenie obiektu. Sposób unieruchomienia obiektu: siłowo-kształtowy, za pomocą końcówek chwytnych.
● Dane sytuacyjne
Połączenie chwytaka ze współdziałającą kiścią robota realizowane jest kołnierzowo z kołkiem centralnym.
● Dane ilościowe
Dane charakterystyczne
D=4,2-5,2 [mm]
h=6,8-8,6 [mm]
Promień manipulatora R=230 [mm]
Prędkość kątowa ramienia ω=5 [m/s]
Tworzywo: PCV
kRYTERIA WYBORU NAJLEPSZEJ KONSTRUKCJI:
K1 - maksymalna zwartość konstrukcji chwytaka
K2 - minimalna masa
K3 - minimalna liczba elementów
K4 - maksymalna liczba elementów dobieranych
K5 - prostota montażu
K6 - prostota montażu kiści robota
K7 - zapewnienie prostoliniowości ruchu końcówek chwytaka
K8 - stabilna charakterystyka statyczna, przemieszczeniowa i siłowa
K9 - stabilność lub wzrost siły przy wzroście średnicy przemieszczenia obiektu
K10 - koszt
zadania do wykonania:
Przeprowadzić analizę literaturową oraz internetową
http://www.gemotec.com/
http://www.gimatic.com/
http://www.norgren.com/
http://www.schunk.com/home.html
Opracować pole możliwych rozwiązań chwytaków o ruchu kleszczowym oraz imadłowym.
Przeprowadzić optymalizację metodą punktową w zakresie:
układu napędowego
układu przemieszczenia
układu przemieszczenia końcówek chwytnych
Uszczegółowić wybrane rozwiązanie konstrukcyjne.
Zunifikować cechy charakterystyczne chwytaka.
Opracować wzorcową konstrukcje chwytaka z wyszczególnieniem typowych postaci konstrukcyjnych elementów oraz układów wymiarów.
Opracować graf relacji sprzężeń chwytaka.
Przedstawić charakterystykę siłową i przemieszczeniową wzorcowej konstrukcji chwytaka.
Opracować algorytm a następnie program doboru ilościowych cech konstrukcyjnych dla typowej postaci konstrukcyjnej, z zastosowaniem operatorów:
● geometrycznych
● wytrzymałościowych
● elementów dobieranych
● procesu wytwórczego
● podobieństwa konstrukcyjnego
● wymiarów sprzężonych
Wyszczególnić konstrukcje elementów i utworzyć ich rysunki katalogowe.
Utworzyc założenia wybranego chwytaka.
Przeprowadzic symulacje działania chwytaka.
WSTĘP
Analiza literaturowa:
Chwytak to w robotyce oprzyrządowanie manipulatorów, robotów, dające możliwość chwycenia i transportu przedmiotów w zautomatyzowanych czynnościach precyzyjnych. Chwytak może być wyposażony w narzędzie (np. lutownica, spawarka), umożliwiające realizację określonych czynności.
Chwytaki w procesie manipulacji realizują trzy podstawowe zadania:
Pobranie obiektu z położenia początkowego
Trzymanie obiektu w czasie trwania jego przemieszczania
Uwolnienie obiektu w miejscu docelowym
Podział chwytaków:
● Ze względu na liczbę szczęk:
- dwu szczękowe
- trójszczękowe
- inne
● Ze względu na rodzaj napędu:
- mechaniczny
- hydrauliczny
- pneumatyczny
- elektromagnetyczny
- adhezyjny
● Ze względu na sposób mocowania chwytaka:
- ręczny
- automatyczny (z adapterem)
● Ze względu na układ przeniesienia napędu:
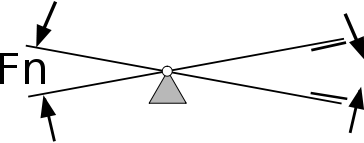
Nożycowy
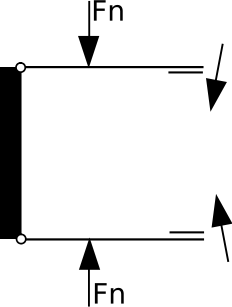
Szczypcowy
Imadłowy

Opasujący
Dźwigniowy
Jarzmowy
Klinowy
Zębaty
● Ze względu na sposób trzymania obiektu:
Siłowe
Kształtowe
Siłowo -kształtowe
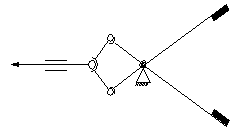
Z analizy kryterialnej wynika, że najlepszym rozwiązaniem dla naszych kryteriów jest koncepcja nr 5.Koncepcja ta uzyskała 72% koncepcji idealnej
Rys. Schemat kinematyczny wybranego chwytaka
Uszczegółowienie rozwiązania konstrukcyjnego
Rys 4. Położenie początkowe chwytaka wraz z wymiarami
Rys 5. Położenie chwytaka w uchwyceniu
Obliczam skok siłownika na podstawie rys. 4 i 5:
Rys 6. Skrajne położenia chwytaka
Zunifikowanie rozwiązania konstrukcyjnego
Unifikacja.
Unifikacja to ograniczenie i porządkowanie wartości cech charakterystycznych.
Jej wynikiem są zunifikowane wartości cech charakterystycznych.
Cechy charakterystyczne chwytaka to:
sposób zamocowania: przyjmuję, że chwytak będzie zamocowany do ramienia robota poprzez kołnierz i śruby.
sposób zasilania: przyjmuję, że chwytak będzie napędzany przez siłownik pneumatyczny dwustronnego działania.
sposób realizacji ruchów końcówek chwytnych: siłownik przez przeguby i sworznie przekazuje siłę do końcówek chwytnych.
ciśnienie zasilania ( p=6 bar = 0,6 MPa)
- przyjmuje, że chwytak wykonany będzie ze stali
OBLICZENIA
1. Objętość obiektu manipulowanego (rys.):
V =
4
dmin = 4,2 [mm]
dmax = 5,2 [mm]
Hmin = 6,8 [mm]
Hmax = 8,6 [mm]
Vmin = (3,14 * (4,2)2 * 6,8) / 4 = 376,6 / 4 = 94,2 [mm3] = 0,094 [cm3]
Vmax = (3,14 * (5,2)2 * 8,6) / 4 = 730,19 / 4 = 182,55 [mm3] = 0,182 [cm3]
VI = (3,14 * (4,5)2 * 7) / 4 = 445,09 / 4 = 111,27 [mm3] = 0,111 [cm3]
VII = (3,14 * (4,8)2 * 7,5) / 4 = 542,59 / 4 = 135,65 [mm3] = 0,136 [cm3]
VIII = (3,14 * (5)2 * 8) / 4 = 628 / 4 = 157 [mm3] = 0,157 [cm3]
2. Masa obiektu manipulowanego:
ρ = 1,4 [g/cm3] - Gęstośc dla PCV
M = ρ * V - Wzór na masę chwytanego elementu:
Mmin = 1,4 * Vmin = 1,4 * 0,094 = 0,132 g
Mmax = 1,4 * Vmax = 1,4 * 0,182 = 0,255 g
MI = 1,4 * VI = 1,4 * 0,111 = 0,155 g
MII = 1,4 * VII = 1,4 * 0,136 = 0,190 g
MIII = 1,4 * VIII 1,4 * 0,157 = 0,220 g
Zamieniam gramy na kilogramy:
Mmin = 0,132 g = 0,000132 kg
Mmax = 0,255 g = 0,000255 kg
MI = 0,155 g = 0,000155 kg
MII = 0,190 g = 0,000190 kg
MIII = 0,220 g = 0,000220 kg
Maksymalna masa obiektu wynosi: Mmax = 0,000255 kg
Minimalna masa obiektu wynosi: Mmin = 0,000132 kg
3. Obliczam wartość siły ciężkości:
Do obliczeń przyjmuje:
a = 2 [m/s2] - przyśpieszenie
g = 9,81 [m/s2] - grawitacja ziemska
M = Mmax = 0,000255 [kg]
T- siła tarcia
G - siła ciężkości [N]
Fb- siła bezwładności [N]
μ = 0,6 - współczynnik tarcia
n = 2 - współczynnik bezpieczeństwa
Fch - siła chwytu
G = g * M = 9.81[m/s2] *0,000255[kg] = 0,00255 [N]
Siła ciężkości wynosi: G = 0,00255 N
4. Obliczam wartość siły bezwładności:
Fb =a * M = 2[m/s2] * 0,000255[kg] = 0,00051 [N]
Siła bezwładności wynosi: Fb = 0,00051 N
5. Obliczam siłę uchwytu w ruchu pionowym:
T = μ * N
μ * N ≥ G + Fb
N ≥ ( G + Fb ) / μ = ( 0,00255 + 0,00051 ) / 0,6 = 0,0051 [N]
Fch-pion = N * n = 0,0051 * 2 = 0,0102 [N]
Siła chwytu w ruchu pionowym wynosi Fch-pion = 0,0102 [N]
Rys. 7 Rozkład sił w ruchu pionowym wraz z wartościami
Siła uchwytu w ruchu obrotowym
Fw - siła wypadkowa
Fod - siła odśrodkowa
Fb - siła bezwładności
G - siła ciężkości
Rys.8 Rozkład sił w ruchu obrotowym
Do obliczeń przyjmuje:
R= 230 mm = 23cm = 0,23 m - promień ramienia manipulatora
ω = 5 [rad/ s2] - prędkość kątowa
M = Max - masa chwytanego elementu
Obliczam siłę odśrodkową:
![]()
Siła odśrodkowa wynosi 0,00147[N]
Obliczam siłę bezwładności:
![]()
Siła bezwładności wynosi 0,00051 N
Obliczam siłę ciężkości:
![]()
Siła ciężkości wynosi 0,0025 N
Obliczam siłę wypadkową:
![]()
Siła wypadkowa wynosi 0,00294 N
![]()
Siła uchwytu w ruchu obrotowym wynosi 0,00982 N
Porównuję ze sobą dwie wyliczone siły uchwytu:
---------------------------------- |
Siła uchwytu |
Ruch pionowy |
0,0102 [N] |
Ruch obrotowy |
0,00982 N |
DOBÓR SIŁOWNIKA
W celu dokładnego wyliczenia siły Fs (wymagana wartośc siły na siłowniku) wykorzystuje
rysunek nr 5. Wymiary zgodne z wcześniej przyjętymi, dodatkowo przyłożyłem dwie siły:
siłę Fch skierowana prostopadle w dół od środka pryzmy oraz siłę F1 skierowaną wzdłuż ramienia BD którą rozbijamy na dwie składowe rzutując na osie x i y.
Wyliczam wymaganą wartośc siły na siłowniku:
Fch = 0,0102 N
OBLICZENIA WYTRZYMAŁOŚCIOWE
Ramię 1
Ramię 2
Dobieram przekrój ramienia pierwszego:
Wyznaczenie siły Rb która spowoduje w punkcie „B” siłę Fch na końcu palca chwytnego - punkt „C”
Rys. 8 Przekrój ramienia pierwszego
Obliczam wartości niewiadomych sił:
Równania równowagi:
ΣFx = 0;
RAx = 0
Fch = 0,0102 [N]
ΣMA = 0;
RB * c - Fch * (b+c)= 0
RB * 0,025 = 0,0102 * 0,04
RB = 0,000408 / 0,025
RB = 0,0163 N
ΣFy = 0;
RAy + RB - Fch=0
RAy = - RB + Fch
RAy = - 0,0163 N + 0,0102 N
RAy = - 0,0061 N
Obliczam maksymalny moment gnący Mgmax:
Mg1 = RAy * x1
dla x1 = 0
Mg1 = - 0,0061 * 0 = 0
dla x1 = c = 0,025 m
Mg1 = - 0,0061 * 0,025 = 0,000153 Nm
Mg1 = 0,000153 Nm = 0,153 Nmm
Mg2 = RAy * (c + x2) + RB * x2
dla x2 = 0
Mg2 = RAy * c = - 0,0061 * 0,025 = 0,000153 Nm
dla x2 = l = 0,015 m
Mg2 = RAy * (0,025 + 0,015) + RB * 0,015
Mg2 = - 0,0061 * 0,04 + 0,0163 * 0,015
Mg2 = - 0,000244 + 0,000244
Mg2 = 0 Nm
Maksymalny moment gnący wystąpi w punkcie B
Mgmax = 0,000153 Nm
Obliczam na podstawie Mgmax przekrój palca chwytnego z warunku wytrzymałości na zginanie:
Dobrano przekrój ramienia 1 o boku: 3[mm]
Dobieram przekrój ramienia drugiego:
d = 0,015 [m]
F =Rb /sin45°
F = RB = 0,0163 N / 0,707
F = 0,0231 N
Mgmax = F * d
Mgmax = 0,0231 N * 0,015 m
Mgmax = 0,00035 Nm = 0,347 Nmm
Dobrano przekrój ramienia 2 o boku: 3 [mm]
DOBÓR WYMIARÓW SWORZNIA
Rys. 8 Połączenie sworzniowe
Obliczam średnice sworznia:
F / [( π * d2 * 2) / 4] ≤ kg
F = 0,0231 N
kg = 30 MPa
d2 ≥ (2 * F) / (π * kg)
d2 = (2 * 0,0231) / (3,14 * 30)
d2 = 0,0462 / 94,2
d2 = 0,05 mm
d = 0,3mm
W celu zwiększenia bezpieczeństwa dobieram sworzeń o średnicy większej równej d = 1 mm
TYPOSZEREG DLA WYBRANEGO ELEMENTU
Model |
Długośc całkowita chwytaka [mm] |
Długośc palca chwytnego [mm] |
Szerokośc palca chwytnego [mm] |
Dłogosc ramienia 2 [mm] |
A1 |
35 |
15 |
2 |
9 |
A2 |
45 |
25 |
3 |
11 |
A3 |
55 |
35 |
3 |
13 |
Podstawowy |
65 |
45 |
3 |
15 |
A4 |
75 |
55 |
3 |
17 |
A5 |
85 |
65 |
4 |
19 |
A6 |
95 |
75 |
4 |
21 |
WNIOSKI:
21


d2 * Π * H
D
h
Wyszukiwarka