Politechnika Świętokrzyska w Kielcach |
||||
Laboratorium maszyn elektrycznych |
||||
Ćwicenie nr 4 |
Temat: Badanie silnika synchronicznego. .
|
Zespół: 1)Koza Marek 2)Małaczek Mariusz 3)Łaskawski Mariusz 4)Rolka Dominik 5)Słoma Rafał
|
||
Data wykonania ćwiczenia:
04.05.1997 r. |
Data oddania sprawozdania:
11.05.1997 r. |
Ocena: |
||
1.Cel ćwiczenia :
Celem ćwiczenia jest poznanie sposobów rozruchu i własności silnika synchronicznego trójfazowego przy zasilaniu z sieci sztywnej ,tzn. takiej, w której napięcie i częstotliwość są stałe. Wyznaczone na podstawie pomiarów charakterystyki powinny pozwolić na ocenę własności ruchowwych i eksploatacyjnych silnika synchronicznego.
2. Program ćwiczenia:
- rozruch silnika synchronicznego
- pomiar krzywych 'V'
3. Wprowadzenie:
Maszyna synchroniczna jest to maszyna prądu przemiennego , której wirnik obraca się z taką samą prędkością z jaką wiruje pole magnetyczne. W swej klasycznej postaci maszyna synchroniczna nie posiada początkowego momentu rozruchowego. Na obwodzie stojana rozmieszczone jest symetrycznie uzwojenie prądu przemiennego. Zasilane jest trójfazowym symetrycznym napięciem przemiennym , które wytwarza stumień wirujący. Natomiast uzwojenie wzbudzenia zasilone jest ze żródła prądu stałego, wytwarza strumień nieruchomy w stosunku do wytwarzającego go uzwojenia wirnika.
Stosujesię różnorodne sposoby rozruchu silników synchronicznych:
a) rozruch za pomocą obcej maszyny
b) rozruch częstotliwościowy
c) rozruch asynchroniczny
Uzwojenie wzbudzenia na czas rozruchu należy zewrzeć przez odpowiednią rezystancję równą 5 - 10 krotnej wartości rezystancji wzbudzenia .
4.Dane techniczne maszyny.
Silnik synchroniczny:
Typ GBOd 22b Nr 6385 Rok 1972 Ciężar 67 kg
Moc 4 kW U 400V I 7.2A f 50Hz
cos ϕ =0.8 nh 3000obr/min
Klim N T 40°C Kl izol E η 0.73
Ifo 2.1 A IfN 4.45 A
Norma PN-65E-06000 Poziom S
Prądnica:
Typ PZMb 044a IP 14 Nr 468088 Rok 1968
Moc 2.2kW U 110V I 24.2A
wzb. wł I 0.66A n 2850obr/min
T 40°C Typ izol B
Norma PN-65E-06000
5. Schemat układu pomiarowego:
6.Tabele pomiarowe.
6.1. Wyznaczenie krzywych „V”.
Iwp=0 I0=0 U0=0
Iws |
I1 |
I2 |
I3 |
Is1 |
[A] |
[A] |
[A] |
[A] |
[A] |
0 |
5 |
5 |
5 |
5 |
1 |
2.6 |
3 |
3 |
2.8 |
1.5 |
1.3 |
1.6 |
1.5 |
1.4 |
2 |
0.6 |
0.7 |
0.5 |
0.6 |
2.5 |
1.4 |
1.2 |
1.2 |
1.2 |
3 |
2.7 |
2.6 |
2.5 |
2.6 |
3.5 |
4 |
3.8 |
3.7 |
3.8 |
4 |
5.3 |
5 |
5.1 |
5.1 |
Iwp=0.3 I0=1.2 U0=70
Iws |
I1 |
I2 |
I3 |
Is2 |
[A] |
[A] |
[A] |
[A] |
[A] |
0 |
6.1 |
6.5 |
6.4 |
6.3 |
1 |
3.6 |
4 |
3.8 |
3.8 |
1.5 |
2.5 |
2.8 |
2.6 |
2.6 |
2 |
2.1 |
2.3 |
2 |
2.1 |
2.5 |
2.5 |
2.2 |
2.2 |
2.3 |
3 |
3.4 |
3.4 |
3.1 |
3.3 |
3.5 |
4.5 |
4.4 |
4.1 |
4.3 |
4 |
5.5 |
5.4 |
5.3 |
5.4 |
Iwp=1.5 I0=6.5 U0=44
Iws |
I1 |
I2 |
I3 |
Is3 |
[A] |
[A] |
[A] |
[A] |
[A] |
0 |
5.7 |
6 |
6 |
5.9 |
1 |
2.8 |
3.1 |
3 |
2.9 |
1.5 |
1.6 |
1.8 |
1.7 |
1.7 |
2 |
1.2 |
1.3 |
1 |
1.1 |
2.5 |
1.9 |
1.9 |
1.6 |
1.8 |
3 |
3 |
2.9 |
2.6 |
2.8 |
3.5 |
4.1 |
4 |
3.8 |
3.9 |
4 |
5.4 |
5.3 |
5.2 |
5.3 |
6.2. Wyznaczenie charakterystyk kątowych maszyny synchronicznej .
IWS=0
UO |
IO |
IP |
ν |
M1 |
[V] |
[A] |
[A] |
[°] |
[W] |
43 |
0.5 |
0 |
0 |
17.2 |
27 |
4.5 |
0.1 |
2 |
97.2 |
40 |
7.5 |
0.15 |
5 |
240 |
58 |
9.5 |
0.23 |
10 |
440.8 |
68 |
11.5 |
0.29 |
15 |
625.6 |
74 |
12.5 |
0.32 |
20 |
740 |
80 |
13.5 |
0.37 |
25 |
864 |
82 |
14 |
0.38 |
30 |
951.2 |
85 |
14.5 |
0.4 |
35 |
986 |
IWS = 1 A
UO |
IO |
IP |
ν |
M2 |
[V] |
[A] |
[A] |
[°] |
[W] |
4.6 |
0.7 |
0 |
0 |
25.7 |
48 |
8 |
0.19 |
5 |
307.2 |
68 |
11.5 |
0.28 |
10 |
625.6 |
84 |
14 |
0.4 |
15 |
940.8 |
94 |
16 |
0.49 |
20 |
1203.2 |
104 |
17.5 |
0.61 |
25 |
1456 |
IWS = 3 A
UO |
IO |
IP |
ν |
M3 |
[V] |
[A] |
[A] |
[°] |
[W] |
4.7 |
0.75 |
0 |
0 |
2.8 |
60 |
10 |
0.24 |
5 |
480 |
90 |
15 |
0.44 |
10 |
1080 |
110 |
17 |
0.68 |
14.5 |
1496 |
7.Przykładowe obliczenia.
Is1=(I1+I2+I3)/3 np. Is1=(2.6+3+3)/3=2.8
M1=U0*I0*η np. M1=27*4.5*0.8=97.2
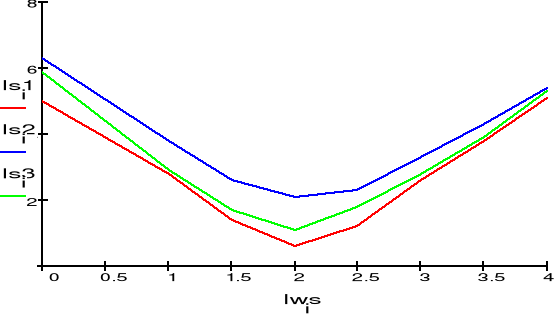
8.Charakterystyki.
a) charakterystyki regulacyjne silnika synchronicznego, zależność prądu twornika IS od prądu wzbudzenia IWS
b)charakterystyki kątowe silnika M=f(ν)
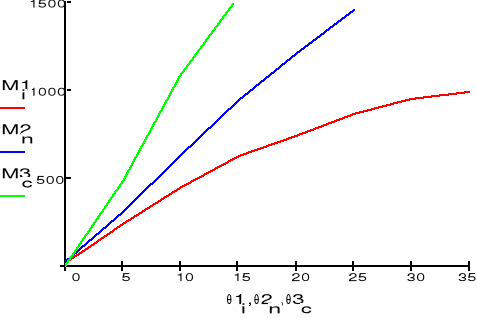
M1i → IWS = 0 A
M2n → IWS = 1 A
M3c → IWS = 3 A
9.Uwagi i wnioski.
Na podstawie dokonanych pomiarów, wykreślamy charakterystyki It = f(IWS) .Jak się można było spodziewać mają one charakterystyczny kształt , zbliżony do litery „V” . Stąd te charakterystyki nazywamy krzywymi V .Widać, że jeżeli poprowadzimy linię łączącą minima krzywych, to obszar pracy zostanie podzielony na dwie części : praca przy obciążeniu o charakterze indukcyjnym odpowiada obszarowi na lewo (maszyna niedowzbudzona), praca przy obciążeniu o charakterze pojemnościowym odpowiada obszarowi na prawo (maszyna przewzbudzona).
Zauważamy, że wartość prądu It pobieranego przez silnik z sieci zależna jest od momentu obciążenia i od wartości prądu wzbudzenia IWS. W miarę zwiększania prądu IWS, na początku prąd It maleje do pewnej wartości zależnej od ustalonej mocy P , zaś potem wzrasta.
Stwierdzamy także, że najkorzystniejsza dla silnika synchronicznego jest ta wartość prądu wzbudzenia, przy której prąd obciążenia jest najmniejszy. Dla tego stanu pracy moc elektryczna pobierana przez silnik z sieci jest najmniejsza, a zatem straty w uzwojeniach stojana są najmniejsze.
Charakterystyki kątowe silnika synchronicznego zdjęliśmy dla wąskiego przedziału kąta υ.
Ograniczenie takie narzuciło nam obciążenie silnika ,w postaci prąnicy prądu stałego o parametrach przedstawionych w p.4.Z wykreślonych charakterystyk i tak można domniemywać , że będą one miały charakter sinusoidalny .Wskazuje na to najwyraźniej charakterystyka wykreślona dla IWS = 0.
Zalety i wady silnika synchronicznego.
Najważniejszą wadamą silnika synchronicznego jest skomplikowana w porównaniu z silnikiem indukcyjnym budowa i związana z tym wysoka cena tego silnika oraz skomplikowany rozruch wymagający wykwalifikowanej obsługi.
Główną zaletą tego silnika jest to, że będąc odbiornikiem mocy czynnej pobieranej z sieci może on równocześnie być i najczęściej jest żródłem mocy biernej indukcyjnej oddawanej do systemu energetycznego (praca przy przewzbudzeniu).
Praca przy niedowzbudzeniu jest niepożądana, gdyż silnik pobiera moc bierną indukcyjną, wykazuje mniejszą przeciążalność i większą skłonność do wypadania z synchronizmu niż przy przewzbudzeniu.
Wyszukiwarka