POLITECHNIKA ŚWIĘTOKRZYSKA W KIELCACH |
||
LABORATORIUM NAPĘDU ELEKTRYCZNEGO |
||
Temat ćwiczenia :
Model silnika obcowzbudnego prądu stałego zrealizowany w pakiecie Matlak-Simulink |
Wykonał:
Kmiecik Sebastian
|
|
Ocena: |
Specjalność: EPiE |
|
Model silnika prądu stałego
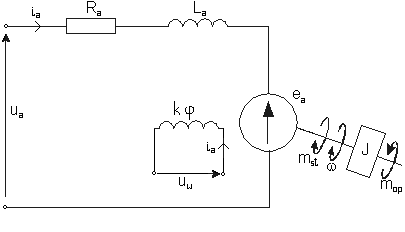
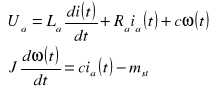
Równania opisujące silnik:
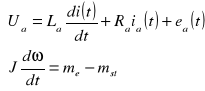
gdzie:
![]()
- indukcyjność twornika silnika
![]()
- rezystancja obwodu twornika
![]()
- siła elektromotoryczna indukowana w tworniku silnika
![]()
- moment bezwładności układu napędowego sprowadzony na wał silnika
![]()
- moment obciążenia silnika
![]()
- moment elektromagnetyczny silnika
Wyznaczanie parametrów silnika obcowzbudnego prądu stałego
Dane znamionowe silnika i układu napędowego:
Moc znamionowa: ![]()
Napięcie zasilania znamionowe: ![]()
Prąd twornika znamionowy: ![]()
Prędkość obrotowa znamionowa: ![]()
Indukcyjność obwodu twornika: ![]()
Moment bezwładności: ![]()
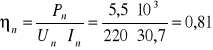
sprawność znamionowa silnika:
rezystancja twornika:
![]()
prędkość kątowa znamionowa:
![]()
stała konstrukcyjna c:
![]()
moment obciążenia znamionowy:
moment elektromagnetyczny znamionowy:
![]()
prędkość biegu luzem:
![]()
mechaniczna stała czasowa:
![]()
elektryczna stała czasowa:
![]()
Model symulacyjny silnika prądu stałego w MATLAB'ie
Zawartość skryptu potrzebnego do wyznaczenia stałych użytych w modelu silnika:
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clc
clear all
%%%%% dane znamionowe %%%%
Pn=5500;
Un=220;
In=30.7;
nn=600;
ks=0.5;
La=0.02;
J=0.8;
%%%% obliczenia stałych %%%%%%
wn=pi*nn/60;
Mstn=Pn/wn;
Nn=Pn/(Un*In);
Ra=(Un/In)*ks*(1-Nn);
c=(Un-Ra*In)/wn;
Tm=(Ra*J)/(c*c);
Te=La/Ra;
%%%% zasilanie i obciążenie %%%%
Ua=Un;
Mst=Mstn;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
Schemat symulacyjny w SIMULINK'u:
Aby przebiegi prądu prędkości były poprawne w zakresie ujemnych i dodatnich wartości napięcia zasilania Ua oraz ujemnych i dodatnich wartości momentu obciążenia, schemat został zmodyfikowany do postaci:
Z modelu silnika stworzony został subsystem i wyjścia sygnałów prądu i prędkości kątowej zostały dodane bloki eksportu do przestrzeni roboczej, dla ułatwienia symulacji, przez co model wygląda następująco:
Przebiegi prędkości kątowej i prądu silnika jako odpowiedzi na sygnał jednostkowy zasilania przy stałym, znamionowym momencie obciążenia.
Charakterystyki silnika o transmitancji wymuszeniowej:
![]()
![]()
amplitudowa i fazowa (bode)
amplitudowo-fazowa (nyquist)
odpowiedzi na skok jednostkowy (step)
Dobór układu regulacji
Poniższy rysunek przedstawia schemat układu regulacji napędu z przekształtnikiem tyrystorowym i regulatorem prądu oraz prędkości:
Transmitancja przekształtnika tyrystorowego

gdzie:
- ![]()
- współczynnik wzmocnienia przekształtnika tyrystorowego 
- ![]()
- czas zdwojenia przekształtnika tyrystorowego ![]()
Transmitancja części elektrycznej silnika
![]()
gdzie:
- ![]()
- wzmocnienie części elektrycznej silnika
- ![]()
- stała czasowa części elektrycznej silnika
Dobór regulatora prądu
Transmitancja regulatora prądu:
![]()
gdzie:
- ![]()
- współczynnik wzmocnienia regulatora
- ![]()
- stała czasowa regulatora
Według kryterium modułu stała czasowa ![]()
powinna być równa stałej czasowej elektromagnetycznej silnika ![]()
, więc ![]()
, natomiast wzmocnienie ![]()
opisuje zależność:
![]()
gdzie:
![]()
- stała czasowa sprzężenia zwrotnego obiektu regulacji prądu
Dobór parametrów regulatora prędkości
Transmitancja regulatora prędkości:
![]()
gdzie:
- ![]()
- współczynnik wzmocnienia regulatora
- ![]()
- stała czasowa regulatora
Według kryterium symetrii stała czasowa ![]()
określona jest zależnością:
![]()
Natomiast wzmocnienie regulatora ![]()
, opisuje zależność:
![]()
gdzie:
![]()
- stała czasowa sprzężenia zwrotnego obiektu regulacji prędkości
Transmitancja układu otwartego części elektrycznej silnika z regulatorem prądu i przekształtnikiem tyrystorowym:
![]()
Zatem transmitancja układu zamkniętego części elektrycznej silnika z regulatorem prądu i przekształtnikiem tyrystorowym wynosi:

Charakterystyki silnika o powyższej transmitancji:
amplitudowa i fazowa (bode)
amplitudowo-fazowa (nyquist)
odpowiedzi na skok jednostkowy (step)
Wyszukiwarka